Android Studioの高機能化
IDEとしての機能拡張
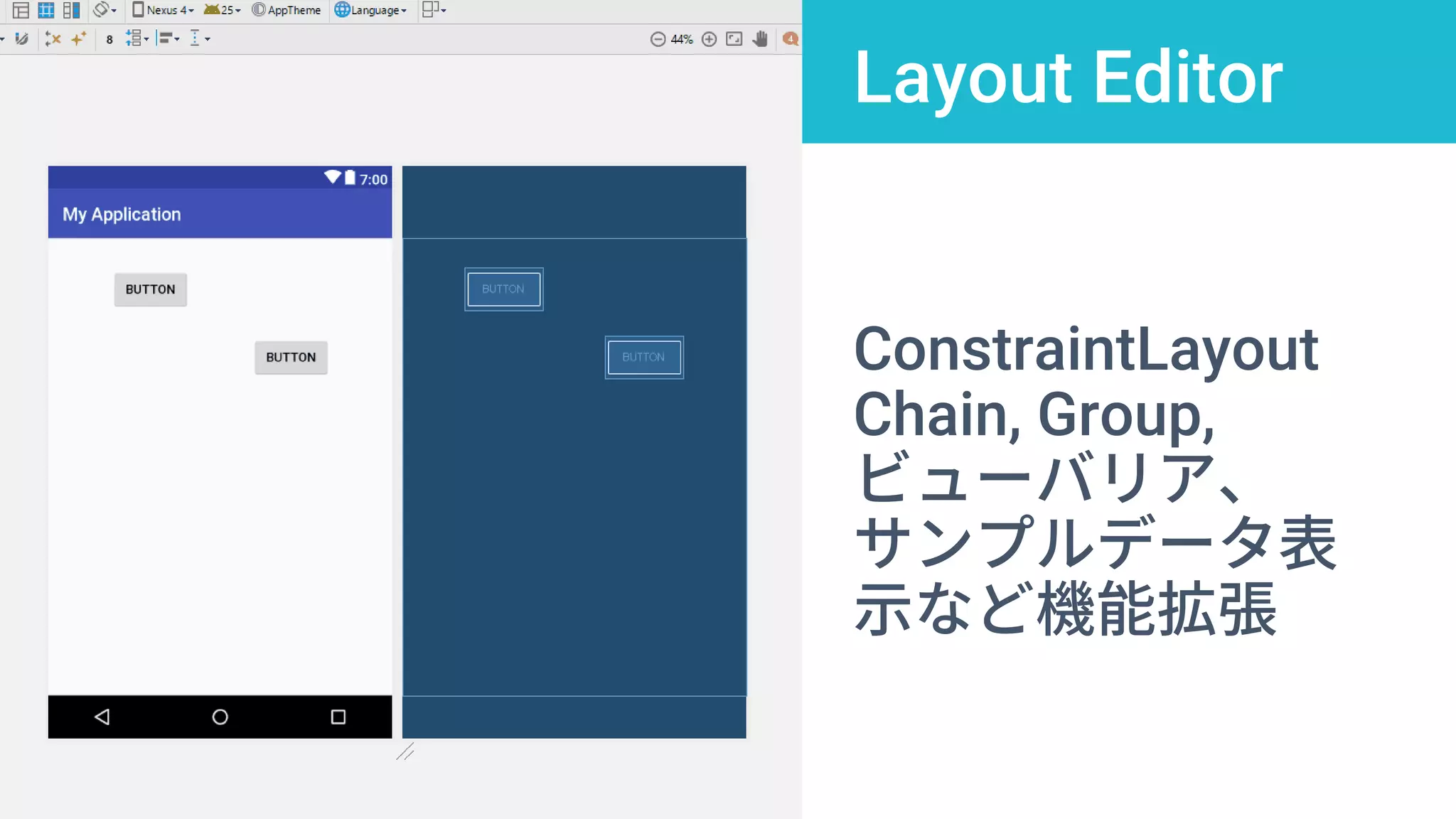
・New DesignTools
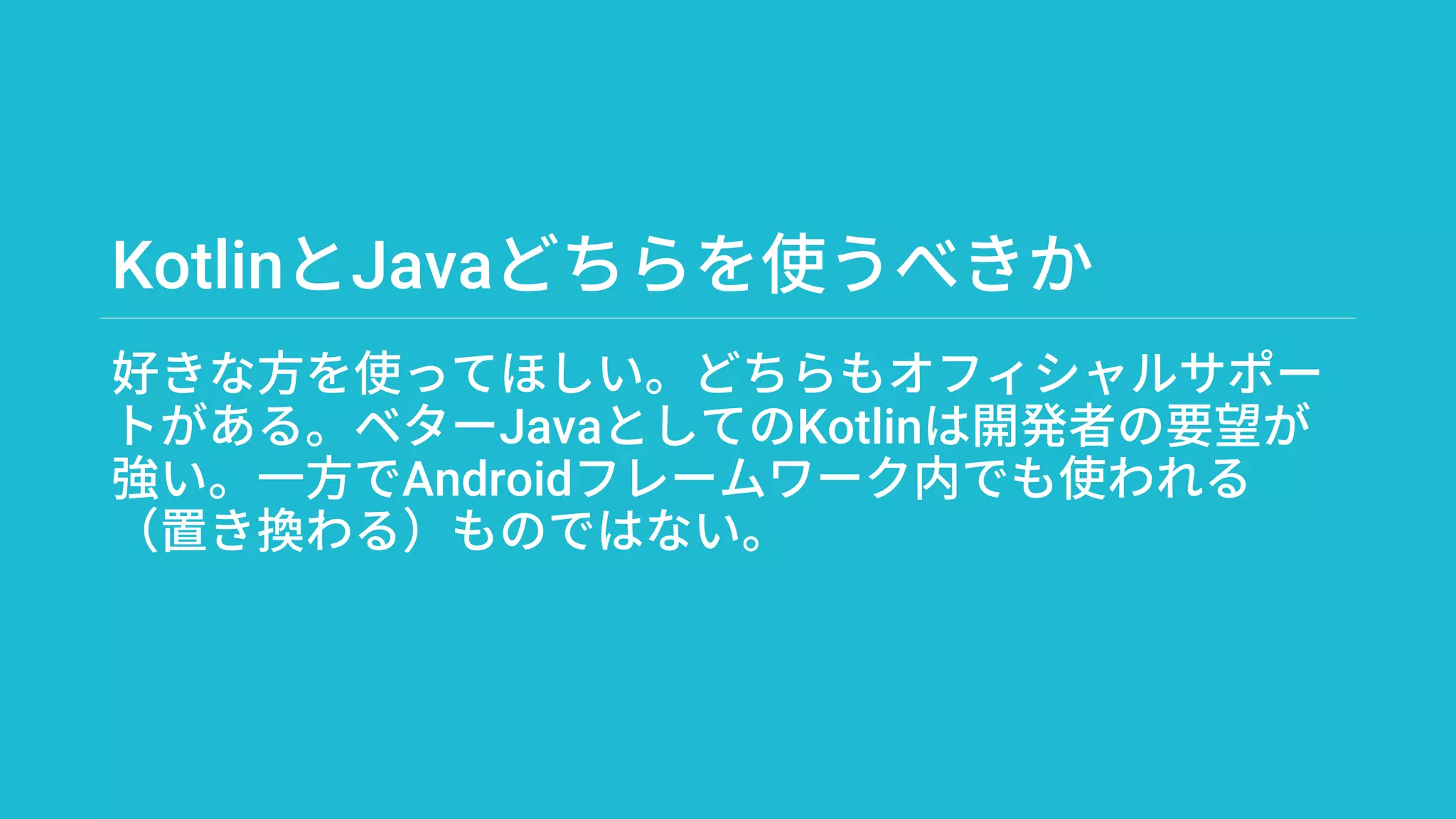
