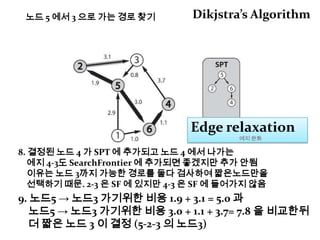
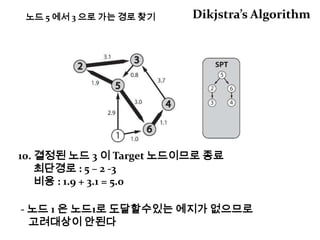
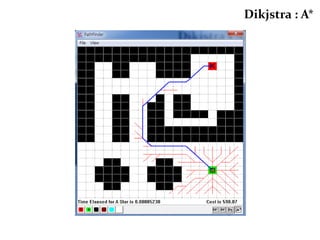
Dijkstra Algorithm A*WARNING!Beware!Search algorithms have the ability to create in the average humanbrain terrible amounts of frustration and confusion, leading to headaches,nausea, and sleep deprivation. Spontaneous and excessive howling is not uncommon. Please be aware these symptoms are commonplace in the earlystages of the learning curve and are not generally cause for concern. Normal service is usually resumed within a reasonable length of time. (If symptoms persist, however, stay clear of busy roads, razor blades, andloaded weapons. Seek medical advice at the earliest opportunity.)경고! 탐색 알고리즘은 수많은 좌절과 혼동으로, 두통, 메스꺼움, 수면 결핍을 통하여 보통 사람의 두뇌로 생성될 수 있다. 자발적이고 과도한 울부짖음은 보통이다.이러한 증상은 배우는 초기 단계에서 동반되는 것으로 일반적으로 관심을 끌지 못함에 유의한다.보통의 서비스는 대개 합리적인 시간 내에 재개된다. ( 그러나 증상이 계속 된다면, 복잡한 도로, 레이저날, 장착된 무기를 제거하고, 기회가 있을 때 빨리 의사를 찾아간다)
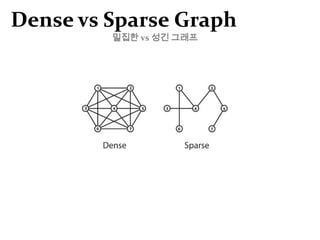
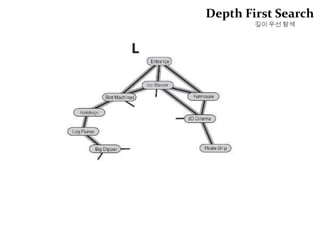
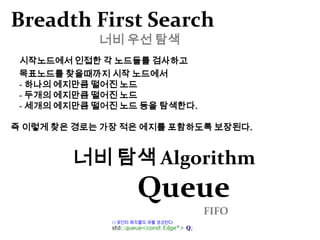
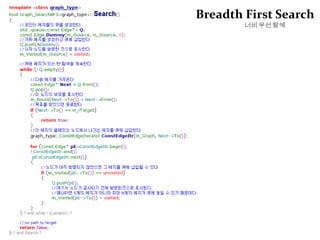
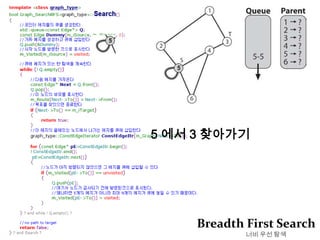
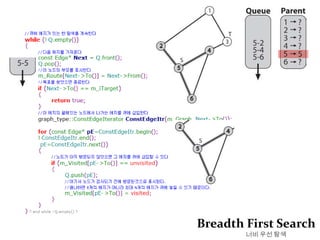
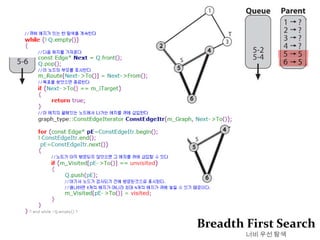
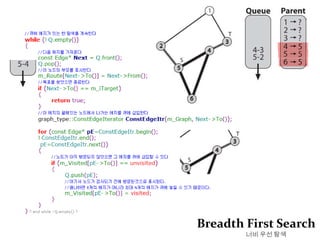
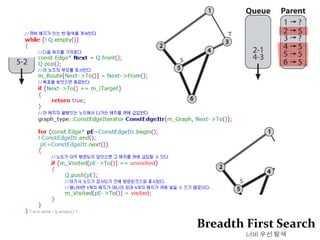
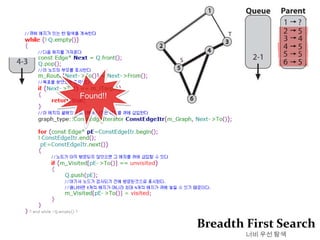
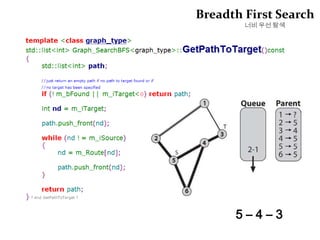
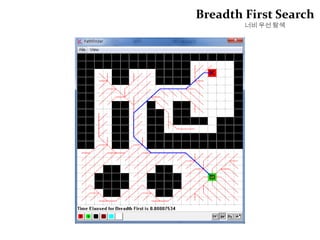
Dijkstra Algorithm A*BreadthFirst Search너비 우선 탐색시작노드에서 인접한 각 노드들를 검사하고목표노드를 찾을때까지 시작 노드에서 - 하나의 에지만큼 떨어진 노드 - 두개의 에지만큼 떨어진 노드 - 세개의 에지만큼 떨어진 노드 등을 탐색한다.즉 이렇게 찾은 경로는 가장 적은 에지를 포함하도록 보장된다.너비 탐색 AlgorithmQueue FIFO

