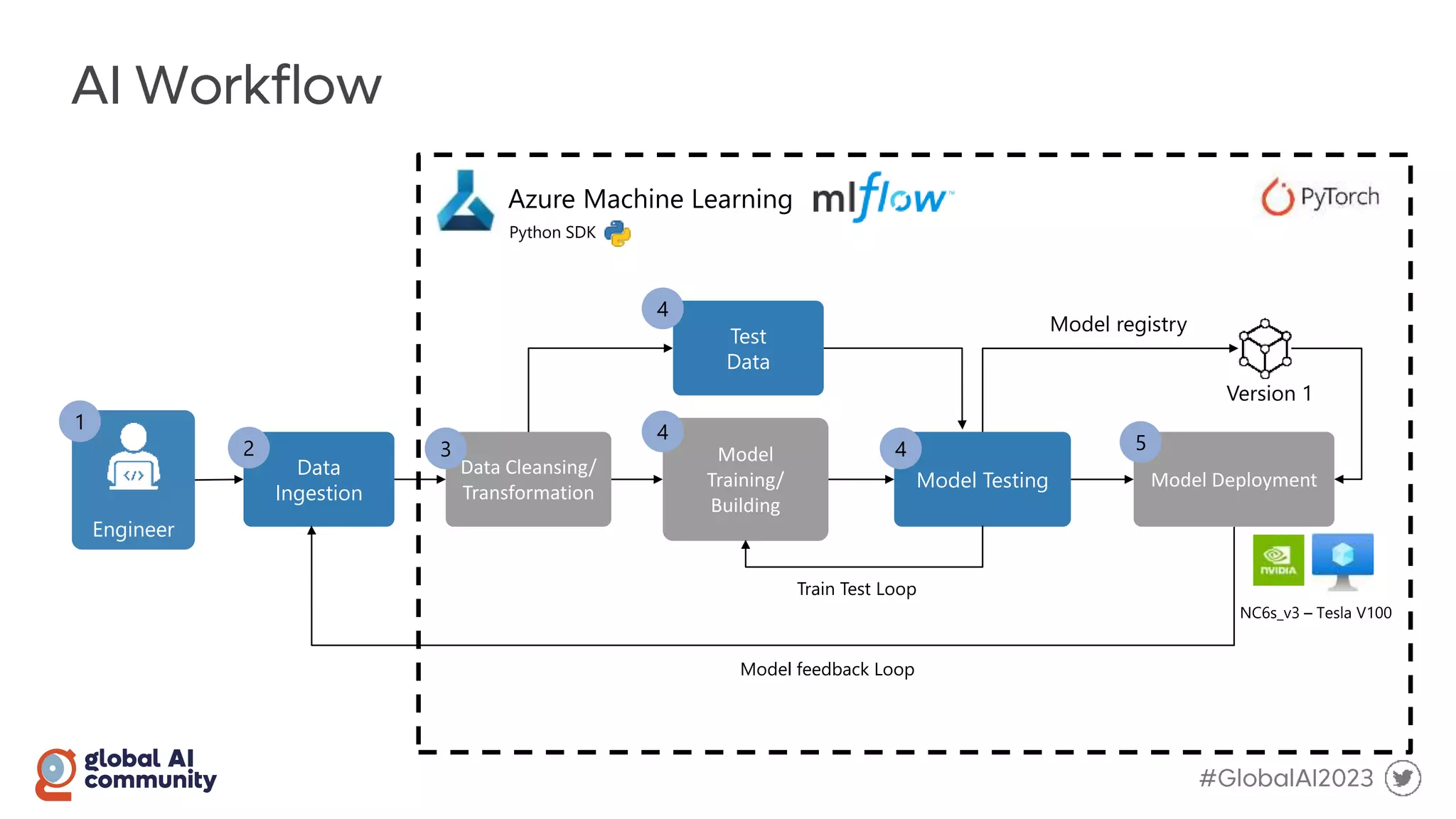
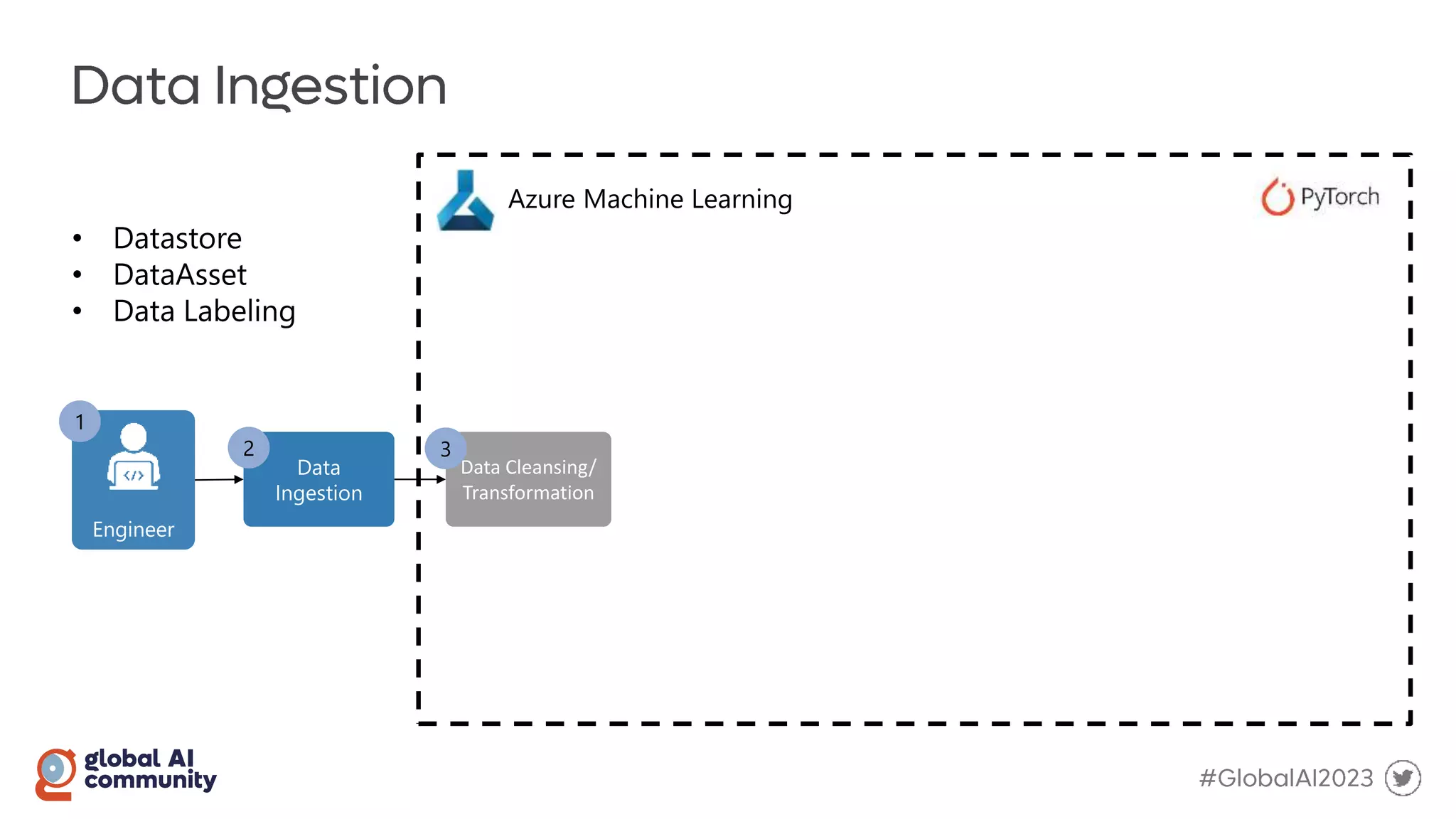
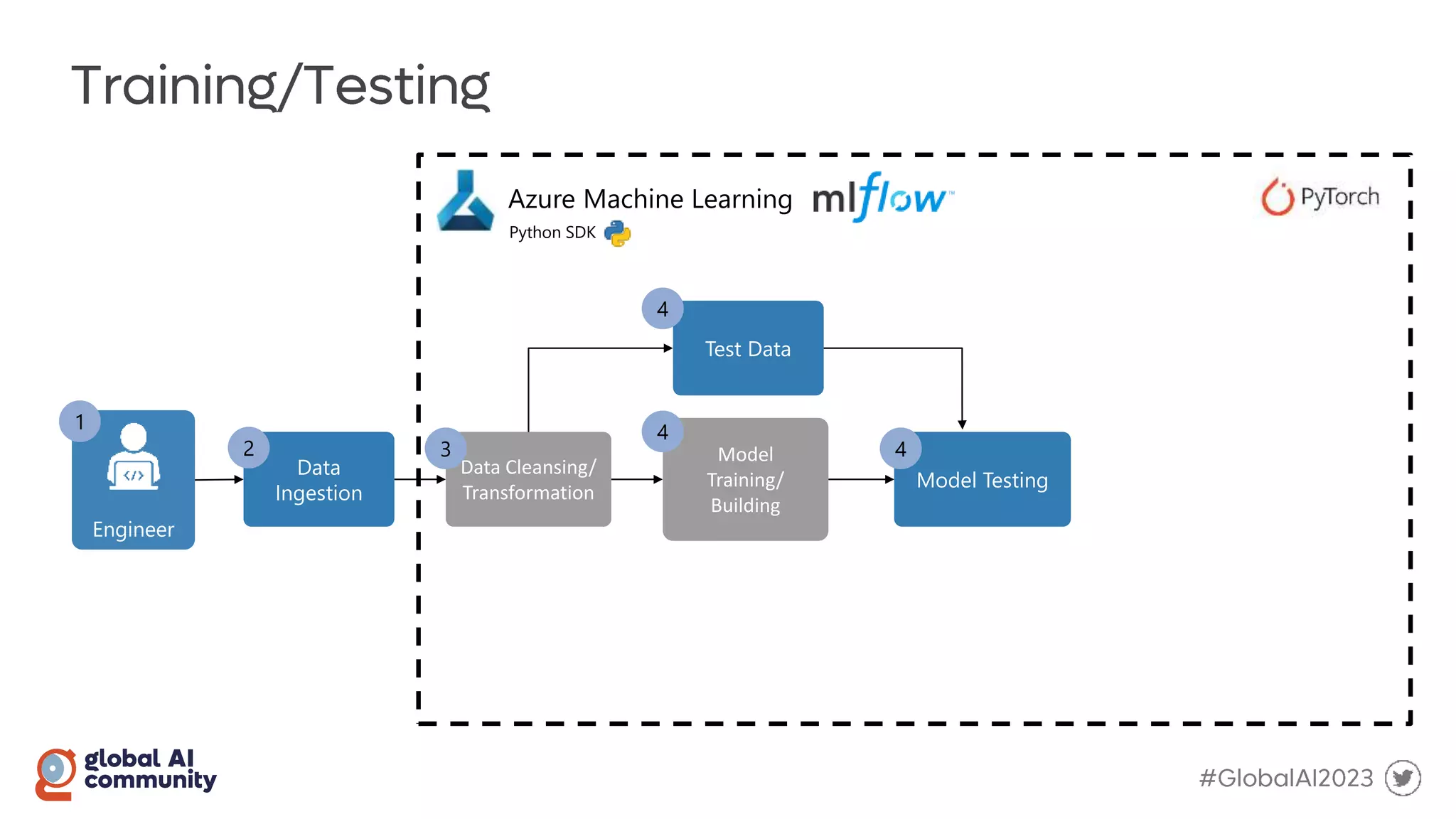
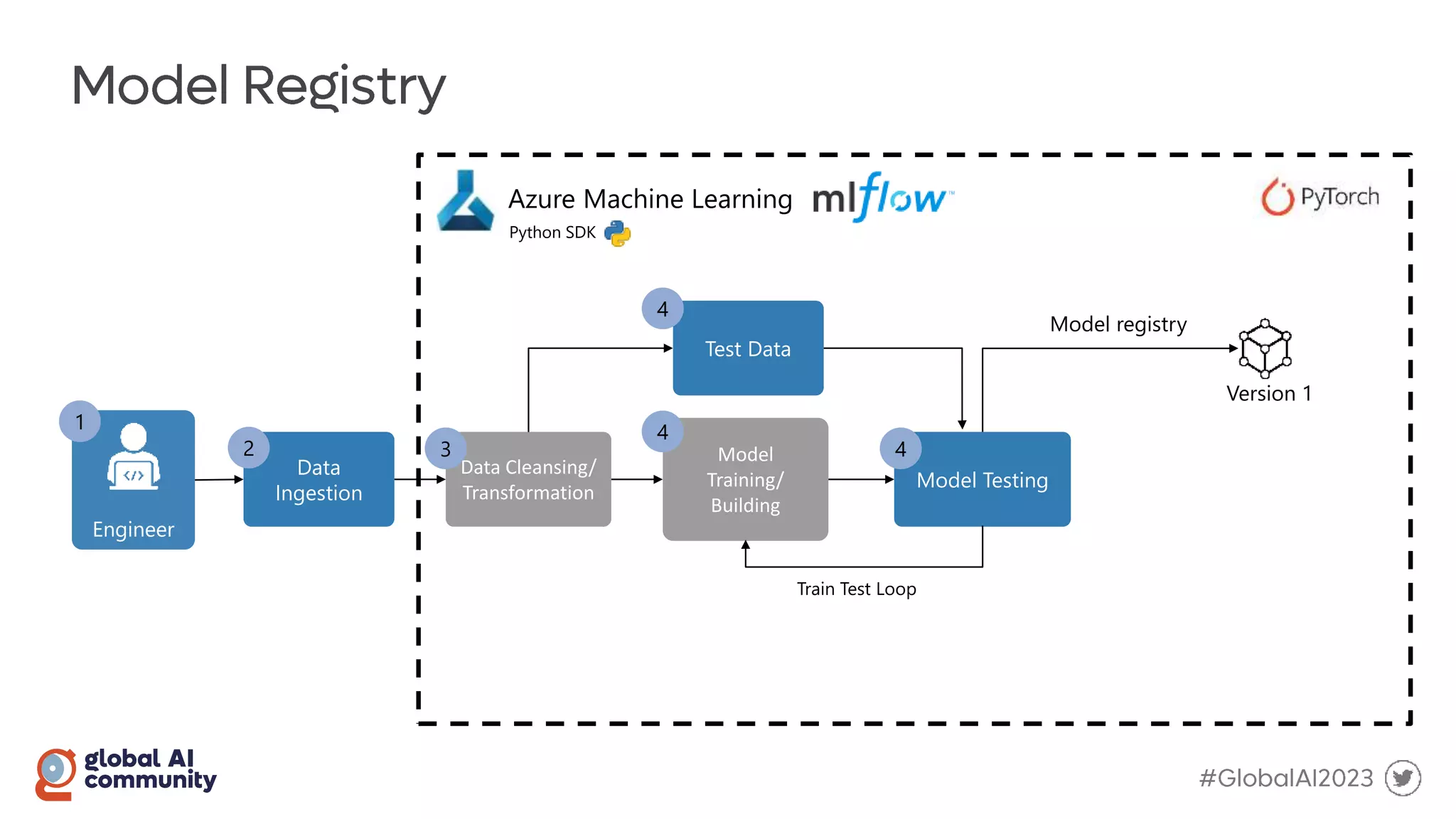
