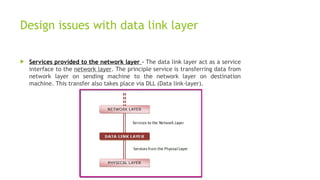
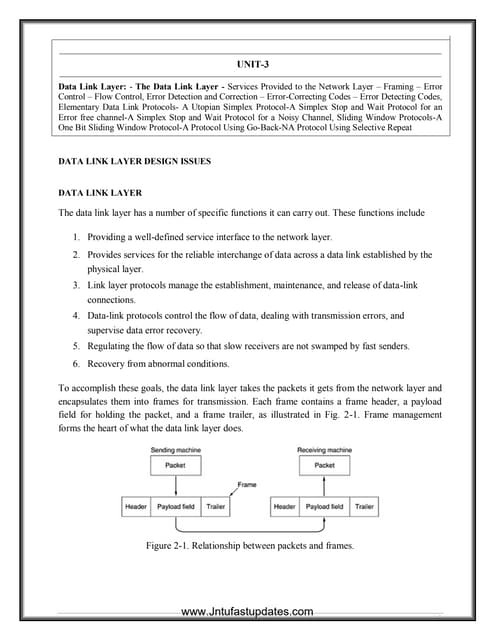
The document discusses the data link layer, the second layer in the OSI model, and its primary responsibilities including framing, error control, flow control, and link layer services. It details the two sub-layers under the data link layer: Logical Link Control (LLC), which ensures reliable communication through error recovery and flow control, and Media Access Control (MAC), which manages access to the transmission medium and error detection. Additionally, the document covers framing methods, error detection and correction techniques, and the significance of flow control mechanisms for efficient data transmission.