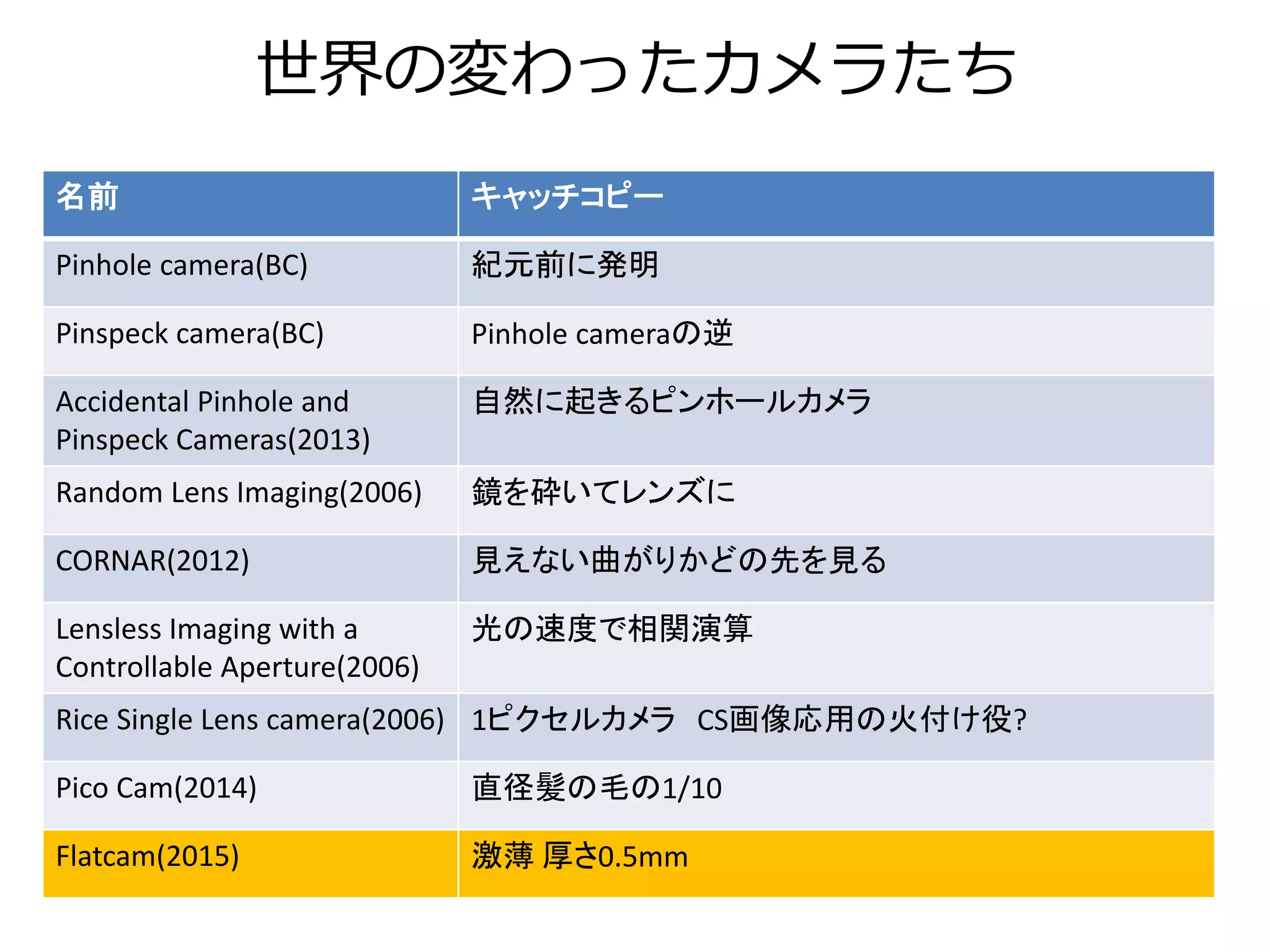
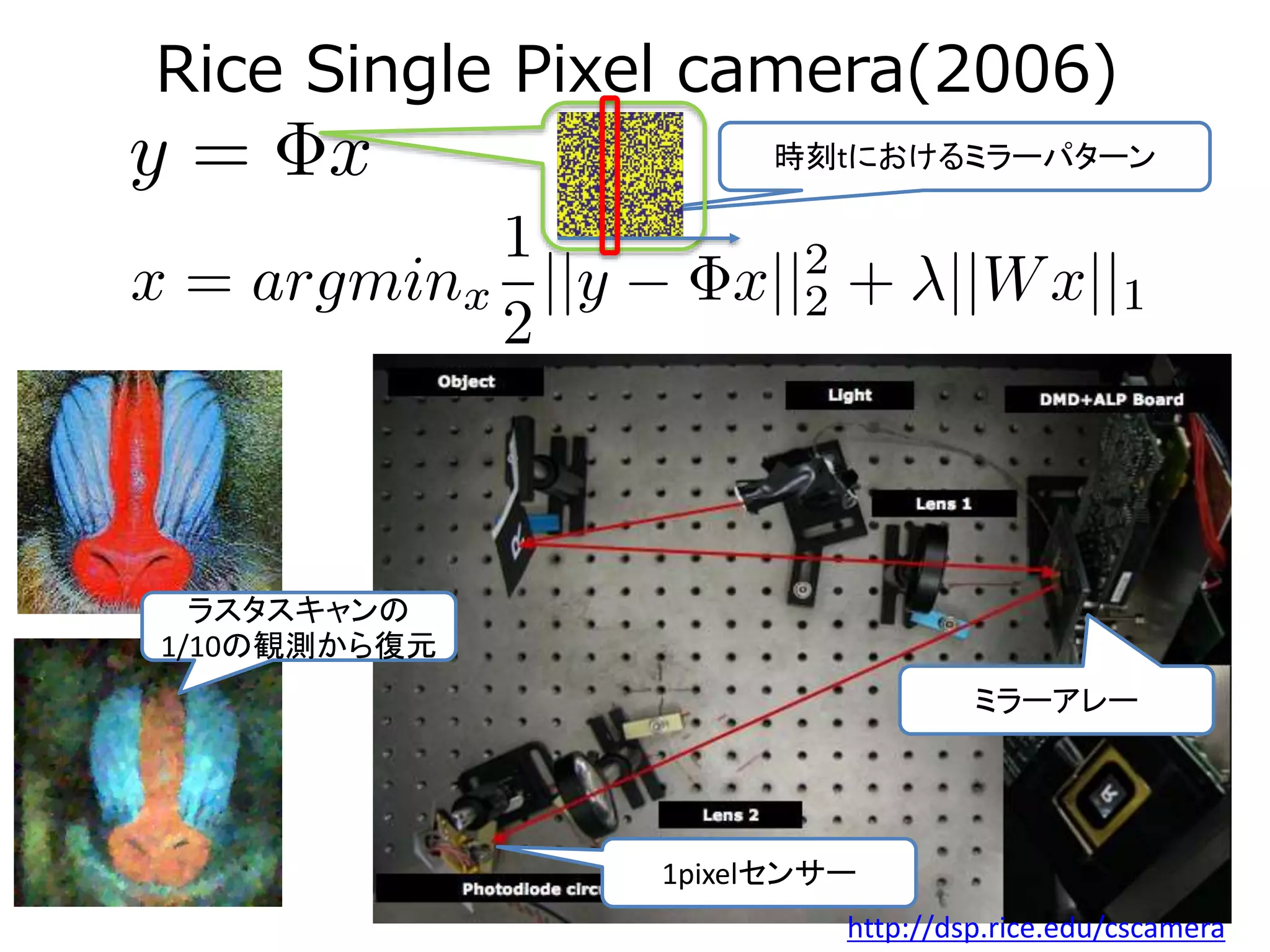
