Downloaded 20 times

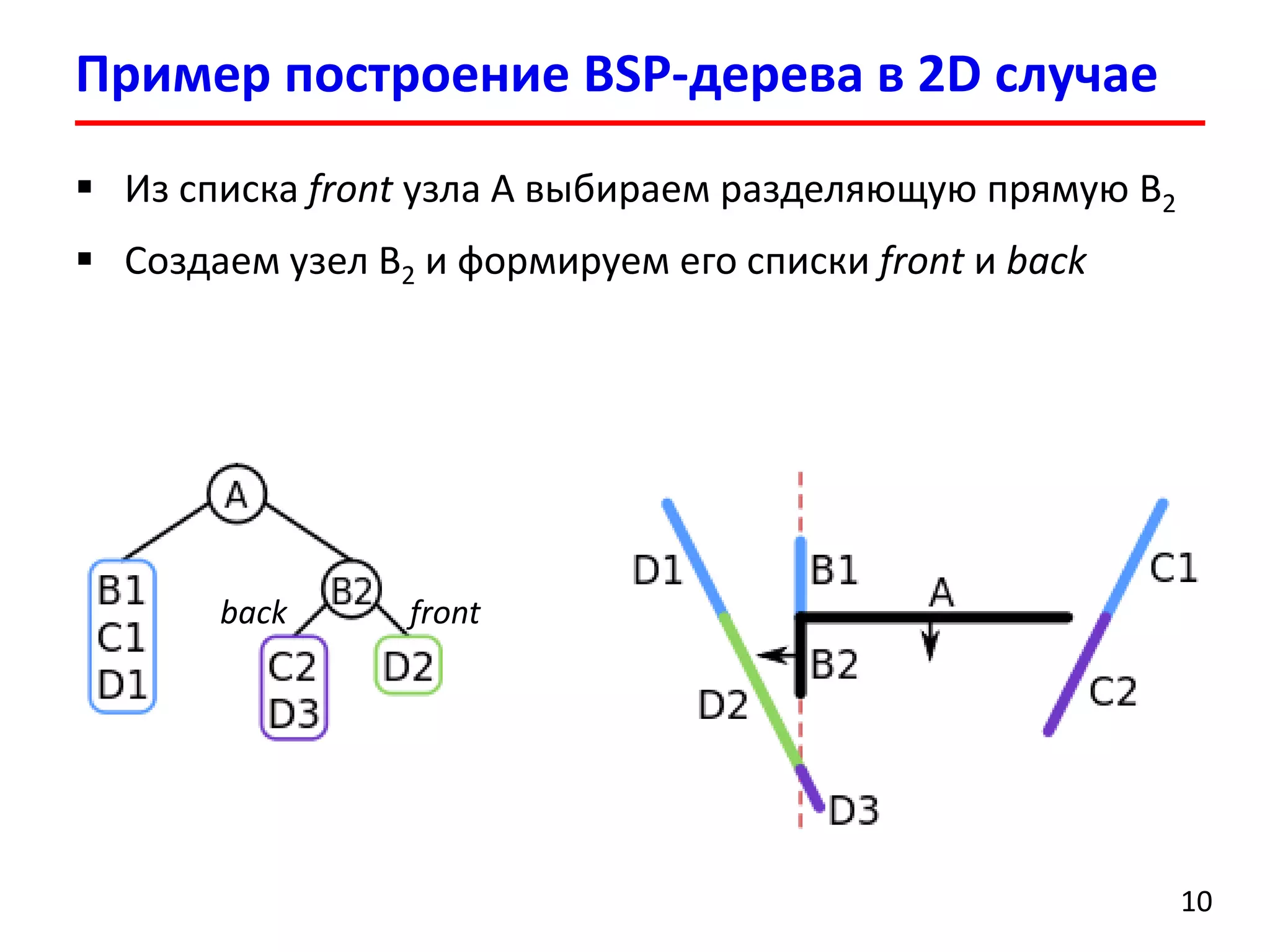
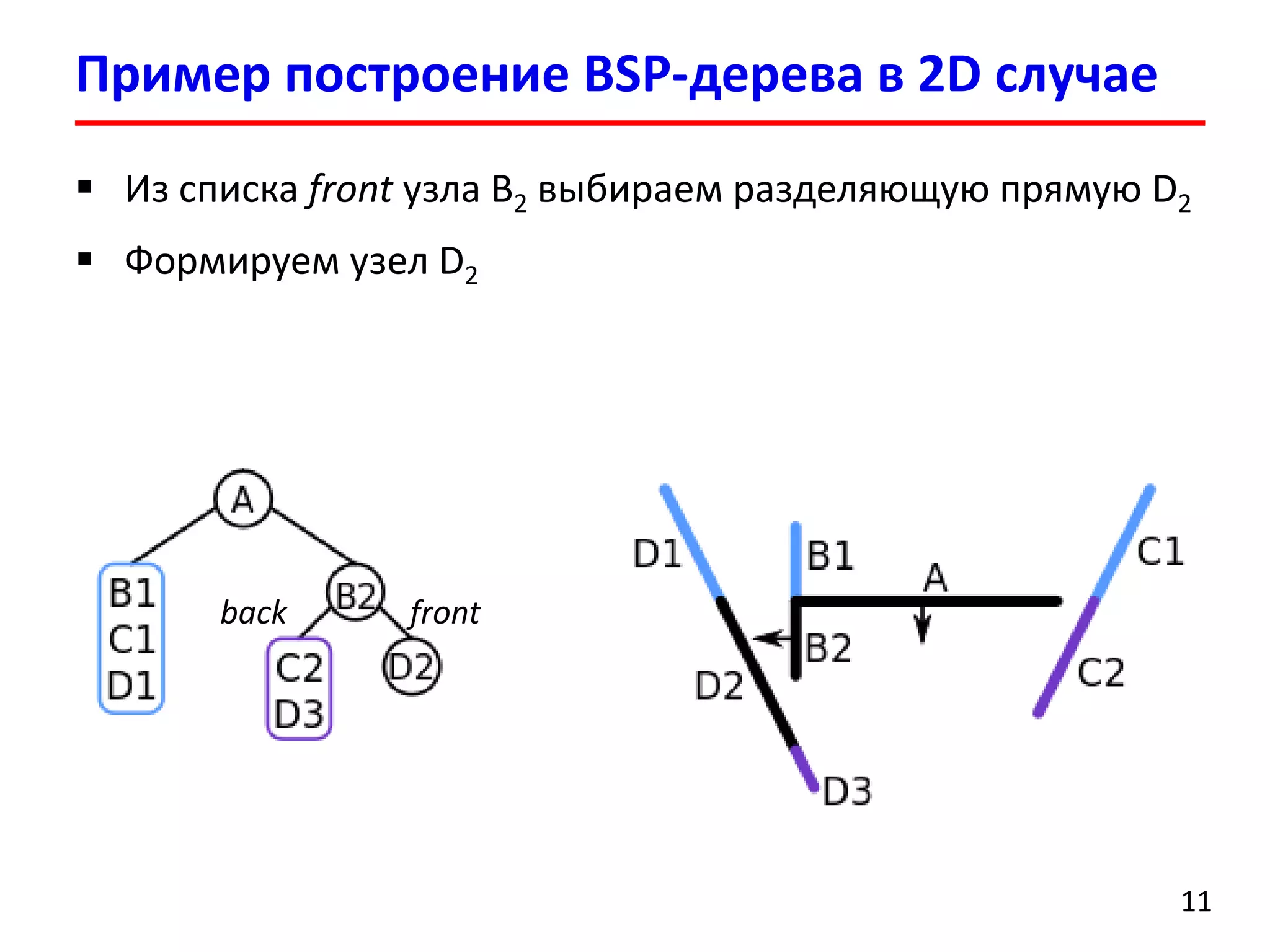
