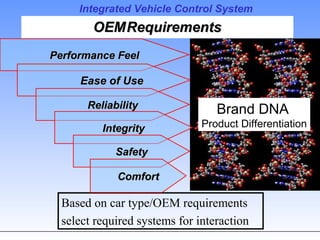
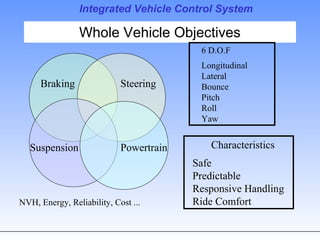
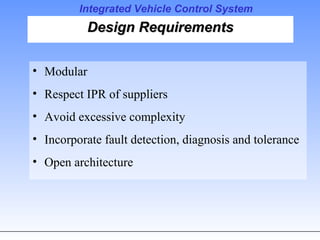
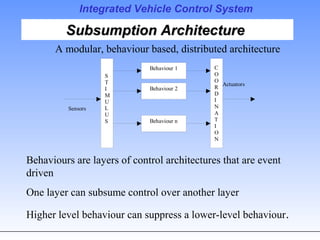
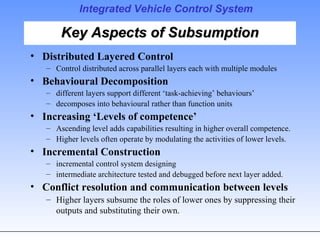
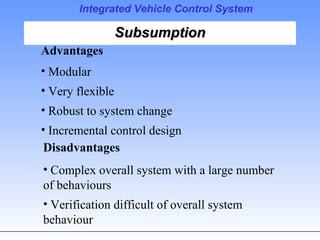
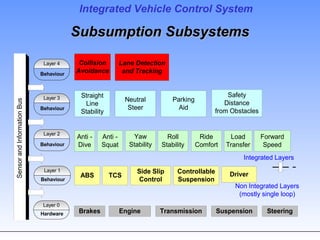
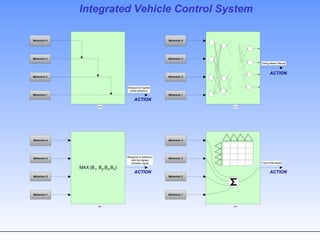
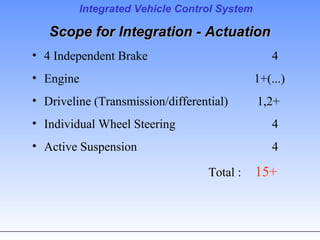
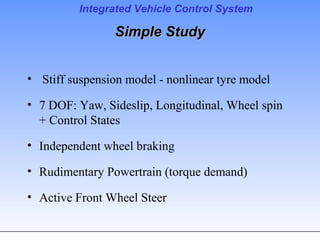
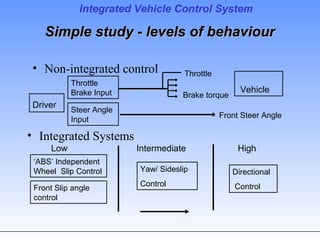
This document discusses integrated vehicle control systems and the need for their integration. It presents an overview of typical vehicle systems that could be integrated like braking, steering, suspension and powertrain. The key challenges of integration are discussed like meeting requirements, modularity, and avoiding excessive complexity. It proposes using a subsumption architecture with layered behaviors as a way to implement integrated control in a distributed way. Examples of simulated studies are presented comparing integrated and non-integrated control of vehicle dynamics. The conclusion recognizes that complexity must be limited while further work is still needed on real-time conflict resolution methods for full vehicle integration.


![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-10
-5
0
5
10
15
20
25
30
time [s]
speed[m/s]
Vehicle Forward Speed
noctrl
S
sigma
S
beta10S
allS](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-17-320.jpg)
![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-200
-150
-100
-50
0
50
100
150
200
time [s]
beta[o
]
Vehicle Side Slip Angle
noctrl
S
sigma
S
beta10
S
all
S](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-18-320.jpg)
![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-4
-3
-2
-1
0
1
2
3
4
time [s]
beta[o
]
Vehicle Side Slip Angle
noctrl
S
sigma
S
beta10
S
all
S](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-19-320.jpg)
![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-60
-40
-20
0
20
40
60
time [s]
delta[o
]
Steer Angle
noctrlS
sigma
S
beta10
S
all
S](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-20-320.jpg)
![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
time [s]
r[rad/s]
Yaw Rate
noctrl
S
sigma
S
beta10
S
all
S](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-21-320.jpg)
![Integrated Vehicle Control System
0 2 4 6 8 10 12 14 16 18 20
-8
-6
-4
-2
0
2
4
6
8
time [s]
a
lat
[m/s2
]
Lateral Acceleration
noctrl
S
sigma
S
beta10
S
all
S](https://image.slidesharecdn.com/brakenetintegratedchassiscontrol2002-140703123436-phpapp02/85/Integrated-chassis-control-Brakenet-2002-22-320.jpg)