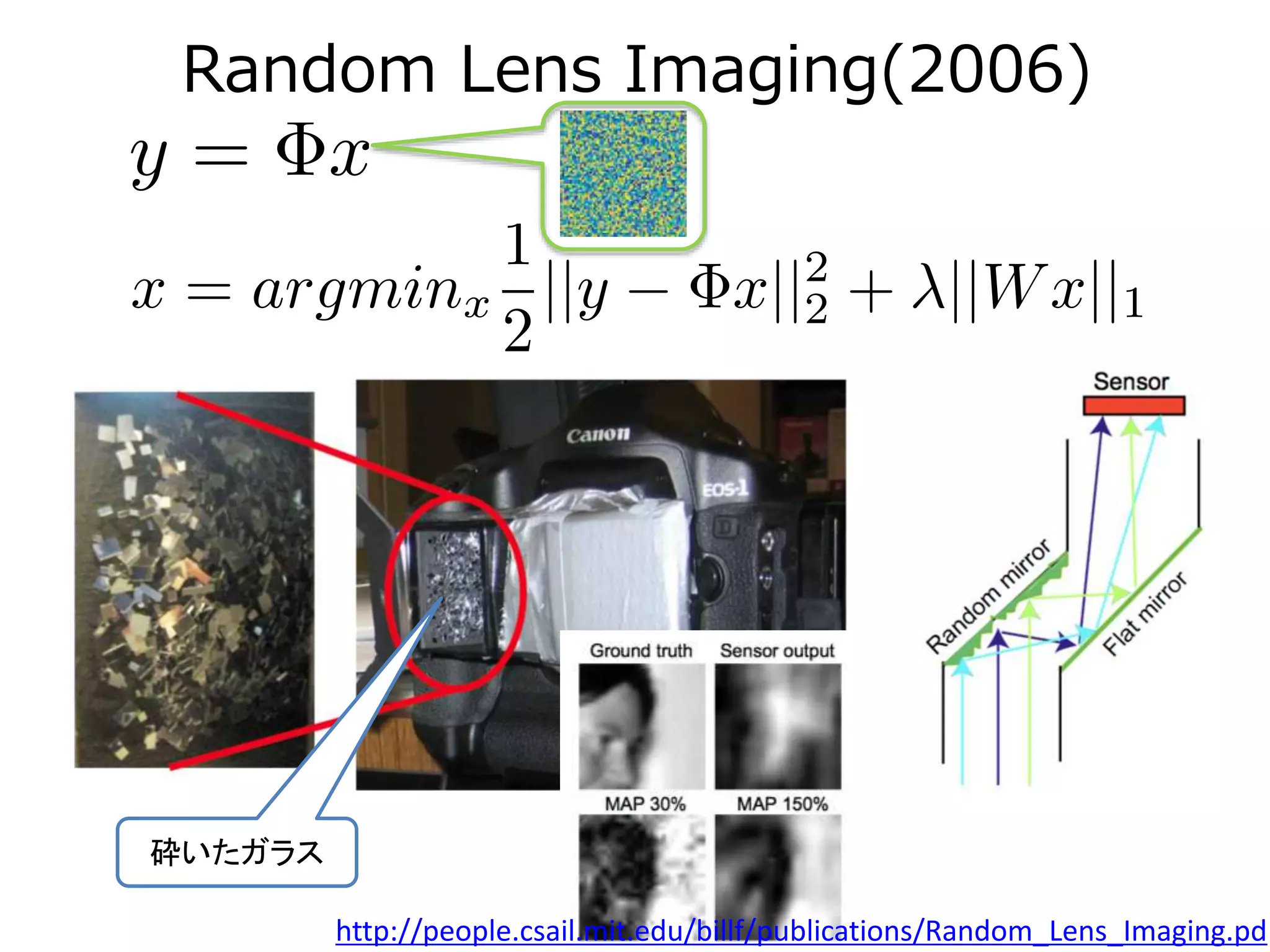
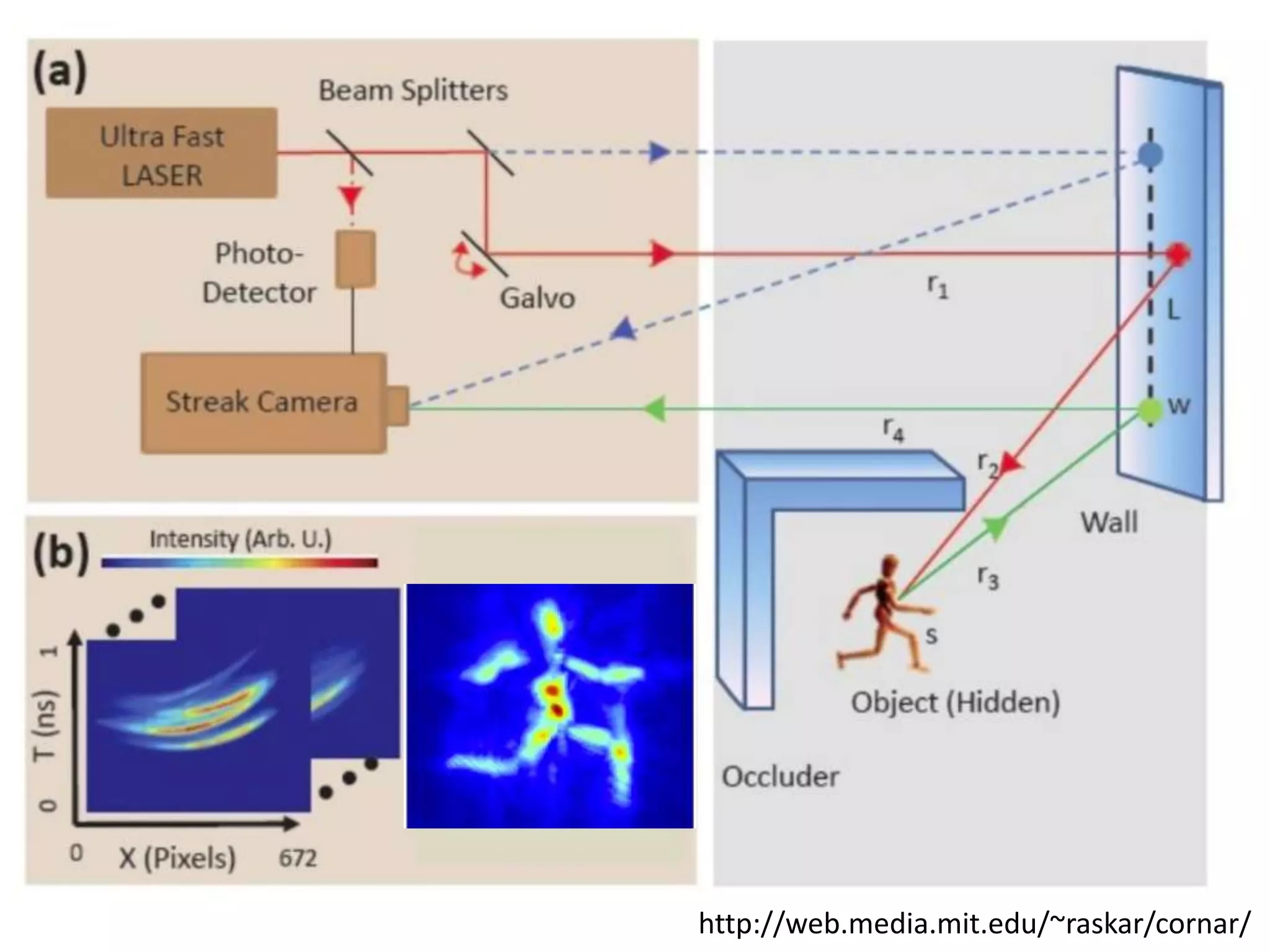