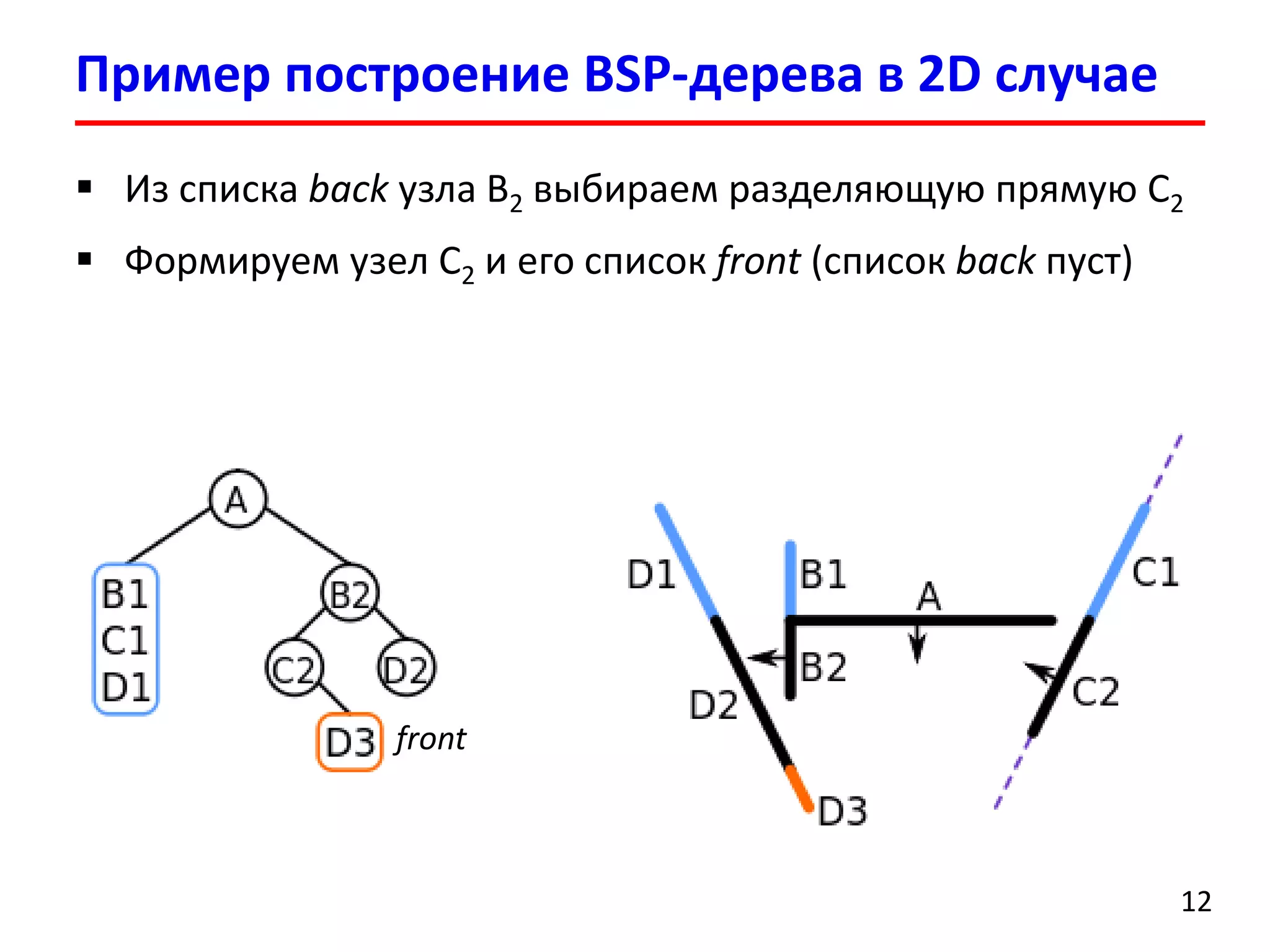
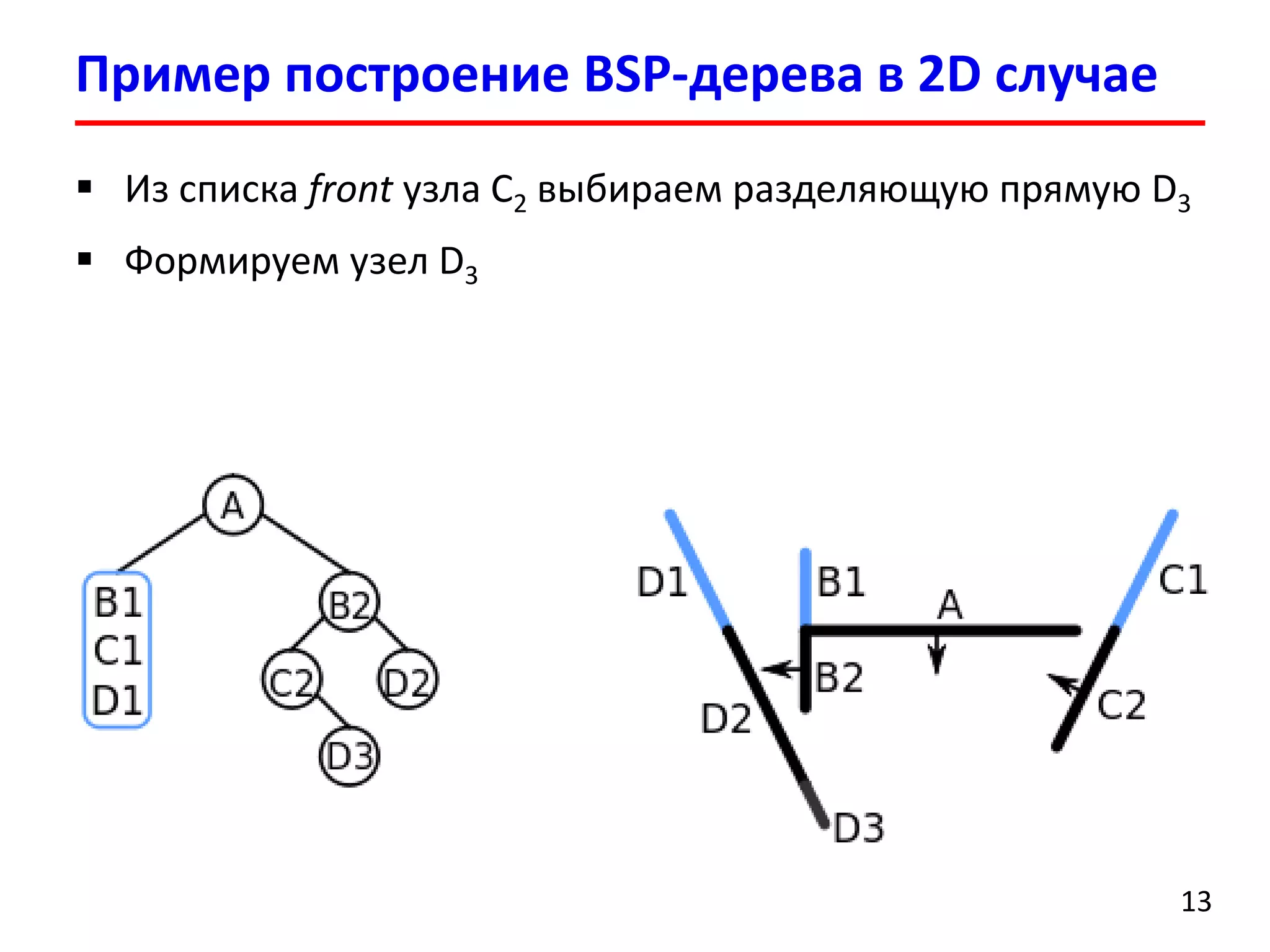
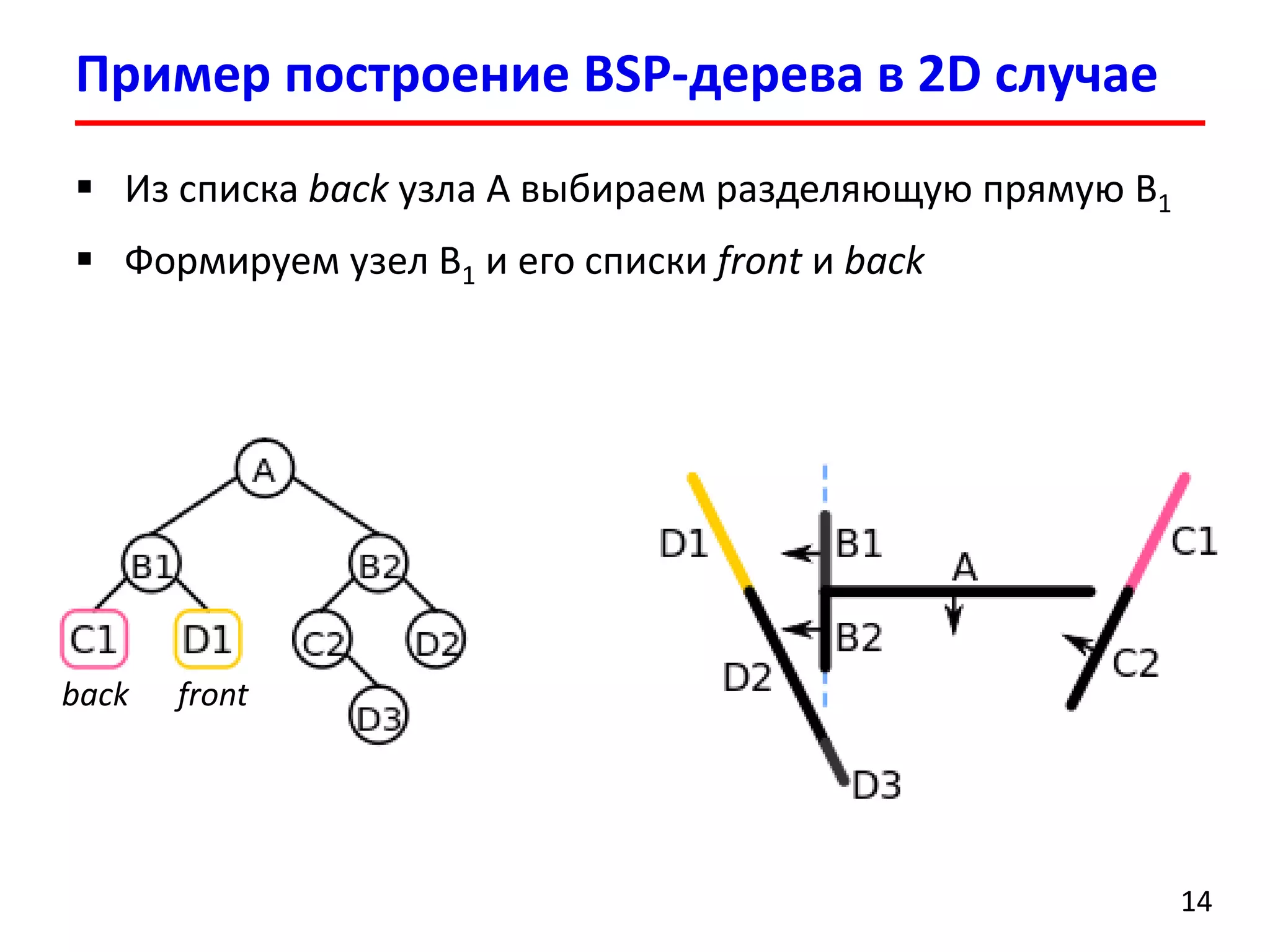
