Recommended
PDF
PDF
PPTX
PDF
HTTP/2 でリバプロするだけでグラフツールを 高速化できた話
PDF
PDF
PDF
PDF
IETF93 Prague報告Web関連+QUIC
PPTX
PDF
PDF
PDF
PPTX
PDF
PDF
PDF
Stuart attacking http2 implementations truefinal-jp
PDF
PDF
PPT
PDF
PDF
PDF
Lagopus, raw socket build
PDF
PPT
PDF
PDF
NetBSD/evbarm on Raspberry Pi
PDF
http2study 20160423 IETF95 Report
PDF
HTML5と WebSocket / WebRTC / Web Audio API / WebGL 技術解説
PPTX
20151110 ドメイン駆動設計によるサービス開発
PDF
Javaトラブルに備えよう #jjug_ccc #ccc_h2
More Related Content
PDF
PDF
PPTX
PDF
HTTP/2 でリバプロするだけでグラフツールを 高速化できた話
PDF
PDF
PDF
PDF
IETF93 Prague報告Web関連+QUIC
What's hot
PPTX
PDF
PDF
PDF
PPTX
PDF
PDF
PDF
Stuart attacking http2 implementations truefinal-jp
PDF
PDF
PPT
PDF
PDF
PDF
Lagopus, raw socket build
PDF
PPT
PDF
PDF
NetBSD/evbarm on Raspberry Pi
PDF
http2study 20160423 IETF95 Report
PDF
HTML5と WebSocket / WebRTC / Web Audio API / WebGL 技術解説
Viewers also liked
PPTX
20151110 ドメイン駆動設計によるサービス開発
PDF
Javaトラブルに備えよう #jjug_ccc #ccc_h2
PDF
静的解析とUIの自動生成を駆使してモバイルアプリの運用コストを大幅に下げた話
PPTX
うしちゃん WebRTC Chat on SkyWayの開発コードw
PDF
PDF
PDF
PDF
Namespace API を用いたマルチテナント型 Web アプリの実践
PDF
PDF
PDF
PDF
Go1.8 for Google App Engine
PDF
Mobile Apps by Pure Go with Reverse Binding
PDF
goパッケージで型情報を用いたソースコード検索を実現する
PDF
PDF
PDF
メルカリ・ソウゾウでは どうGoを活用しているのか?
PDF
PDF
Google Assistant関係のセッションまとめ
PPTX
WebRTC Browsers n Stacks Implementation differences
Similar to HTTP2 時代の Web - web over http2
PPTX
PDF
PPTX
PPTX
もしWebセキュリティのエンジニアがRFC7540の「HTTP/2アプリ」をWeb診断したら
PDF
PDF
PDF
HTTP/2.0がもたらす�Webサービスの進化(後半)
PDF
第43回HTML5とか勉強会 SPDY/QUICデモ
PDF
PDF
PDF
Janogia20120921 yoshinotakeshi
PDF
最新Web 通信系API総まくり!WebRTC, Streams, Push api etc.
PDF
PPTX
httpbis interim とhttp2.0相互接続試験の話
PDF
PPTX
PDF
20161017 セレス合同勉強会http:2 web公開用
PPTX
新しいWEB時代の幕開けだ!次世代プロトコルHTTP2.0でWEBを最適化しよう!
PPTX
PPT
More from Jxck Jxck
PDF
PDF
PDF
Isomorphic Architecture & Interface
PDF
PDF
PDF
HTTP2Study chronicle #http2conf
PDF
mozaicfm-ep8 #altJS @ll-diver
PDF
PDF
Why HTML Form dose not support PUT & DELETE ?