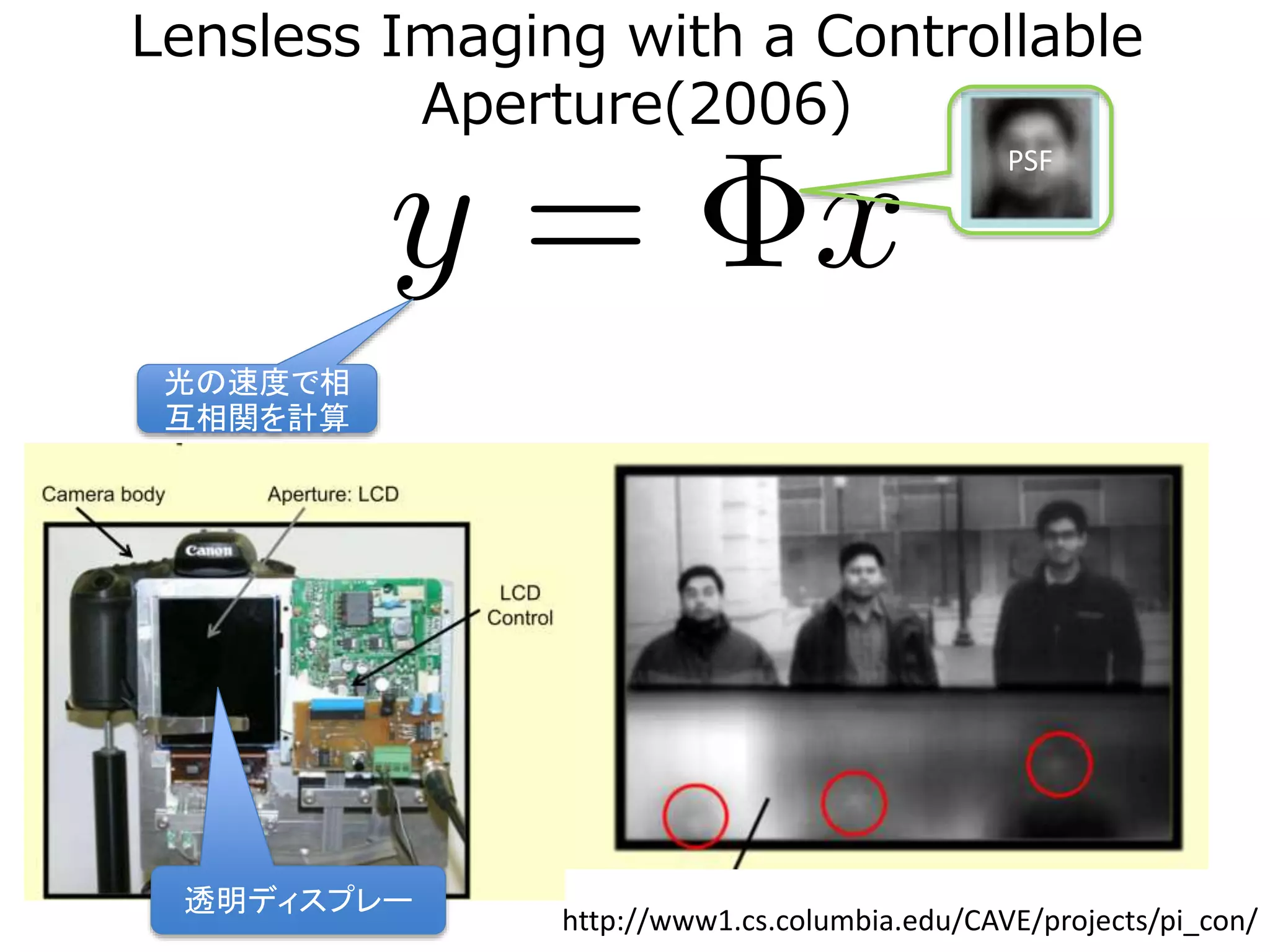
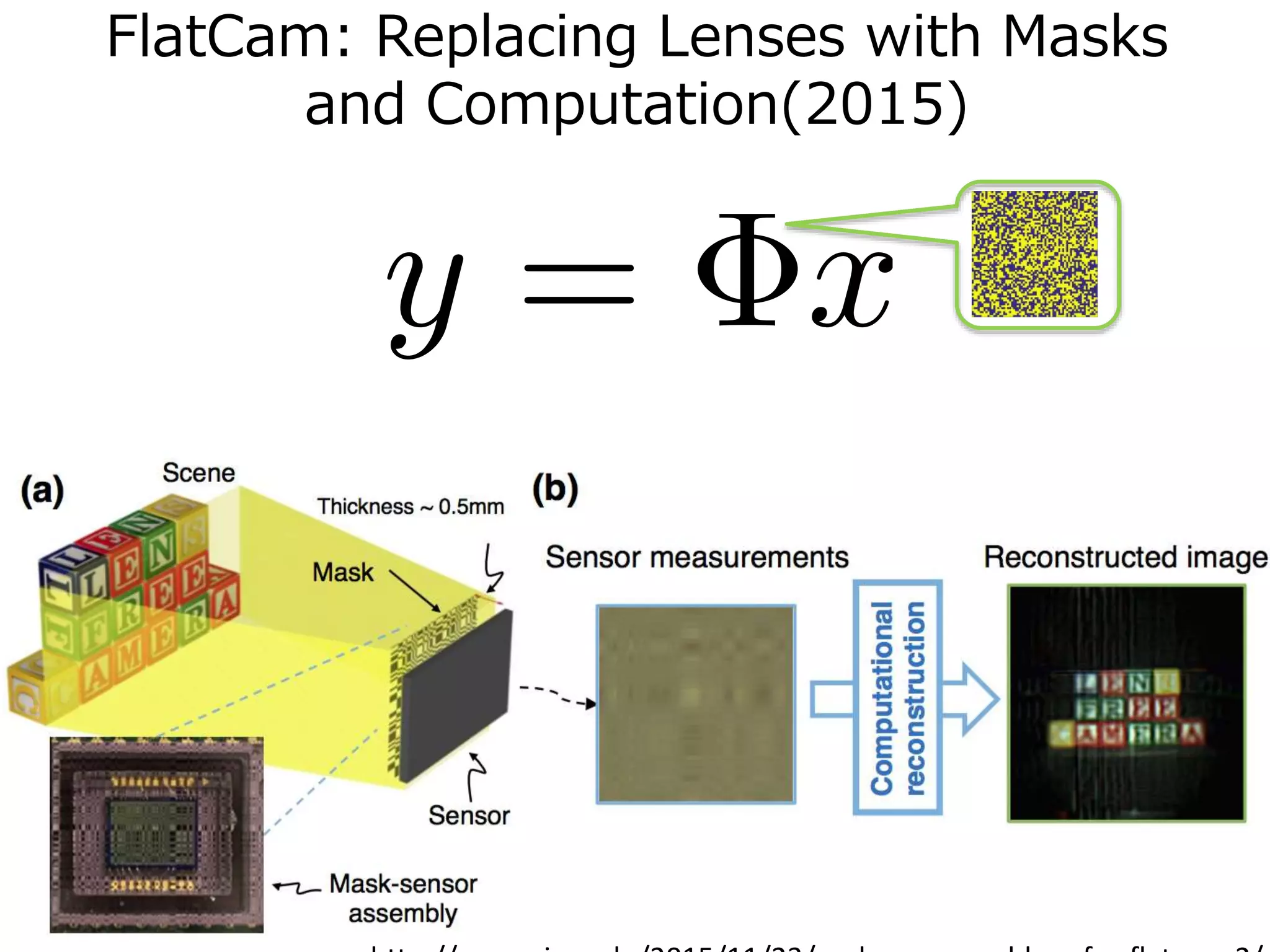
