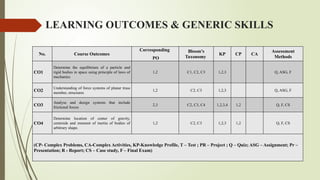
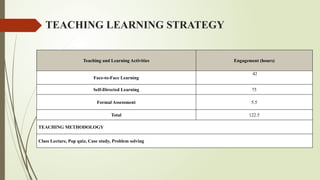
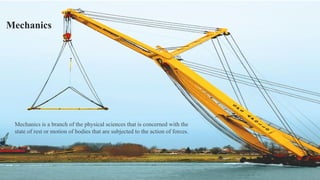
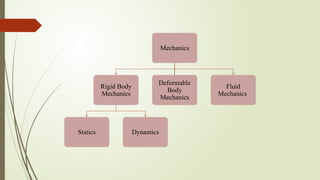
The document outlines a course on Engineering Mechanics I, focusing on free body diagrams, Newton's laws of motion, and equilibrium of particles and bodies. Key topics include statics, forces in structures, dry friction, center of gravity, and moments of inertia, with specified learning outcomes and assessment methods. It also describes the course's teaching methodology, resources, and fundamental concepts of mechanics.