PDF
Next generation web talk @cross2014
PDF
HTTP2 & HPACK #pyfes 2013-11-30
PDF
Network server in go #gocon 2013-11-14
PDF
SPDY & HTTP2.0 & QUIC - #bpstudy 2013-08-28
PDF
Http2.0 Guide 2013-08-14 #http2study
PDF
Gtug girls meetup web socket handson
PDF
Next generation web talk @cross2013
PDF
PDF
PDF
Real Time App with Node.js
PDF
I visited JSConf + NodeConf + Joyent
Recently uploaded
PDF
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
PPTX
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
HTTP2 時代の Web - web over http2 1. 2. ● id: Jxck
● github: Jxck
● twitter: @jxck_
● about: http://jxck.io
● blog: http://jxck.hatenablog.com
● podcast: http://mozaic.fm
● Love: music
Jack
3. 4. 5. 6. ● #1 2013/08/14
● #2 2013/10/17
● #3 2014/01/28
● #4 2014/03/20
● #5 2014/07/30
● #6 2014/11/25
Meetup - #http2study
http://connpass.com/series/457/
● IETF briefing session
● spec discuttion
● implementation tips
● project sharing
● etc
7. ● #1 2014/02/23
● #2 2014/05/24
● #3 2014/09/06
● #4 2015/01/24
Hackathon
● issuethon 2014/04/12
○ discuttion on http2
issues on ML & github
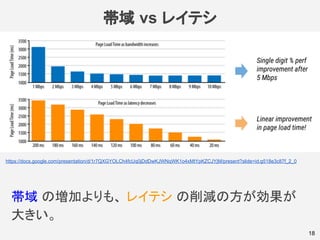
8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 帯域 vs レイテシ
帯域 の増加よりも、 レイテシ の削減の方が効果が
大きい。
18
https://docs.google.com/presentation/d/1r7QXGYOLCh4fcUq0jDdDwKJWNqWK1o4xMtYpKZCJYjM/present?slide=id.g518e3c87f_2_0
19. 速くするために
● RTT (Round Trip Time) を減らす
○ 物理的に近くする
○ レスポンスを速くする
● RT (Round Trip) を減らす
○ アクセスする回数を減らす
○ キャッシュしてアクセスを減らす
○ なんとかしてアクセスしないで済ます
19
20. 21. 22. 23. 24. 25. 26. 27. 回避策
27
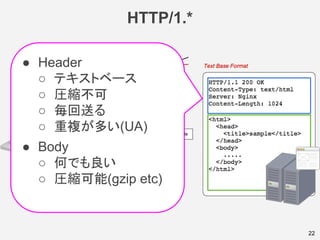
● HTTP
○ Keep Alive
○ CSS Sprite
○ File Concat
○ Domain Sharding
● TCP
○ TCP Fast Open
○ InitCWND 10
○ TLS Session Ticket
○ TLS False Start
http://www.oreilly.co.jp/books/9784873114460/
http://www.oreilly.co.jp/books/9784873113616/
28. 回避策
28
● HTTP
○ Keep Alive
○ CSS Sprite
○ File Concat
○ Domain Sharding
● TCP
○ TCP Fast Open
○ InitCWND 10
○ TLS Session Ticket
○ TLS False Start
Bad
Hack
Kernel
level
http://www.oreilly.co.jp/books/9784873114460/
http://www.oreilly.co.jp/books/9784873113616/
29. 30. 31. 32. 33. 34. 35. 36. 37. 38. 39. 積極的な Cache Contorl
● Browser Cache
○ 熾烈な奪い合い
○ 75% の人は 48h で領域を使い切る
○ see also: http://bit.ly/1HUy0Ex
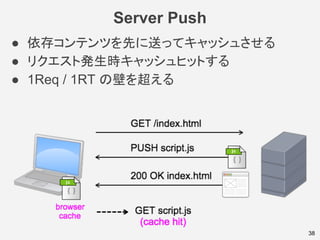
● Push で積極的な Cache 管理
39https://github.com/h2o/h2o/issues/421
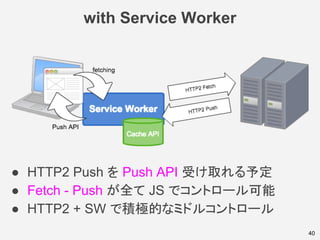
40. 41. Push が入ることの意味
41
● HTTP が Fetch と Push の両方をカバーした
● 双方向通信に必要な機能が揃った
● コンテンツ配信だけじゃもったいない
● 使用例
○ WebSocket over HTTP2 (策定中)
○ gRPC (push は未サポート?)
