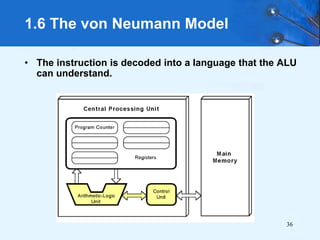
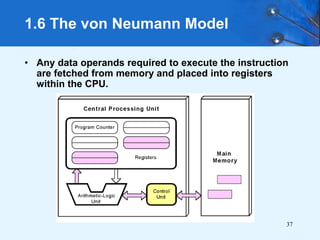
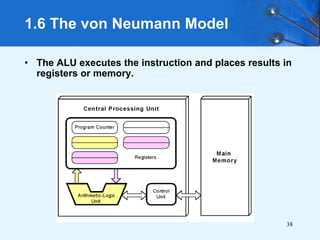
This document provides an overview of computer organization and architecture. It discusses the objectives of studying this topic, which include understanding computer systems' components and interactions, making best use of software tools, and understanding complex tradeoffs in computer design. The document then covers levels of the computer hierarchy from the user level down to the digital logic level. It introduces the von Neumann model and architecture, describing the fetch-decode-execute cycle. Alternative non-von Neumann models like parallel processing and DNA computing are also briefly discussed.