・Kotlin Support
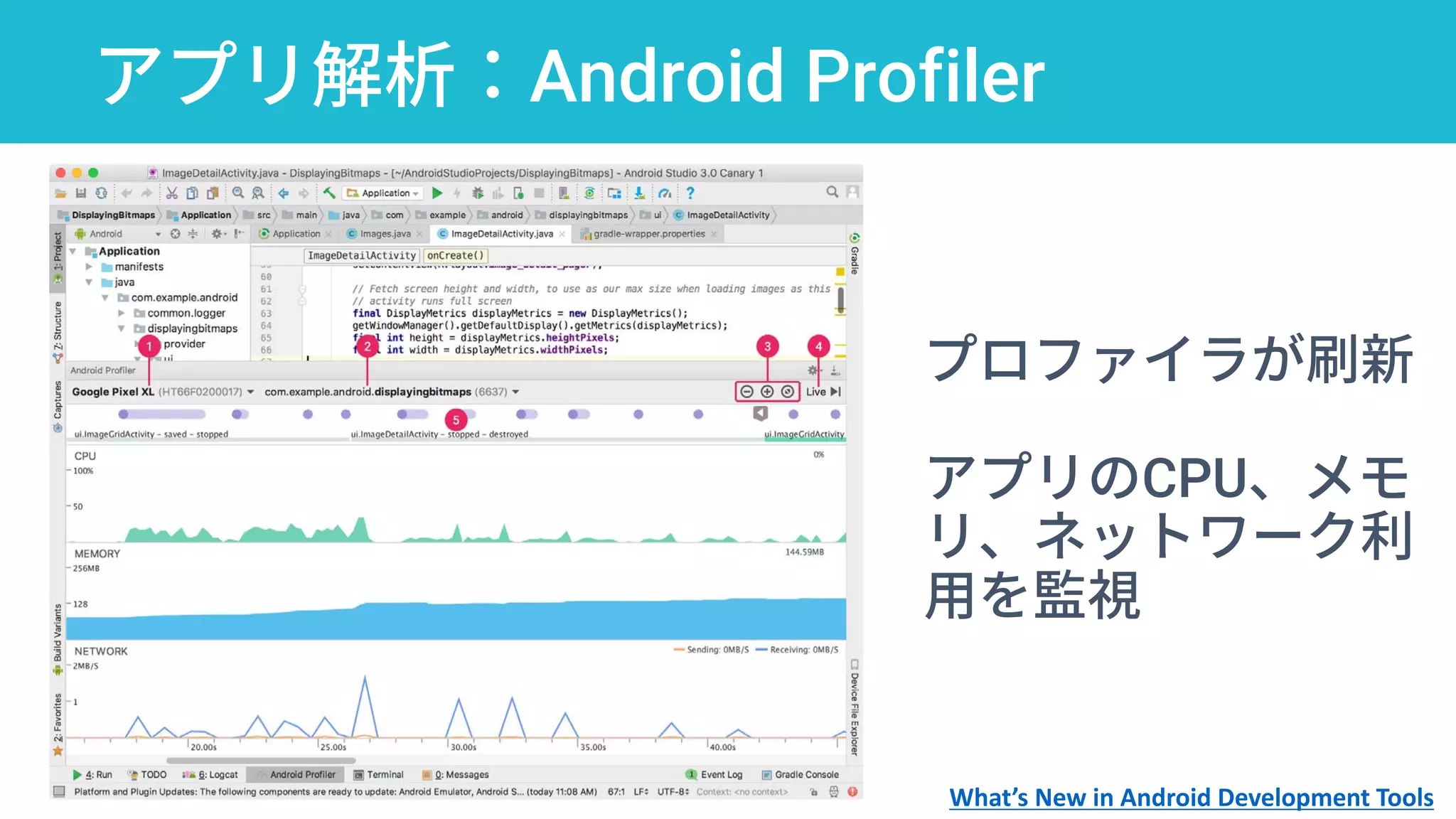
・Android Profiler
Androidプラットフォーム
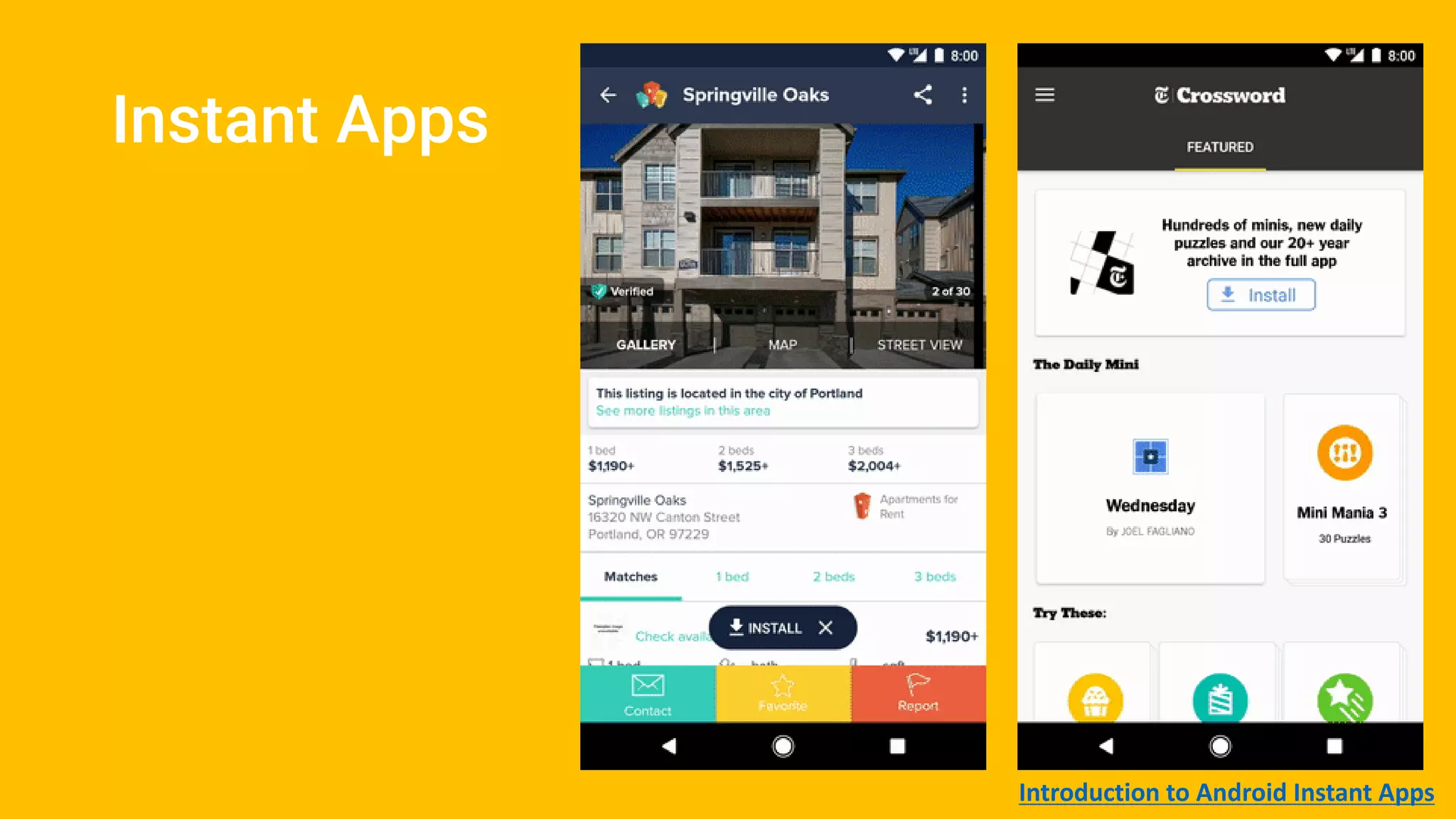