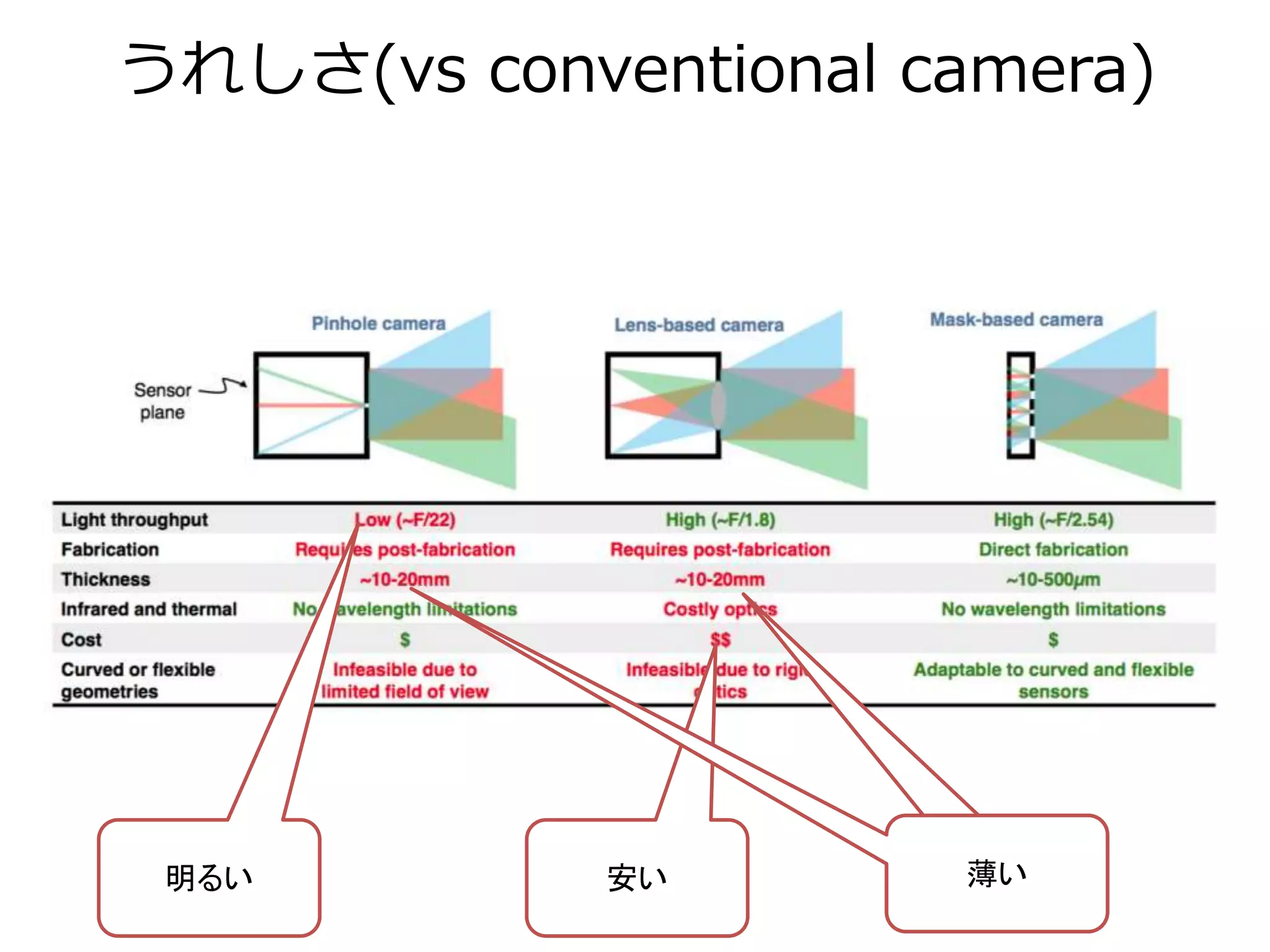
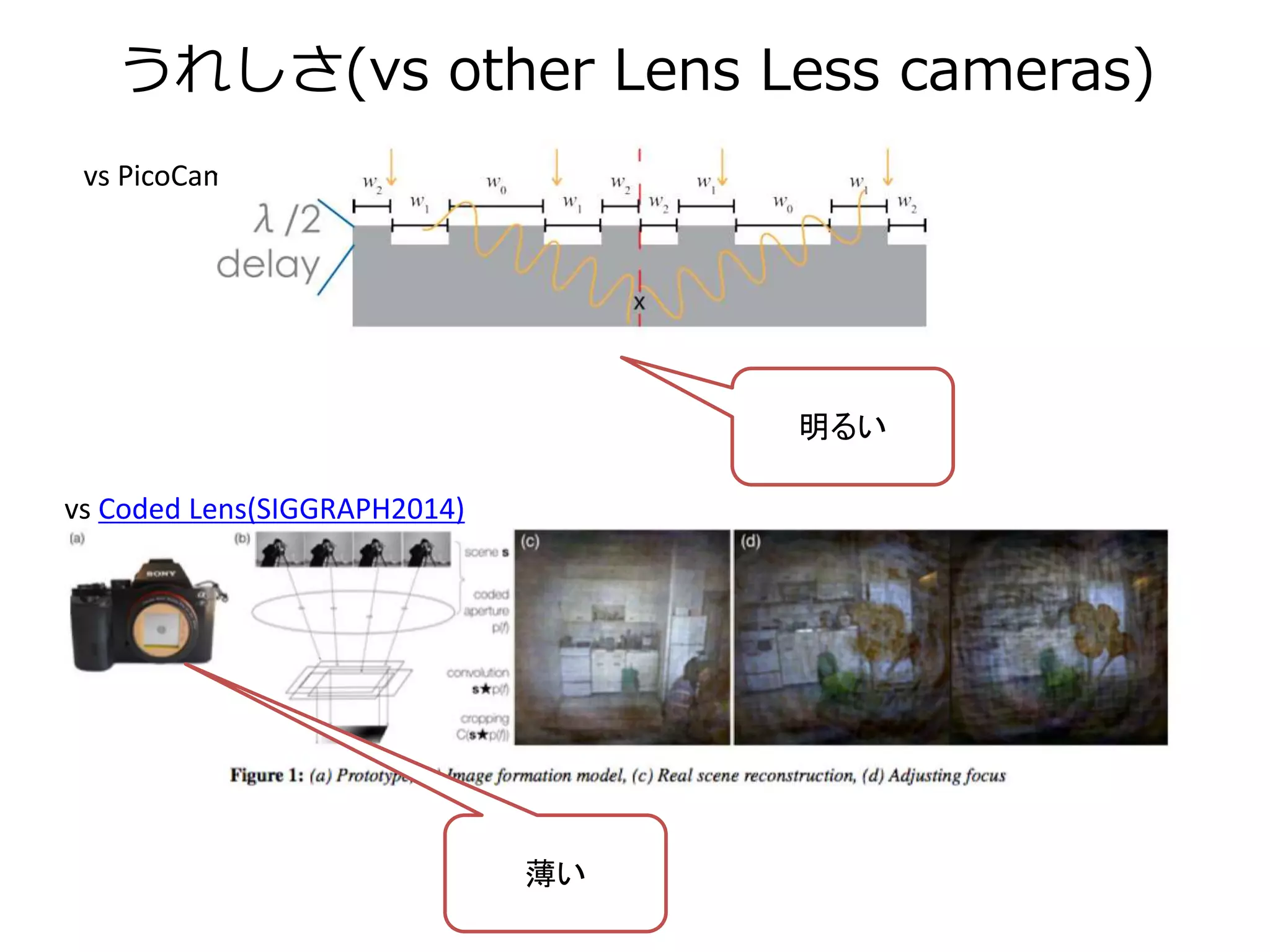