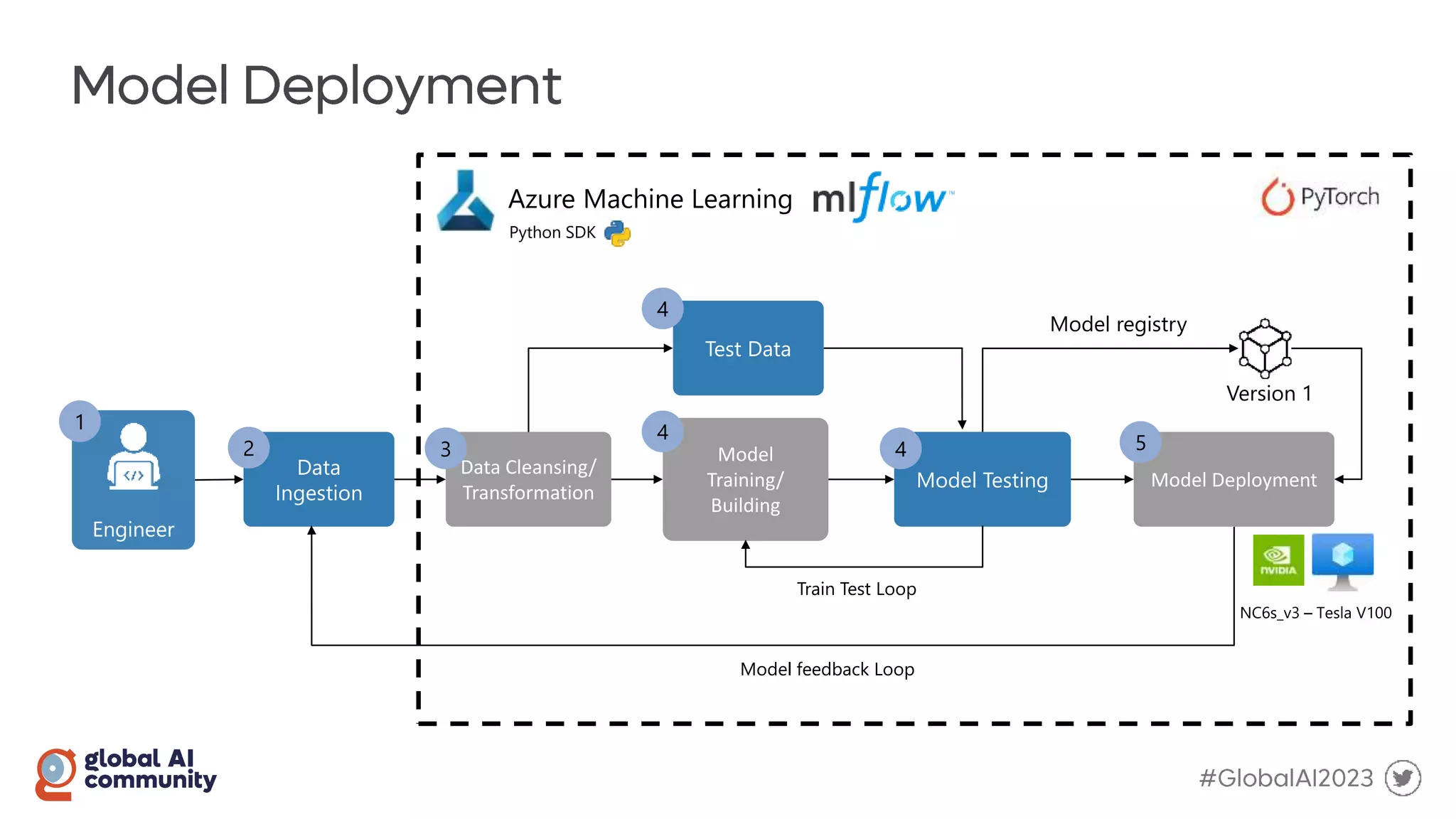
The document discusses the Global AI Bootcamp which will take place from March 2nd to 4th 2023. It outlines the typical machine learning workflow including data ingestion, data cleansing, model training and building, model testing, and model deployment. It also mentions using Azure Machine Learning for the model registry and train/test loops, with feedback loops and the Python SDK. Precision and AUC are also briefly discussed.
















































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

