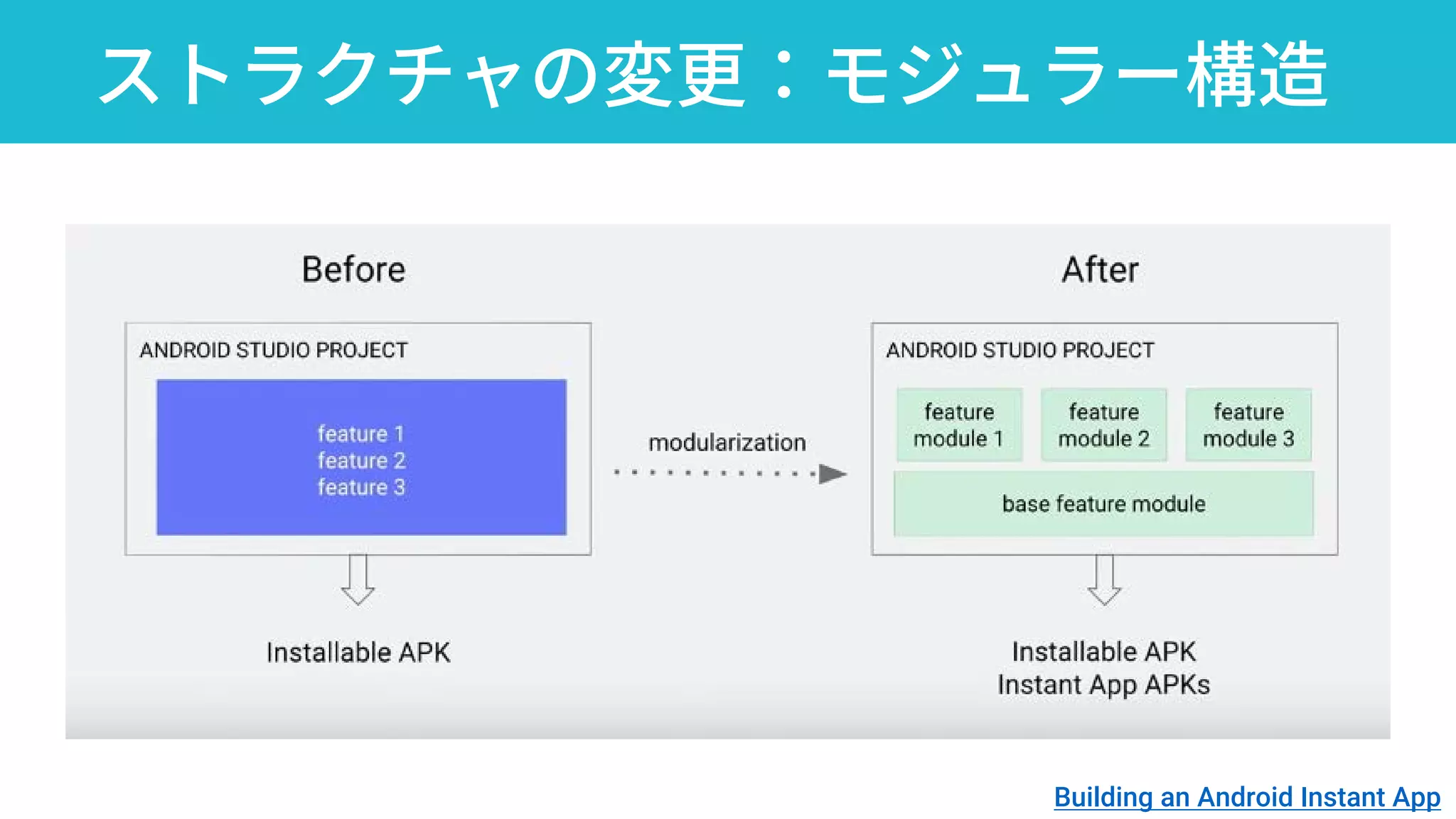
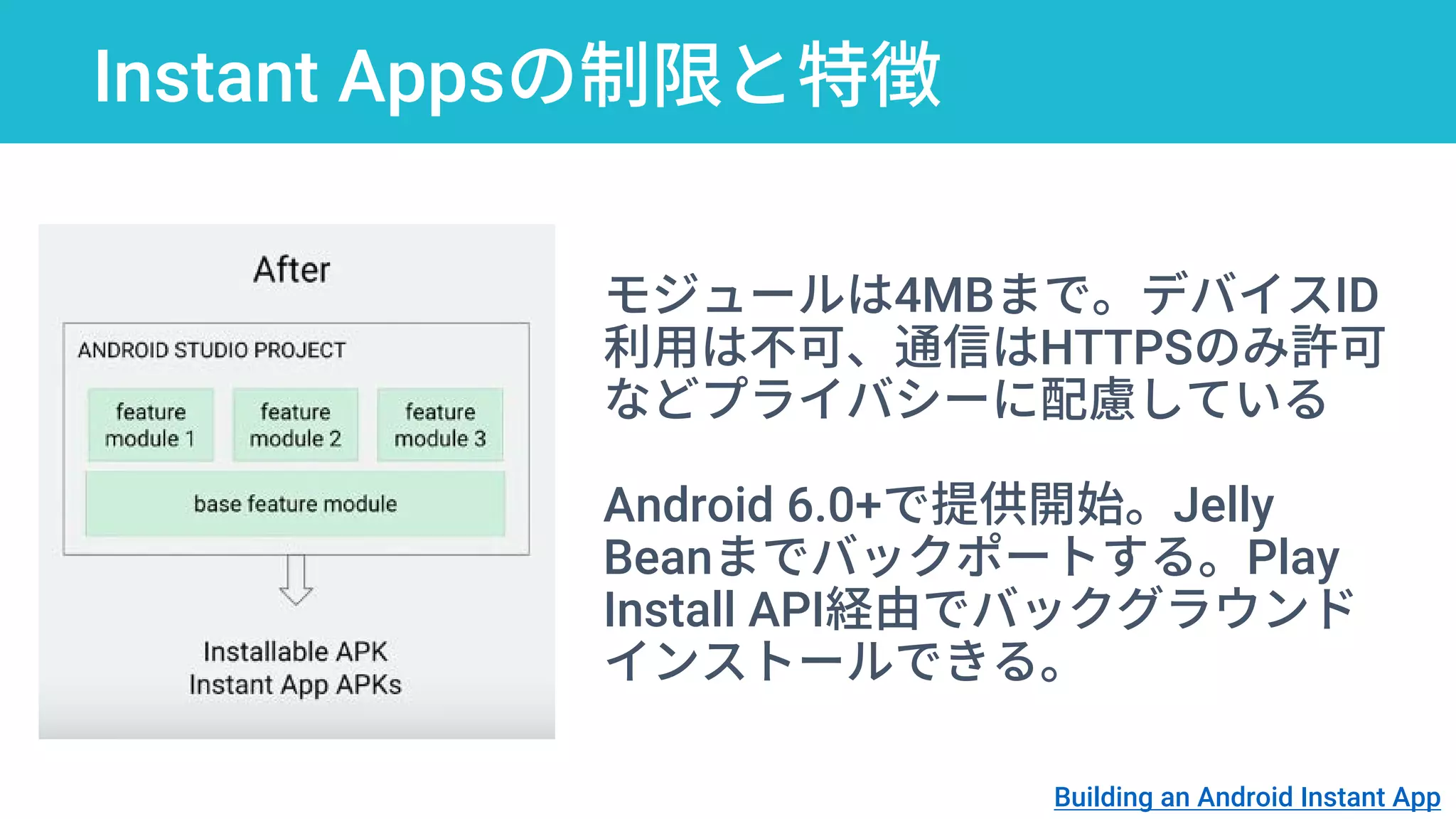
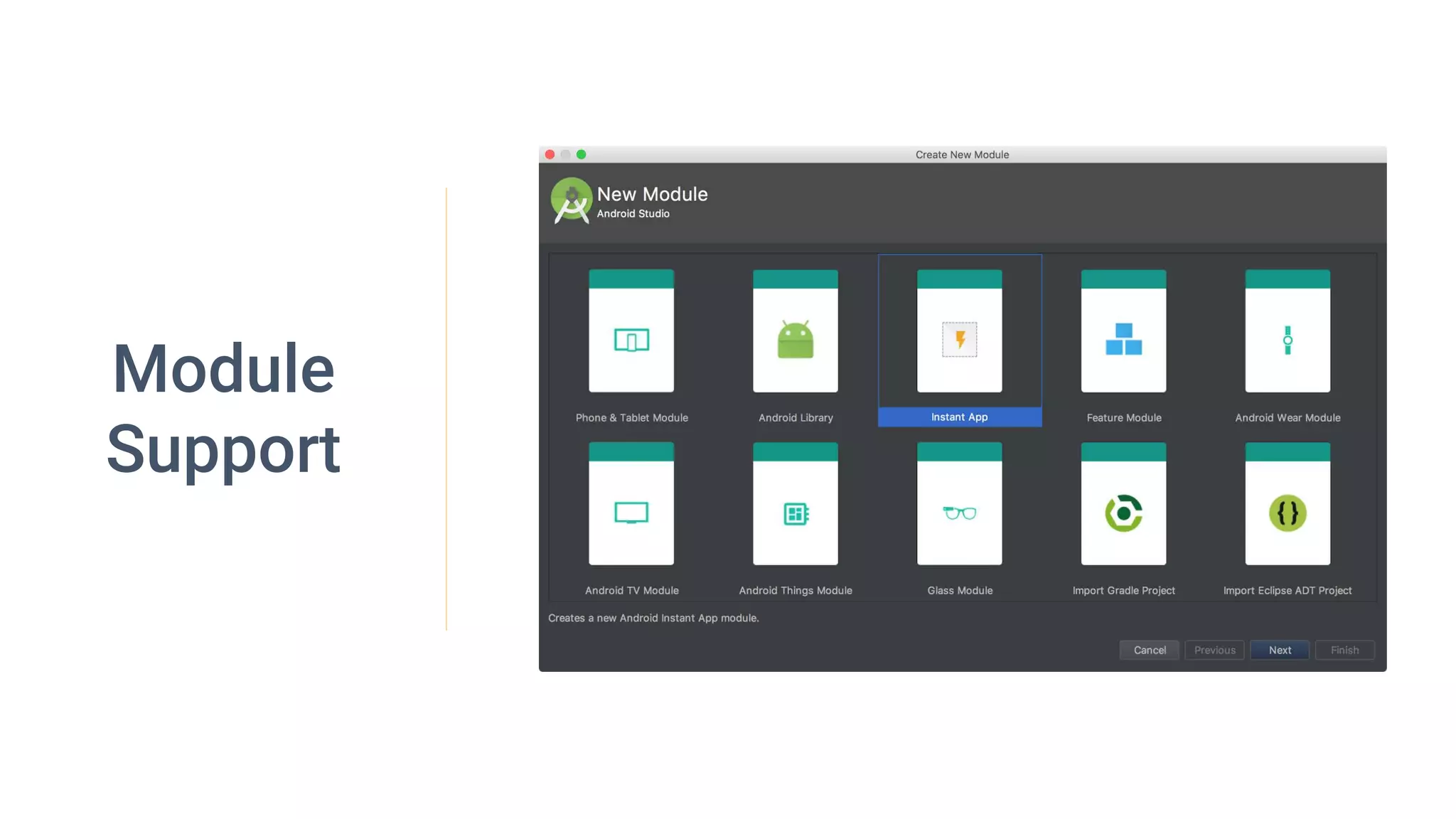