○ Servlet 4.0 (push の扱いを議論中)
○ Service Worker の Push API (議論中)
コンテンツ配信の枠を超え
アプリケーションからより
積極的に使えるプロトコルに
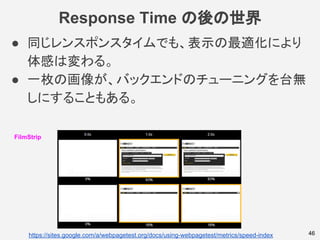
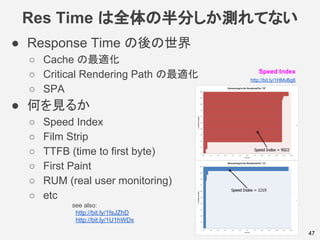
42. 43. 44. 45. 46. 47. Res Time は全体の半分しか測れてない
● Response Time の後の世界
○ Cache の最適化
○ Critical Rendering Path の最適化
○ SPA
● 何を見るか
○ Speed Index
○ Film Strip
○ TTFB (time to first byte)
○ First Paint
○ RUM (real user monitoring)
○ etc
47
see also:
http://bit.ly/1fsJZhD
http://bit.ly/1U1hWDx
Speed Index
http://bit.ly/1HMvBg6
48. 49. 最適化
49
● HTTP/1.1 向けハック
○ JS の concat
○ CSS の concat
○ 画像の Sprite
○ Sprite のための CSS
○ ドメイン分ける
○ etc
Bad Hack 無しの素直な作りでも遅くなら
なかったとしたら?
http://www.oreilly.co.jp/books/9784873114460/
http://www.oreilly.co.jp/books/9784873113616/
50. 51. 52. インフラ
● Load Balance どうするの?
● HTTPS の終端は?
● CDN は?
● 証明書管理は?
● etc
52see also: http://bit.ly/1PqYWNB
need more
知見
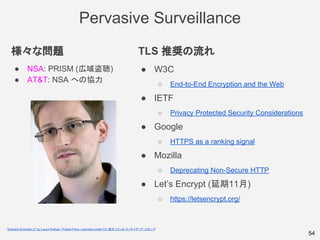
53. 54. 様々な問題
● NSA: PRISM (広域盗聴)
● AT&T: NSA への協力
TLS 推奨の流れ
● W3C
○ End-to-End Encryption and the Web
● IETF
○ Privacy Protected Security Considerations
● Google
○ HTTPS as a ranking signal
● Mozilla
○ Deprecating Non-Secure HTTP
● Let’s Encrypt (延期11月)
○ https://letsencrypt.org/
54
"Edward Snowden-2" by Laura Poitras / Praxis Films. Licensed under CC 表示 3.0 via ウィキメディア・コモンズ
Pervasive Surveillance
55. HTTPS は前提?
55
● HTTP2
○ 仕様上は平文もあるが、ブラウザは実装してない。
● WebRTC
○ HTTPS じゃないと getUserMedia が毎回要確認
● Service Worker
○ HTTPS じゃないと登録できない
● HSTS
○ HTTPS で接続させる
● Oppotunistic Encryption
○ HTTP でも暗号化する
● Upgrade Insecure Request
○ http:// を https:// に読み替えてリクエスト
see also: http://bit.ly/1Lq1fT9
56. 57. ハイパージャイアントニーズ
● 戦ってるレベルが違う
○ 毎日が DOS
○ 1byte 減らすインパクトが違う
○ 効率が良くなると DC レベルでメリット
○ 知見もリソースも潤沢
● そうじゃないと HTTP2 はいらない?
