Download as PDF, PPTX
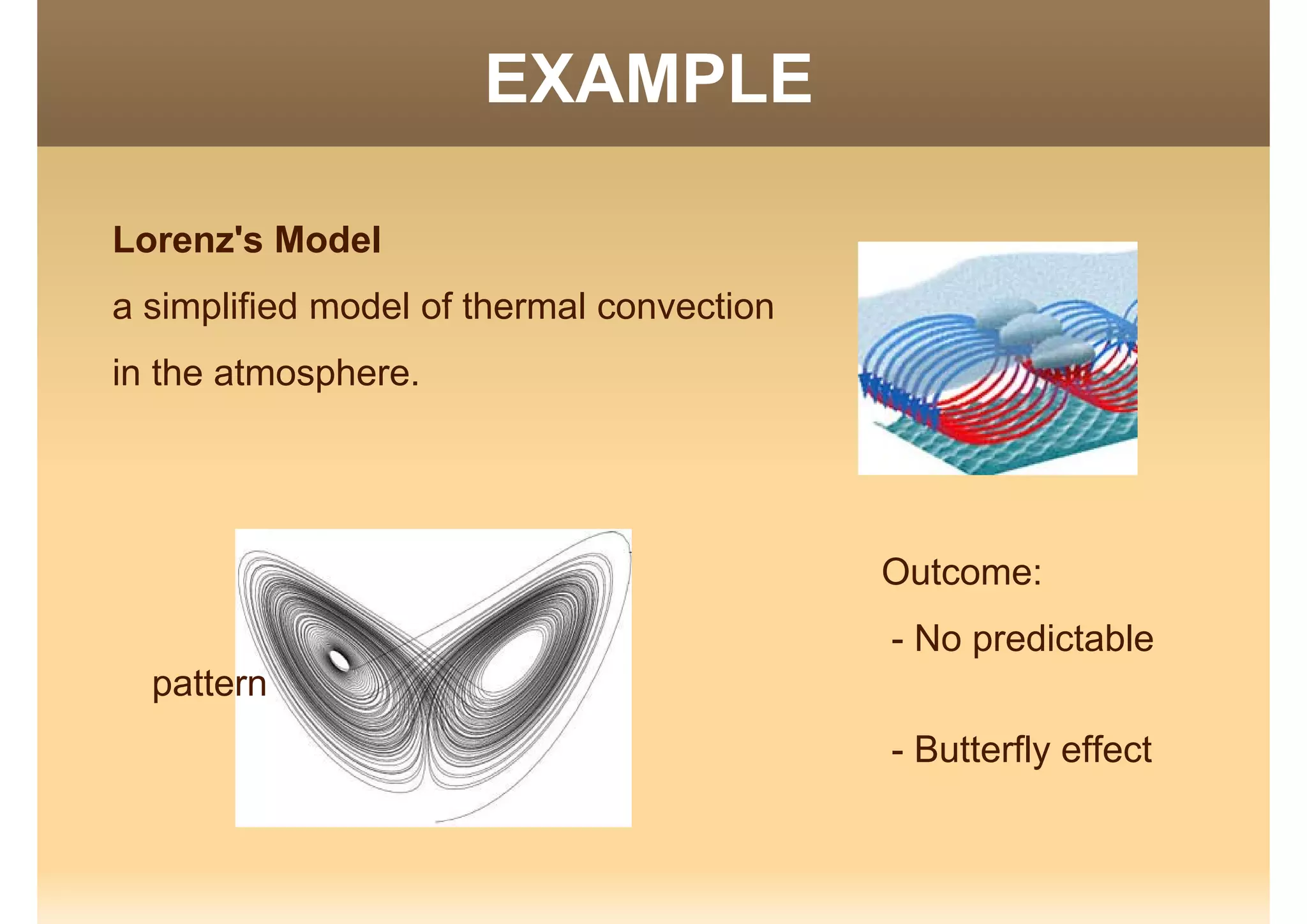