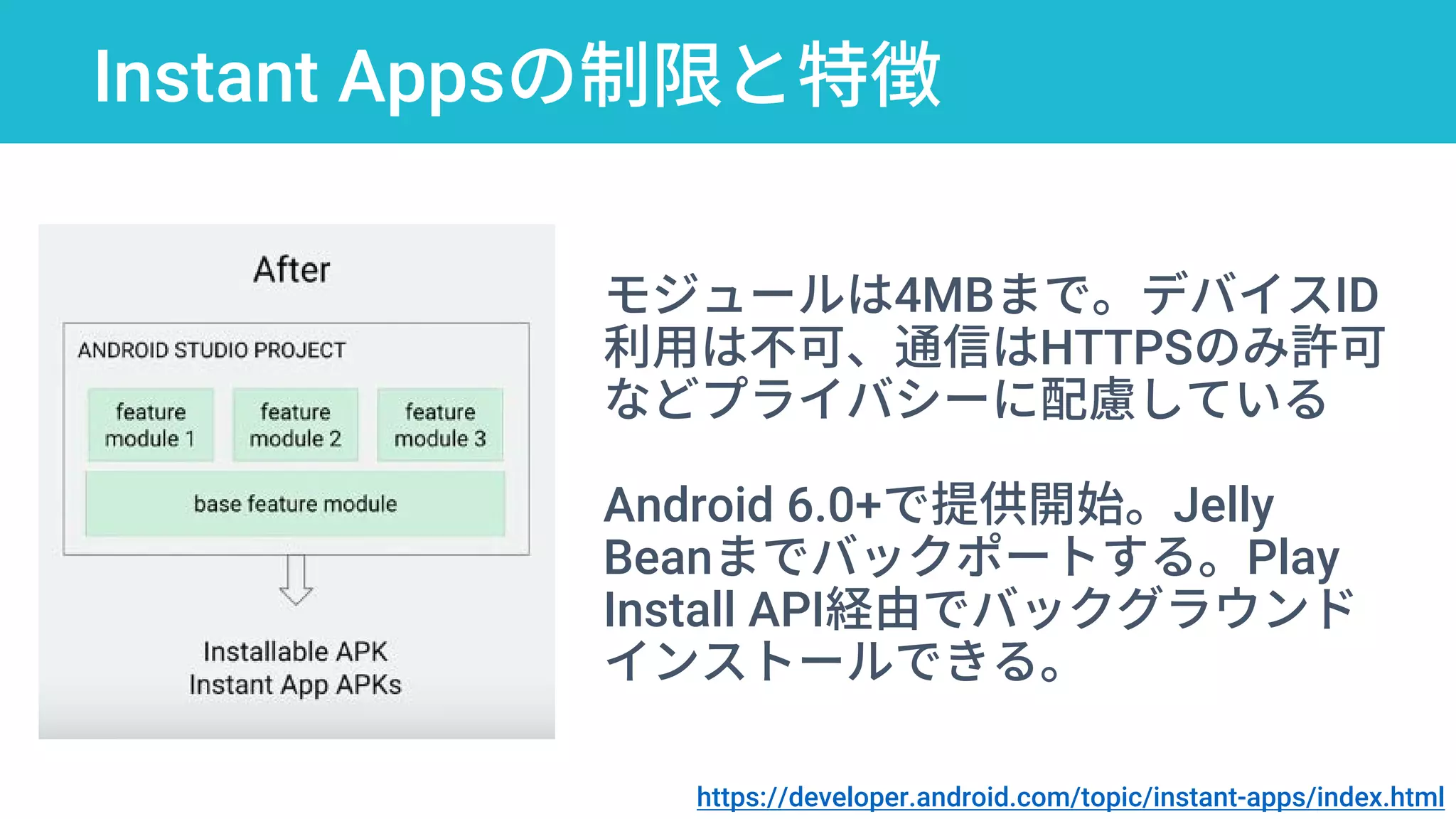
・Instant Apps and more
https://developer.android.com/studio/preview/index.html
What’s New in Android Development Tools
プロファイラで見るべき指標
10 Google PlayConsole Secrets to Optimize
Android Apps for Stellar User Retention
フレームレートに注意。16ms以
内のレンダリングが理想
0.1%のフレームが処理に700ms
かかるJunk Frame。Junkをなく
すことが体験向上に繋がる
10 Google Play Console Secrets to Optimize Android Apps for Stellar User Retention
Android Performance: An Overview、 Android Performance: UI
https://developer.android.com/topic/performance/vitals/render.html
45.