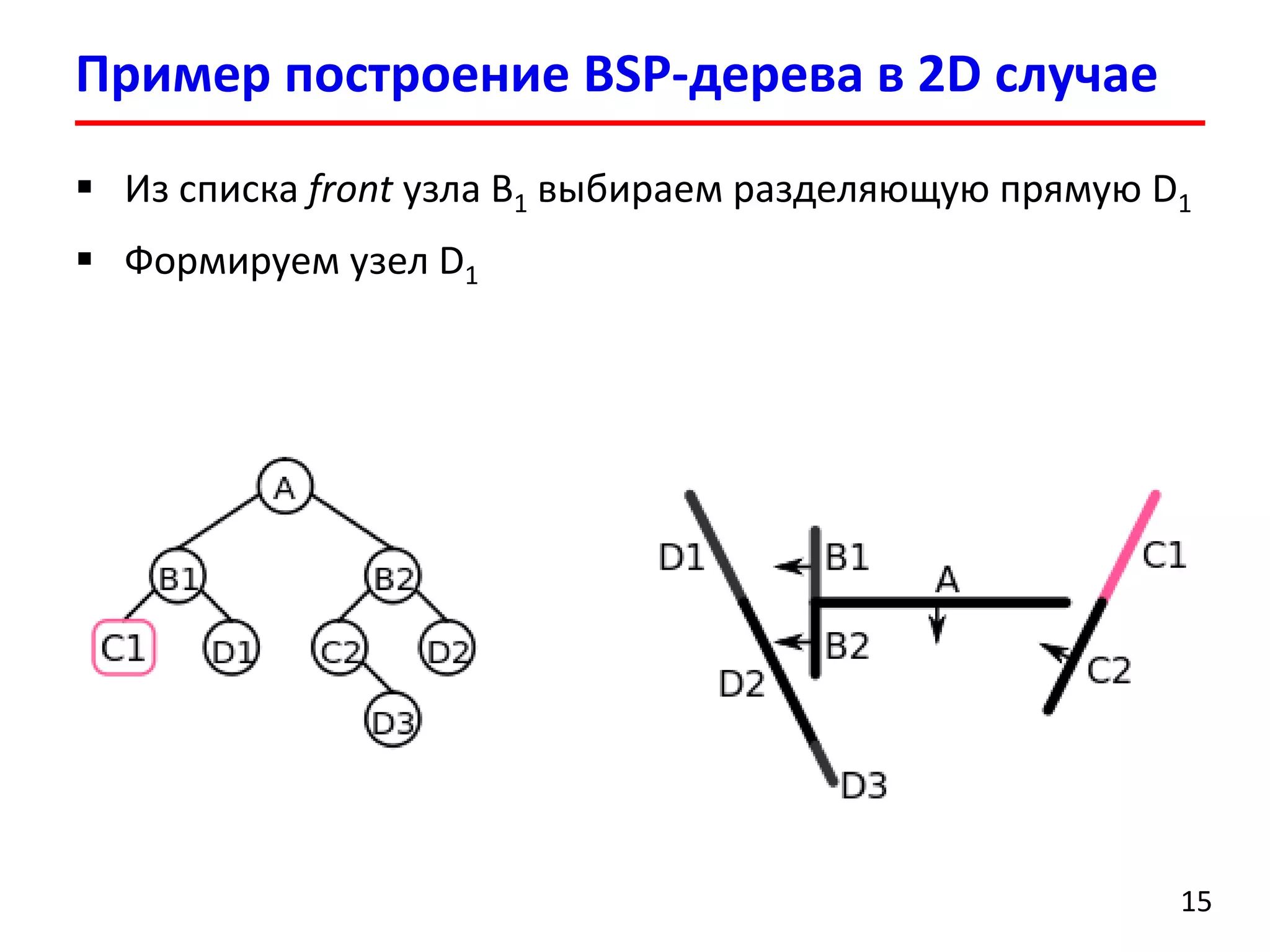
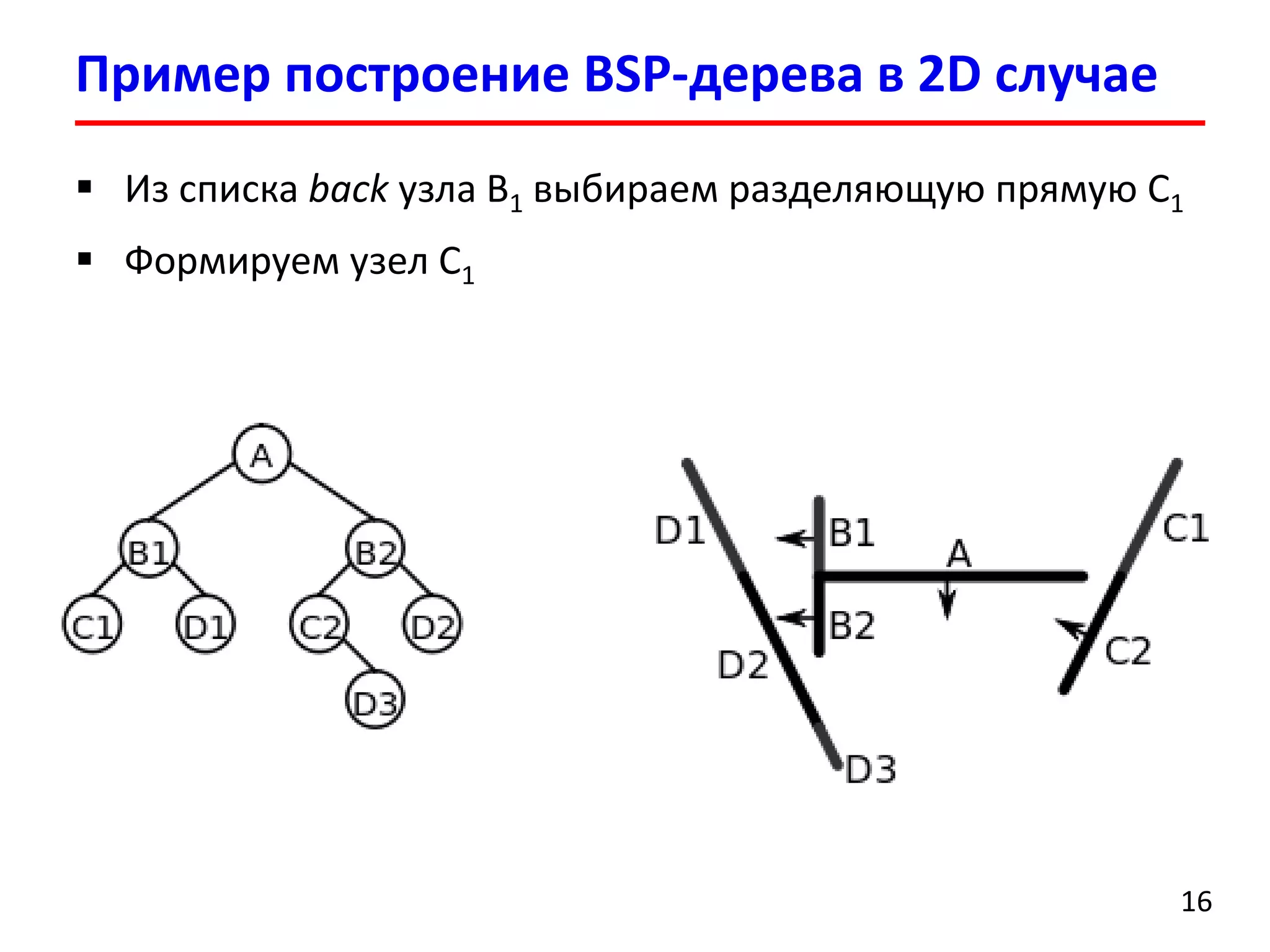