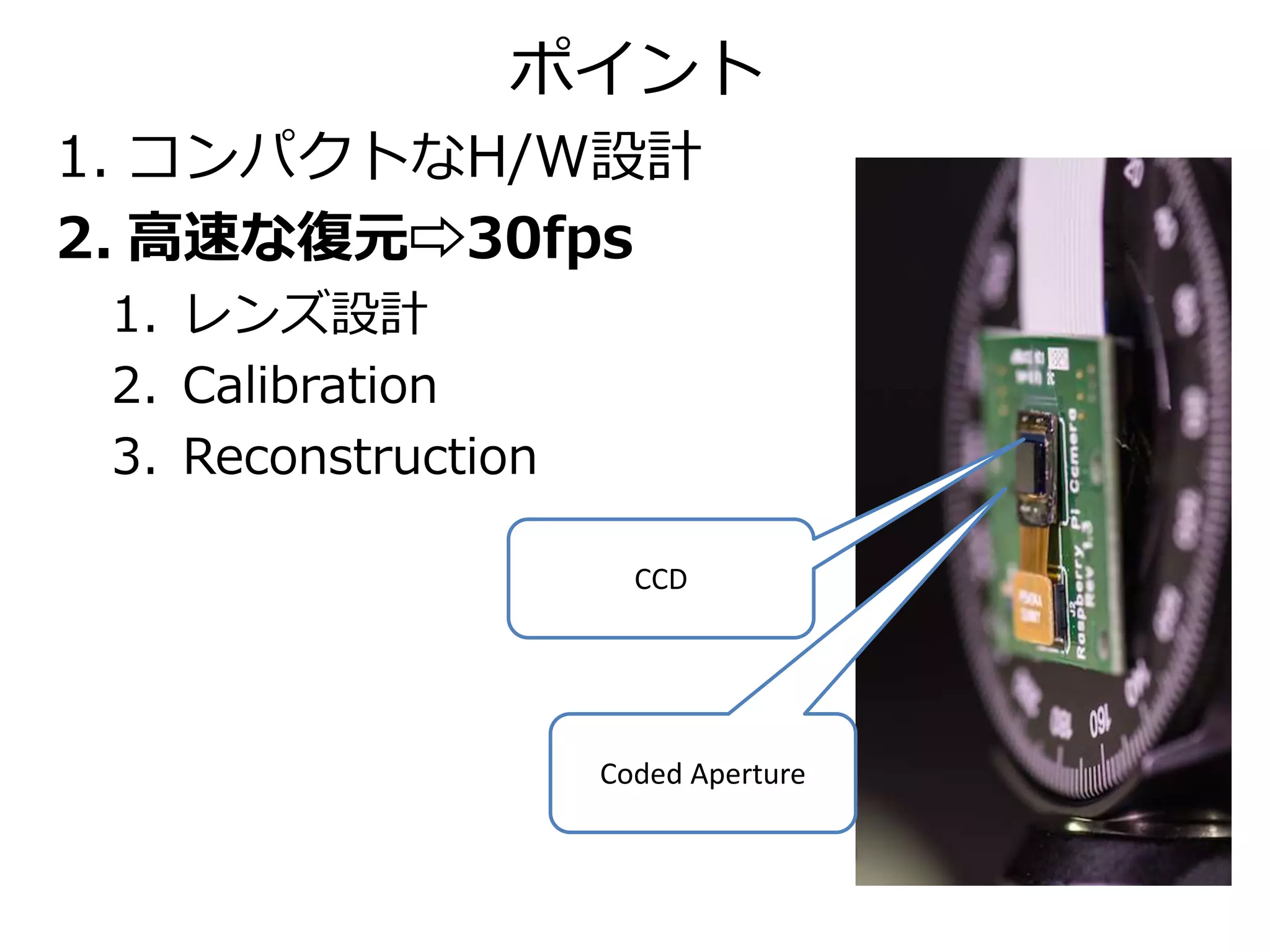
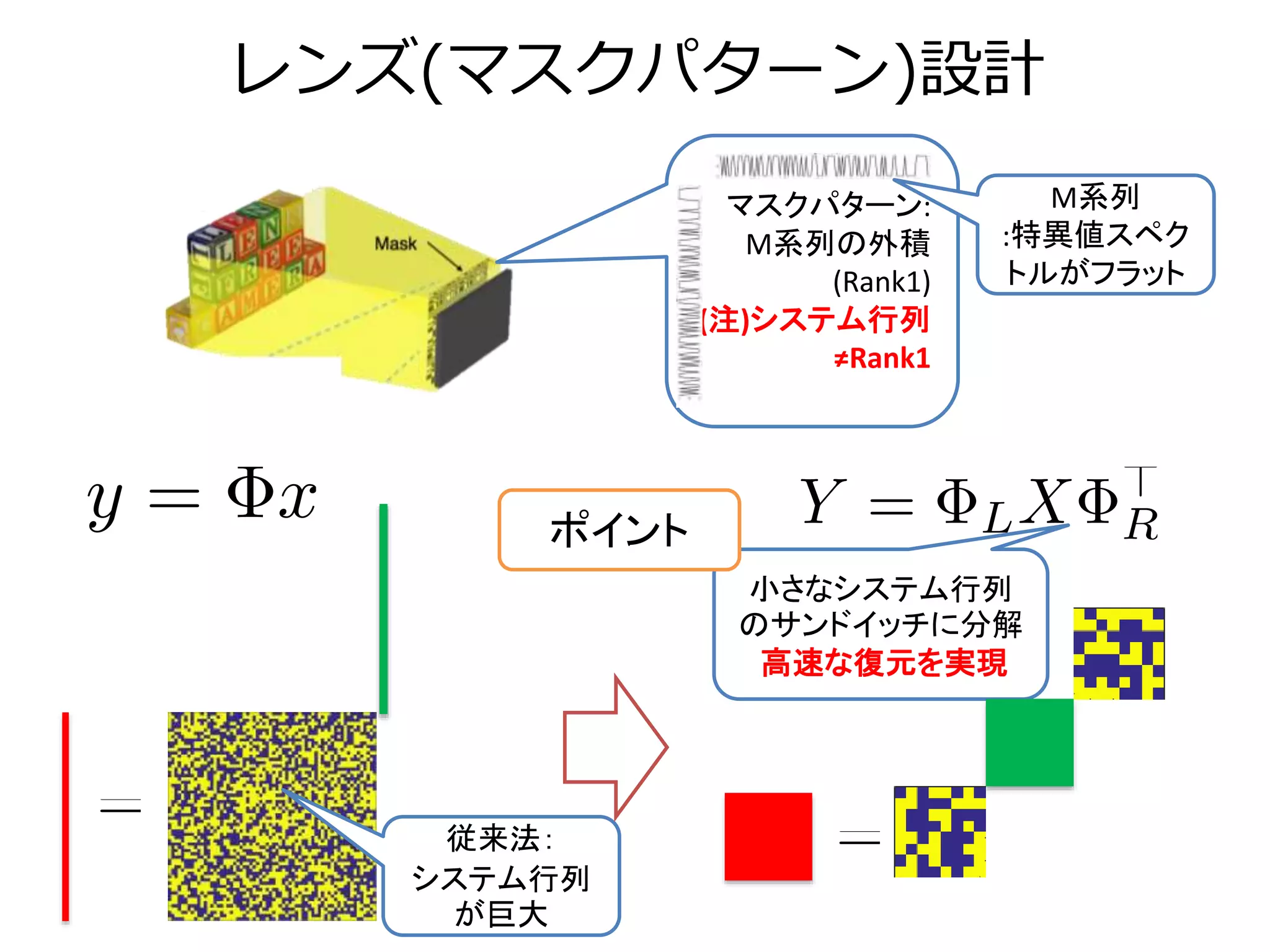
