• ご協力、情報提供およびコメントをいただいたみなさまに御礼申し上げます。
o JaSST’12,13東海ポスターセッションで有益なコメントを頂いたみなさま
o SQiPシンポジウム2012, 2013 のSIGでご協力いただいたみなさま
o WACATE分科会でアンケートやディスカッションにご協力いただいたみなさま、
有益なコメントをいただいたみなさま
o 第8回SQuBOKユーザ会勉強会にて議論させていただいたみなさま
o Webやアンケート用紙にて、ご回答をいただいたみなさま
o その他、活動のご支援やコメント等ご協力いただいたすべてのみなさま
ありがとうございました。
3
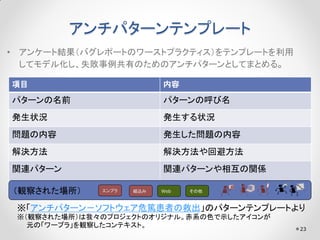
まとめ(2/2)
• アンチパターンテンプレートと適用例
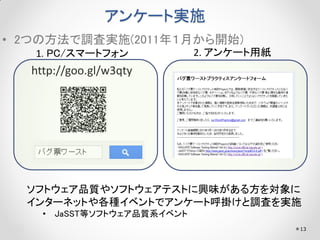
o バグピンポン
oバベルの塔
o 「これくらいわかってくれよ」症候群
o ダブリ/マルチ
• 今後の展望
o アンチパターン集の拡充
o BTSオンラインヘルプなどへの組込み
o アンチパターン検出と示唆(サジェスト)機能の検討
続きはコミュニティブースで!
32

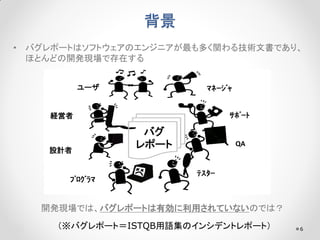

![アンケート結果1: 回答者
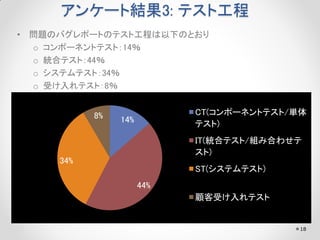
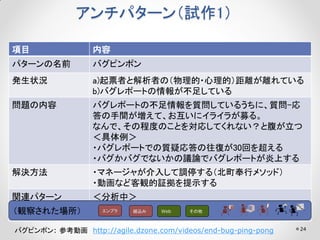
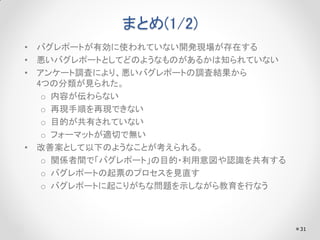
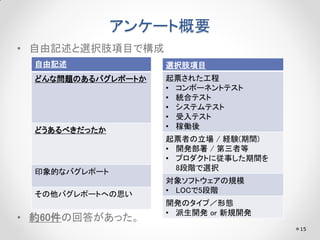
• 回答者の立場は以下のとおり
o 開発者・テスト担当者:それぞれ約30%
o 出荷テスト担当者:24%
o 分析担当等:17%
17%
29%
バグを報告する立場(チーム
内)[開発部署内のテストチー
ムなど]
バグを修正する立場(チーム
内)[開発者など]
バグを報告する立場(第三者)
[出荷検査実施者など]
24%
30%
上記以外の立場(バグ票を分
析する立場 等)
16](https://image.slidesharecdn.com/jasst14tokyorev7-140307174918-phpapp02/85/Jasst14tokyo-_-16-320.jpg)
![アンケート結果2: 起票者
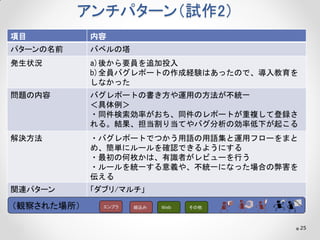
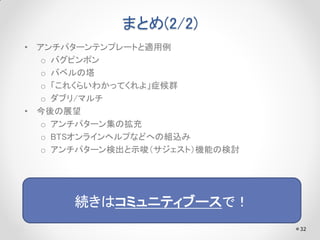
• バグレポート起票者の立場は以下のとおり
o 開発内テスト担当者:46%
o 開発者:20%
o 開発チーム外のテスト担当者、データ分析者:34 %
9%
25%
46%
バグを報告する立場(チーム
内)[開発部署内のテストチーム
など]
バグを修正する立場(チーム
内)[開発者など]
バグを報告する立場(第三者)
[出荷検査実施者など]
20%
上記以外の立場(情報を分析す
る立場 等)
17](https://image.slidesharecdn.com/jasst14tokyorev7-140307174918-phpapp02/85/Jasst14tokyo-_-17-320.jpg)