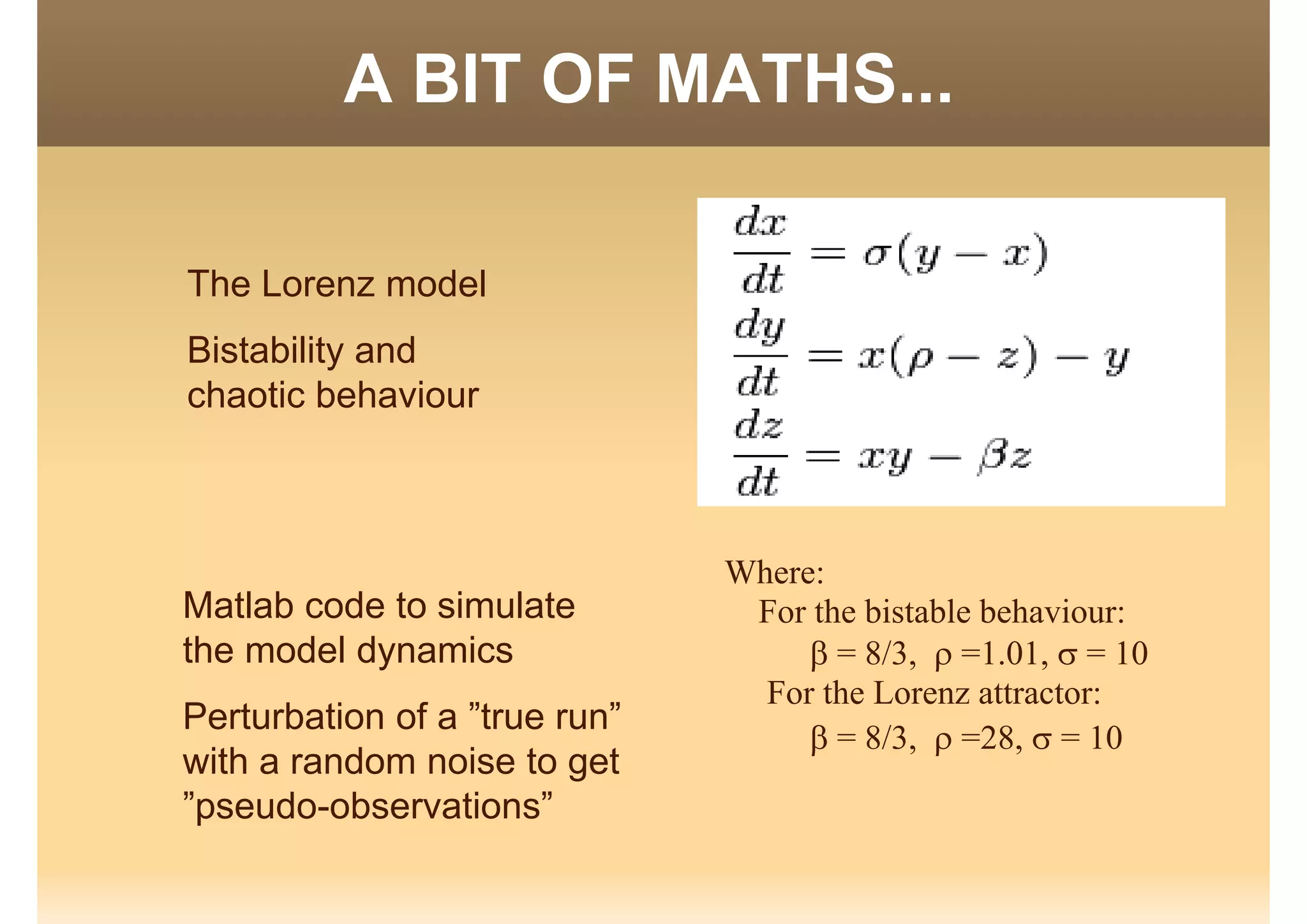