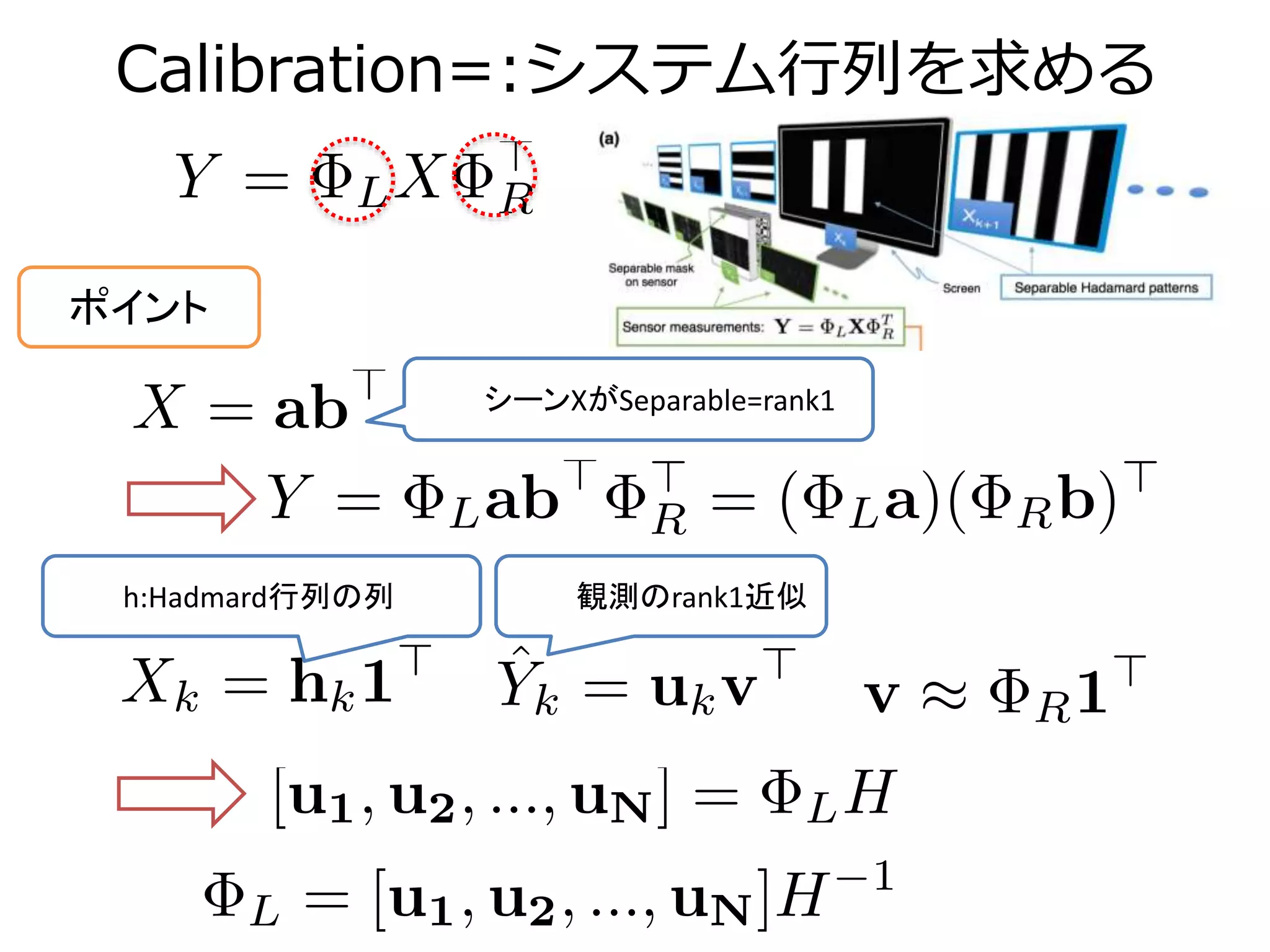
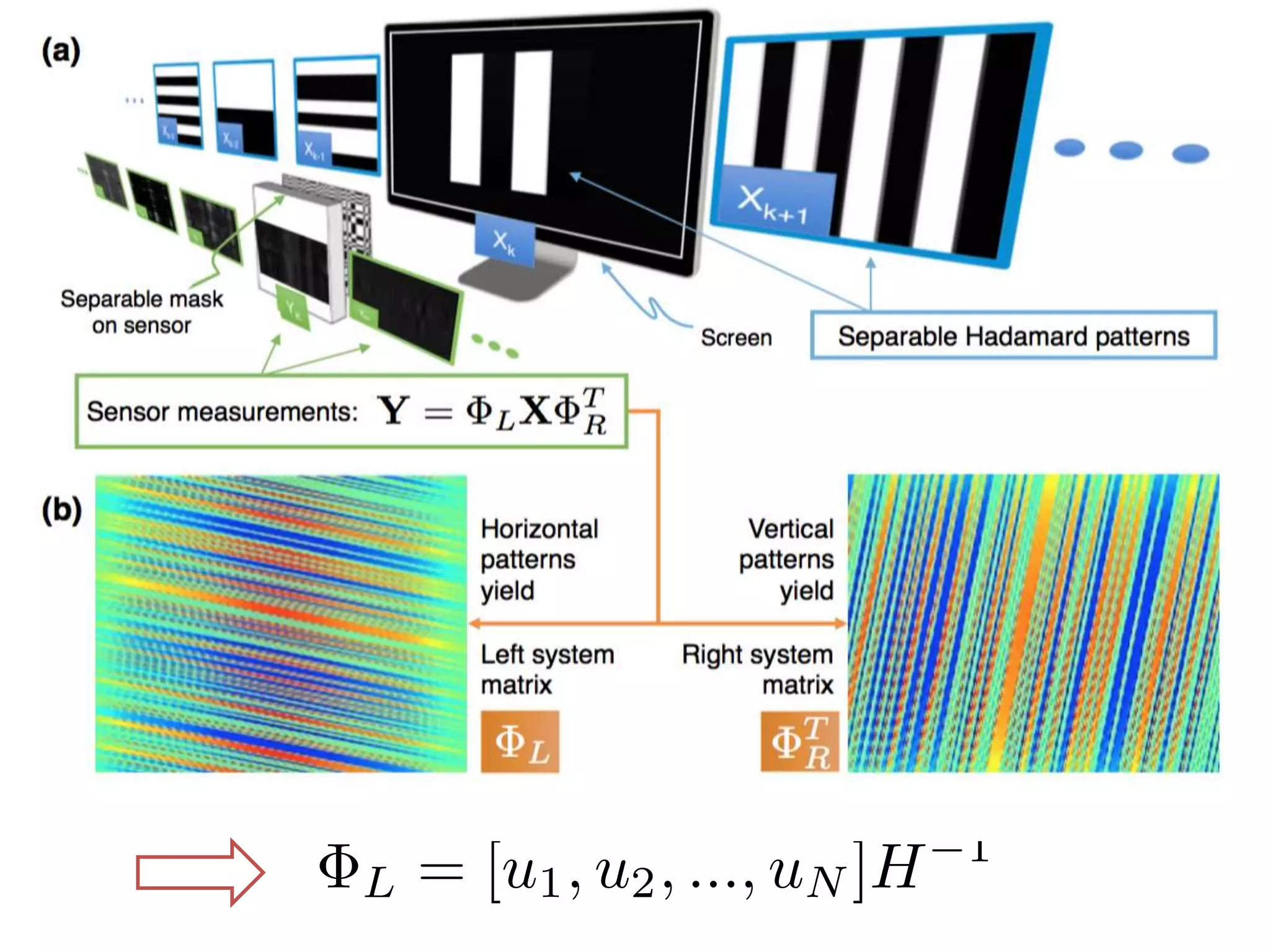
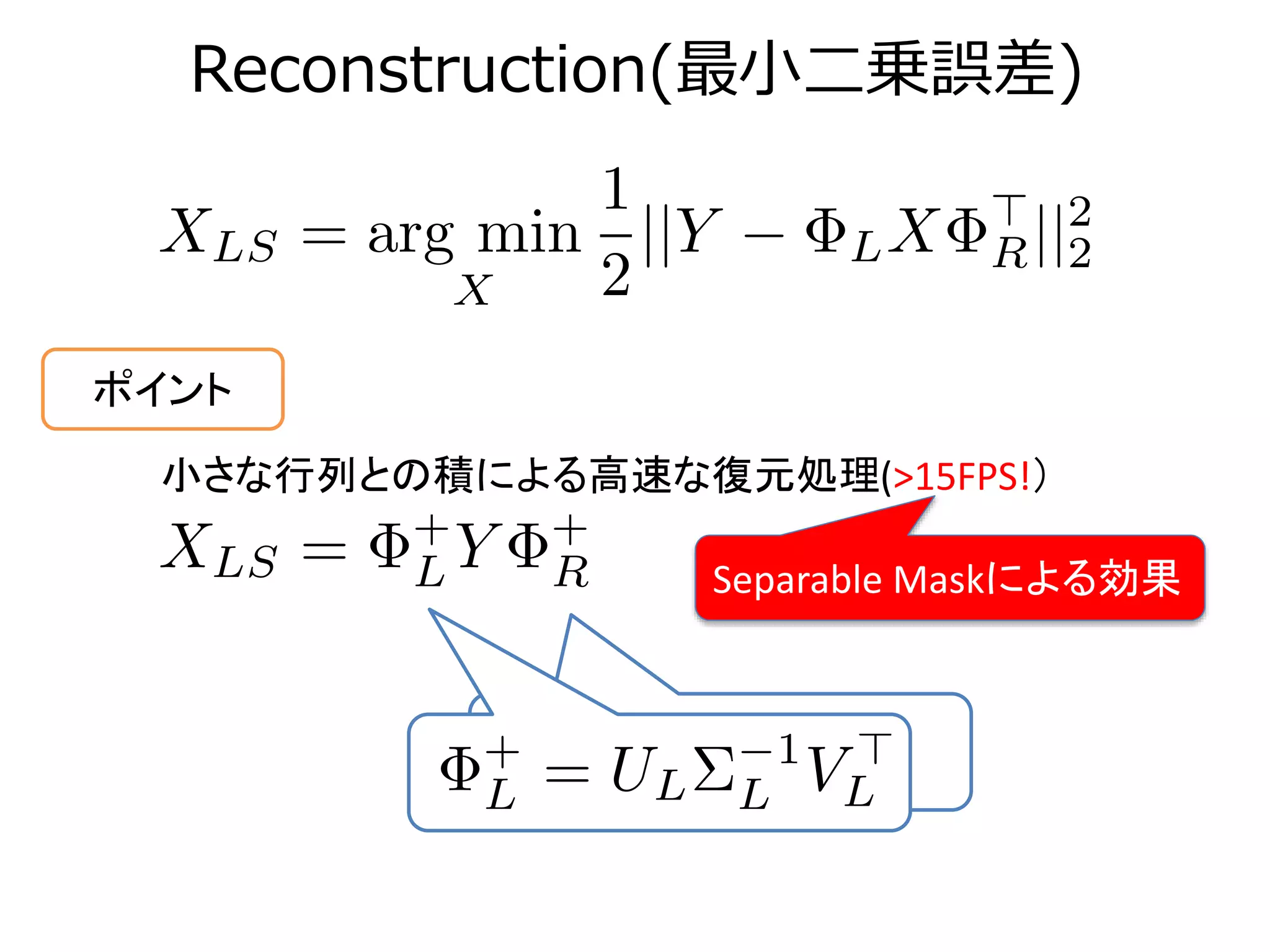
