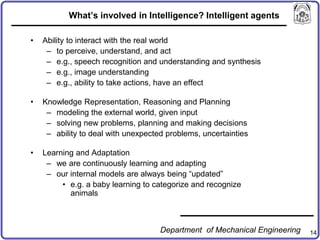
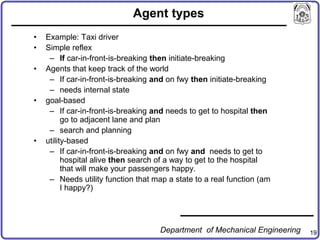
The document covers concepts in artificial intelligence and machine learning, detailing intelligent agents, their types, and decision-making applications. It discusses the design of rational agents, including their performance measures and autonomy, along with examples like vacuum cleaners and automated taxi drivers. Additionally, it highlights the importance of learning, adaptation, and interaction with the environment for intelligent agent functionality.








![9
Agents and environments
• The agent function maps from percept histories to actions:
•
[f: P* → A]
• The agent program runs on the physical architecture to
produce f
• agent = architecture + program
Department of Mechanical Engineering](https://image.slidesharecdn.com/machinelearningl2-241124184925-79ae6d65/85/Machine-Learning-Lecture-Number-two-9-320.jpg)
![10
Vacuum-cleaner world
• Percepts: location and contents, e.g., [A,Dirty]
• Actions: Left, Right, Suck, NoOp
Department of Mechanical Engineering](https://image.slidesharecdn.com/machinelearningl2-241124184925-79ae6d65/85/Machine-Learning-Lecture-Number-two-10-320.jpg)