プロファイラの使い分け
10 Google PlayConsole Secrets to Optimize
Android Apps for Stellar User Retention
Systrace : アプリに影響なく、
システム全体を監視できるがア
プリ内の挙動は苦手
Android Profiler : アプリの挙動
が詳細に分かるが挙動が重くな
る















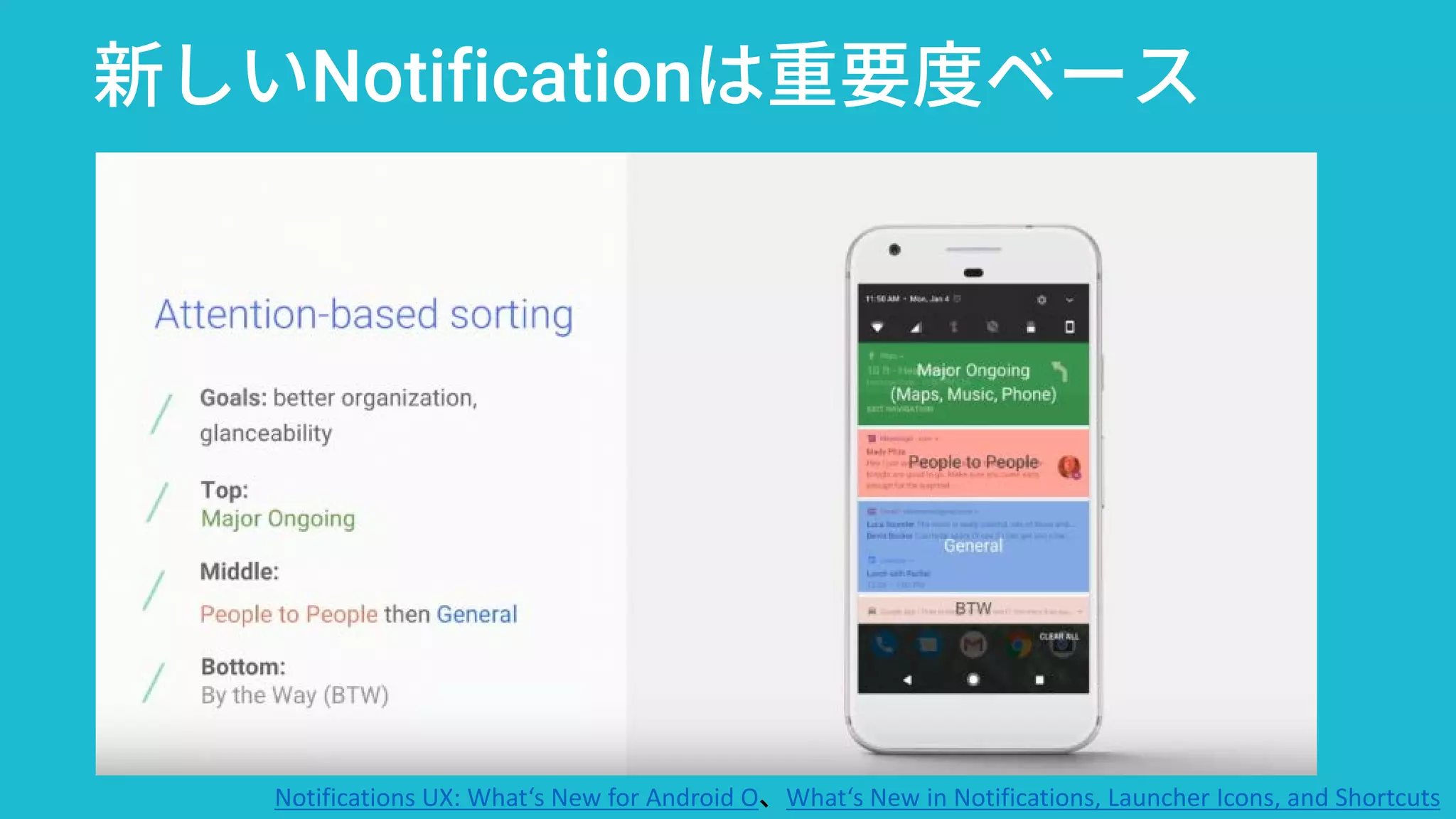
![通知の細分化が進む:Channelの作成
NotificationManager mNotificationManager =
(NotificationManager) getSystemService(Context.NOTIFICATION_SERVICE);
String id = “news_feed_channnel”;
CharSequence name = getString(“チャンネル名”);
String description = getString(“チャンネルの説明文”);
int importance = NotificationManager.IMPORTANCE_LOW;
NotificationChannel mChannel = new NotificationChannel(id, name, importance);
// チャンネルの設定
mChannel.setDescription(description);
mChannel.enableLights(true);
mChannel.setLightColor(Color.BLUE);
mChannel.enableVibration(true);
mChannel.setVibrationPattern(new long[]{100, 200});
mNotificationManager.createNotificationChannel(mChannel);](https://image.slidesharecdn.com/googleioextendedandroidoandandroidstudio-170610035723/75/Google-I-O-2017-Extended-Android-O-And-Android-Studio-33-2048.jpg)







![[ABC2012S]Android2x/3x/4x対応アプリ開発Tips](https://cdn.slidesharecdn.com/ss_thumbnails/abc2012sandroid234kanbara-120324082804-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






