○ 小さくても複雑なアプリ
○ 中くらいでもよく使われるサービス
○ HTTP/1.1 との戦いは Web 全体の課題
57
使わないといけなくはない
使ってはいけなくもない
58. 59. 60. 61. 敷居は高いのか
● 突き詰めれば難しい
○ それは HTTP/1.1 も同じでは?
○ ノウハウがどこまで増えるか
● 敷居は仕様よりエコシステム
○ ツールなどの支援
○ フレームワークの抽象化
○ 気がついたら使ってた までの道のり
● HTTP/1.1 とのセマンティクス互換
○ 深入りしないなら入るのも抜けるのもできる
○ ミドルウェアの抽象化に任せていれば意識しない?
61
62. 広がるエコシステム
● servlet 4.0
○ ミドルレイヤの仕様への導入: http://bit.ly/1PDc8iW
● HDFS
○ ミドルウェアの通信プロトコルに: http://bit.ly/1hvxhR9
● grpc:
○ 汎用 RPC として: http://bit.ly/1MI5QjP
● F5-BigIP:
○ gateway レベルで対応: http://bit.ly/1LmYxe4
● CURL:
○ いつものツールが: http://bit.ly/1Eb19wi
62
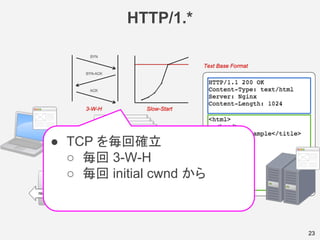
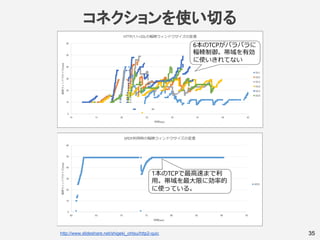
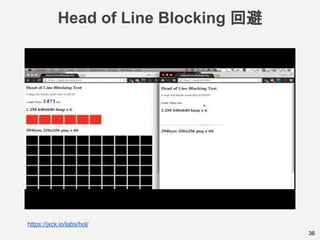
63. 64. 65. 66. TCP の限界
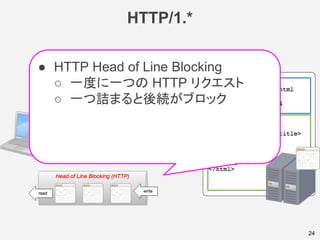
● TCP レベルの Head of Line Blocking
● 一本のコネクションに全て載せている
● パケットが一つ落ちると再送が発生
● コネクション全体が詰まる
66
TCP 自体は直せない
67. UDP それは最後の希望
67
● TCP 自体の問題
○ TCP 自体が持つ問題の解決は難しい
○ 別ポートプロトコルの普及は難しい
○ ミドルボックスを通れない
● UDP がある!!
○ UDP には良い意味で何も無い
○ そこに全て載せればいいのでは?
○ ポートも同じ、暗号化すればミドルボックスも通る
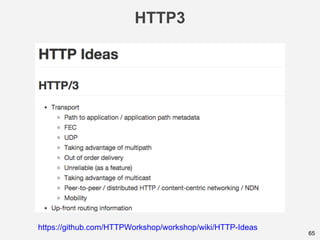
68. そして QUIC へ
● Head of Line Block を解消
● 0RTT での接続確立
● TLS 1.3 ベース
● 輻輳制御も独自に実装
● UDP 上に実装することで迅速なデプロイ
● TCP の限界を突破
68
HTTP2 over
QUIC over
UDP
69. 70. 71. 72. 73. 74. まとめ
● 今何が起こっているか
○ HTTP2 RFC が発行された
○ HTTP2 実装が進んでいる
○ エコシステムの芽も見え始めた
● これからどうなっていくのか
○ HTTP/1.1 が消える事は無い
○ HTTPS 化は止まらなそう
○ Web はまだまだ進化しそう
○ HTTP2 はそのうちのひとつ
○ そして QUIC へ
74
75. 76. Nginx ! Nginx ! Nginx !
76
by the end of 2015!!
すでに patch あり
http://nginx.org/patches/http2/
77. 78. 79. 80.