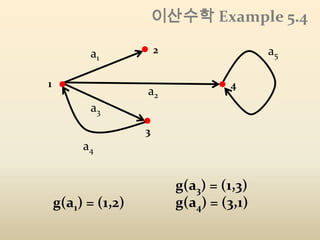

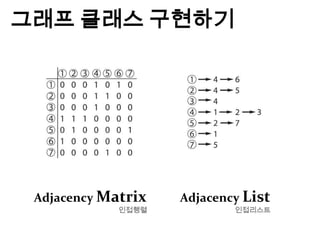

![이산수학그래프에 대한 컴퓨터 표현방식인접 행렬adjacency matrix]A = [11 1 - 11 - 1 -- 1 - 11 - 1 -234행렬 원소 (1,1) 의 값 1 은 노드1 에서의 루프를 나타낸다모든 무방향성 그래프의 인접행렬은 대칭적이다.](https://image.slidesharecdn.com/aich5-100502093835-phpapp02/85/5-Programming-Game-AI-by-Example-30-320.jpg)





![[데브루키]노대영_알고리즘 스터디](https://cdn.slidesharecdn.com/ss_thumbnails/devrookiealgorithm-180926091907-thumbnail.jpg?width=640&height=640&fit=bounds)

![[NDC 2009] 행동 트리로 구현하는 인공지능](https://cdn.slidesharecdn.com/ss_thumbnails/sozq6jekqxsztuufax7q-signature-36c67eff9cc876072bc7cbb8cc904a6ded5de90832dee56b9f72b022c381012d-poli-150121233510-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)


















![[페차쿠차] 배움의 기술](https://cdn.slidesharecdn.com/ss_thumbnails/artoflearningupload-100901083140-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)











![[1113 박민수]a star_알고리즘](https://cdn.slidesharecdn.com/ss_thumbnails/1113astar-101115060336-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Swift] Data Structure - Graph(BFS)](https://cdn.slidesharecdn.com/ss_thumbnails/swiftdatastructure-graphbfs-200603005912-thumbnail.jpg?width=640&height=640&fit=bounds)