Download as PDF, PPTX

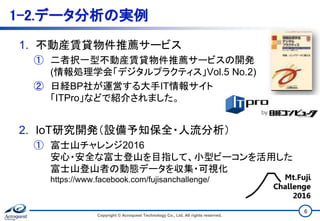
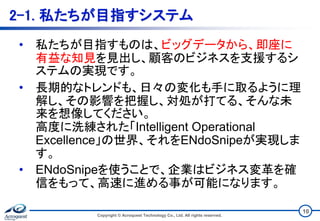
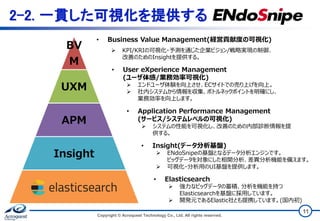
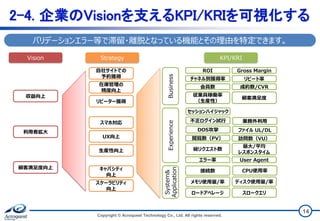
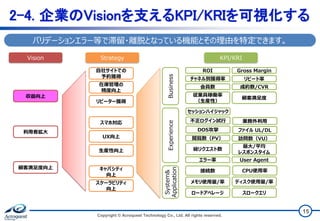
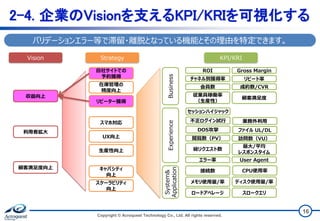
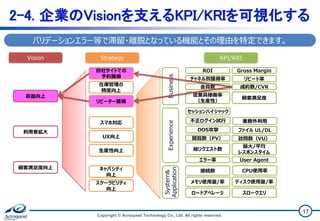





ENdoSnipeはシステムの可視化、そしてビジネスの可視化を行うツールです。ENdoSnipeはアプリケーションのパフォーマンスを可視化する「APM」と、ユーザーの満足度を可視化する「UXM」、そして経営貢献度を可視化する「BVM」を提供し、一貫した可視化を行っています。本セッションでは、ENdoSnipeがElasticsearchを分析基盤として用いた理由、また、APM・UXM・BVMを用いたトラブルシューティングや、ユーザーの画面使用状況の可視化、システムパフォーマンス低下と売上の相関分析など、事例を交えてご紹介します。

![[data analytics showcase] B11: ビッグデータを高速に検索・分析する「Elasticsearch」~新プラグイン「Graph」...](https://cdn.slidesharecdn.com/ss_thumbnails/waubsfngq2iqk8eggult-signature-33a079331e4d341f615beadcebfcdc44a5e412d60f4705c29726afdc4cbdaa7a-poli-161007073051-thumbnail.jpg?width=640&height=640&fit=bounds)





















![[AI02] こんなに敷居が低いのならば、Azure でやってみようか機械学習](https://cdn.slidesharecdn.com/ss_thumbnails/ai02-170602095349-thumbnail.jpg?width=640&height=640&fit=bounds)






![Social GAME における AI 活用事例 [第 4 回 Google Cloud INSIDE Games & Apps]](https://cdn.slidesharecdn.com/ss_thumbnails/0607inside4socialgame-180612044555-thumbnail.jpg?width=640&height=640&fit=bounds)




















![レガシーに埋もれたデータをリアルタイムでクラウドへ [ATTUNITY & インサイトテクノロジー IoT / Big Data フォーラム 2018]](https://cdn.slidesharecdn.com/ss_thumbnails/attunityseminar20181206msnakagawa-181211014925-thumbnail.jpg?width=640&height=640&fit=bounds)