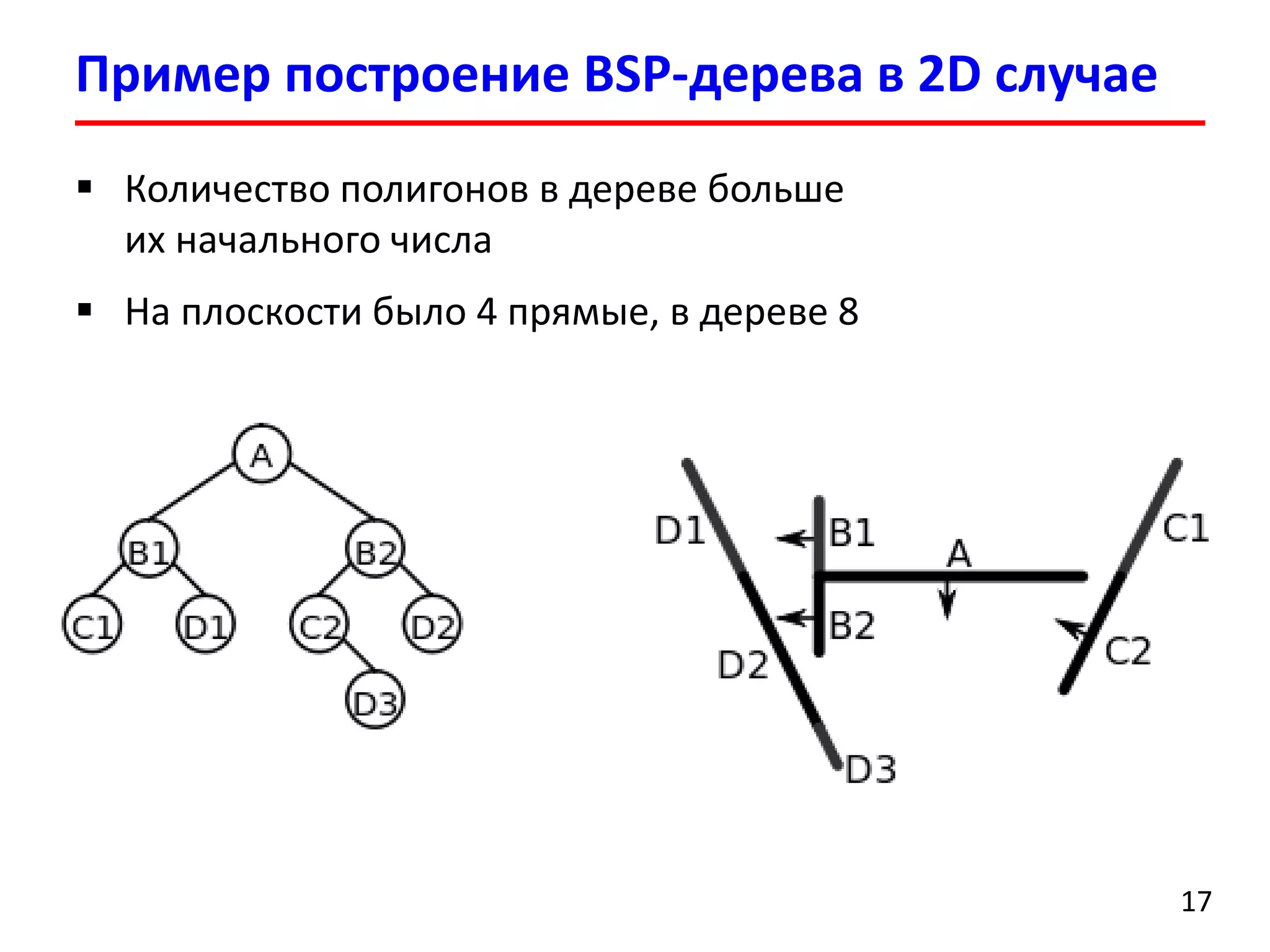

Документ представляет лекцию о деревьях разбиения пространства (BSP деревья), описывая их применение в визуализации трехмерных сцен, а также задачи сортировки полигонов и обнаружения столкновений. Рассматриваются алгоритмы построения BSP деревьев и введение в k-мерные деревья и деревья квадрантов, объясняя их структуру и применение. Лекция также упоминает исторические аспекты использования BSP деревьев в компьютерных играх.


















































