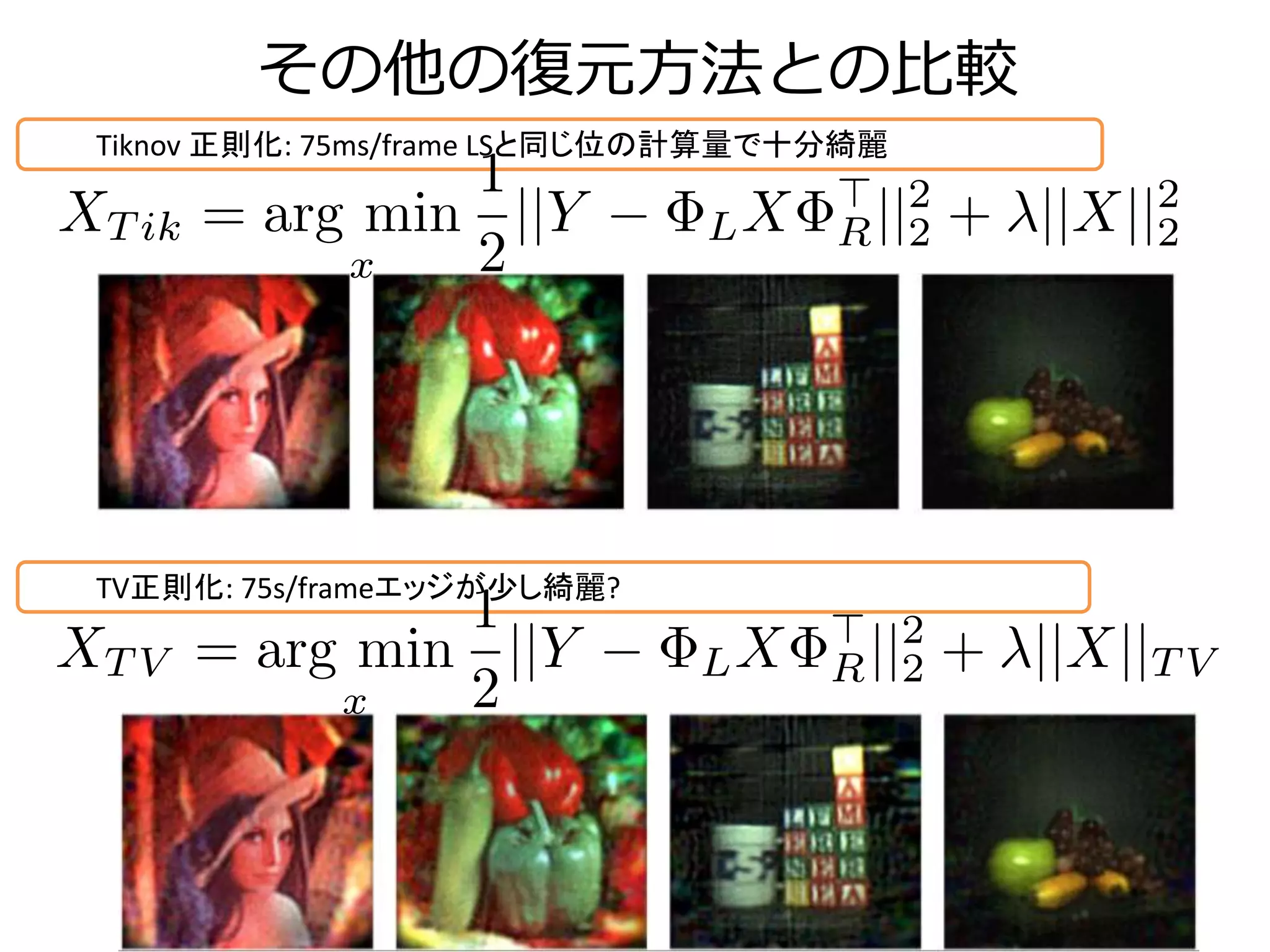
2015年にRice Univ. が発表した激薄カメラFLAT CAM: Replacing Lenses with Masks and Computationの解説です. その他,様々な変わったカメラについて解説しています.