Download to read offline

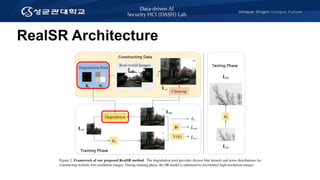
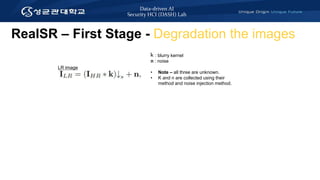
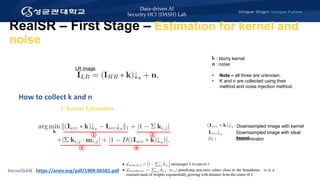
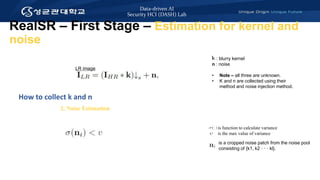
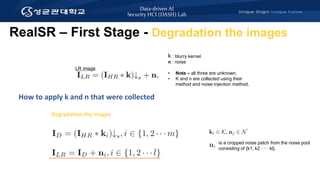
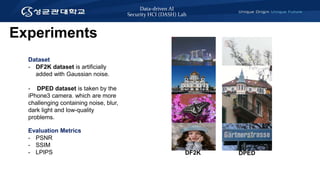
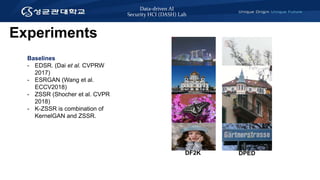
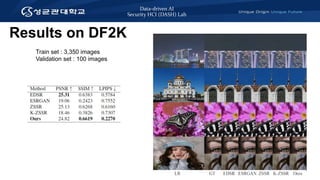

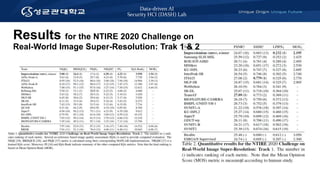

The document discusses a realistic degradation framework for super-resolution (ReaLSR) developed to improve image quality by addressing issues related to traditional bicubic down-sampling methods, which often result in blurry images and lost frequency details. ReaLSR utilizes kernel estimation and noise injection to generate more accurate low-resolution images that preserve domain attributes, ultimately enhancing performance in super-resolution tasks. The framework has shown success in evaluations, winning the NTIRE 2020 challenge for real-world image super-resolution.
![“zero-shot” super-resolution using deep internal learning [CVPR2018]](https://cdn.slidesharecdn.com/ss_thumbnails/cvpr2018zero-shotsuper-resolutionusingdeepinternallearning-210903045317-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Seminar arxiv]fake face detection via adaptive residuals extraction network](https://cdn.slidesharecdn.com/ss_thumbnails/seminararxivfakefacedetectionviaadaptiveresidualsextractionnetwork-210521190205-thumbnail.jpg?width=640&height=640&fit=bounds)










![YolactEdge Review [cdm]](https://cdn.slidesharecdn.com/ss_thumbnails/yolactedgereviewcdm-210109174625-thumbnail.jpg?width=640&height=640&fit=bounds)












![[ECCV2022] Generative Domain Adaptation for Face Anti-Spoofing](https://cdn.slidesharecdn.com/ss_thumbnails/eccv2022generativedomainadaptationforfaceanti-spoofing-230404070519-3d92c871-thumbnail.jpg?width=640&height=640&fit=bounds)
![[AAAI21] Self-Domain Adaptation for Face Anti-Spoofing](https://cdn.slidesharecdn.com/ss_thumbnails/aaai21self-domainadaptationforfaceanti-spoofing-230404070154-76c48848-thumbnail.jpg?width=640&height=640&fit=bounds)
![[CVPR'22] Domain Generalization via Shuffled Style Assembly for Face Anti-Spo...](https://cdn.slidesharecdn.com/ss_thumbnails/cvpr22domaingeneralizationviashuffledstyleassemblyforfaceanti-spoofing-230404065903-720fcc8d-thumbnail.jpg?width=640&height=640&fit=bounds)
![[TIFS'22] Learning Meta Pattern for Face Anti-Spoofing](https://cdn.slidesharecdn.com/ss_thumbnails/tifs22learningmetapatternforfaceanti-spoofing-230404065519-012efd84-thumbnail.jpg?width=640&height=640&fit=bounds)
![[AAAI'23]Learning Polysemantic Spoof Trace](https://cdn.slidesharecdn.com/ss_thumbnails/aaai23learningpolysemanticspooftrace1-230404065205-9701b422-thumbnail.jpg?width=640&height=640&fit=bounds)

![[CVPRW2021]FReTAL: Generalizing Deepfake detection using Knowledge Distillati...](https://cdn.slidesharecdn.com/ss_thumbnails/cvprwfretalpresentfeacherrepresentationtransferlearning-220409091913-thumbnail.jpg?width=640&height=640&fit=bounds)
![[NeuralIPS 2020]filter in filter pruning](https://cdn.slidesharecdn.com/ss_thumbnails/filterinfilterpruningpaperreview2-220409090549-thumbnail.jpg?width=640&height=640&fit=bounds)













![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)