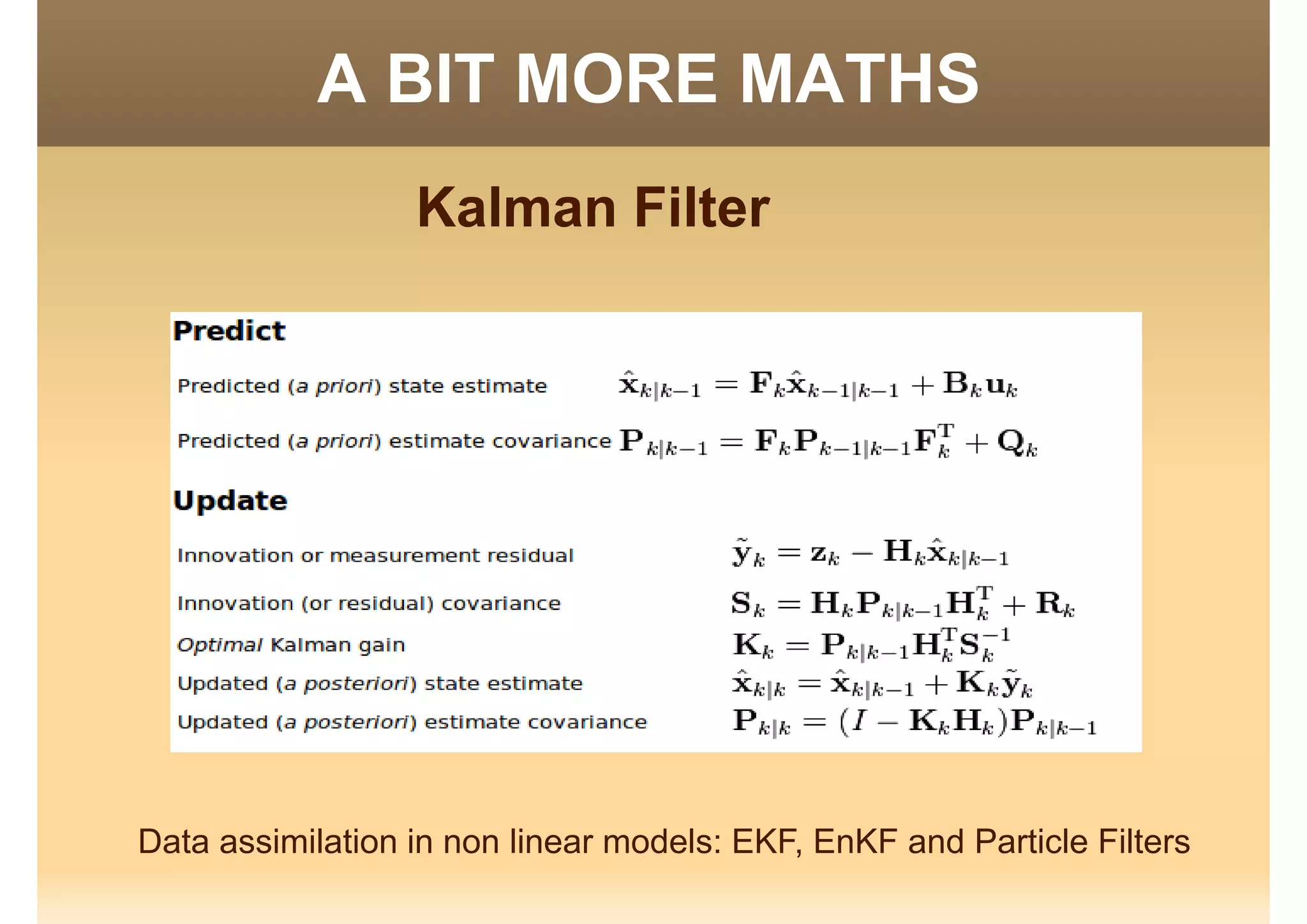
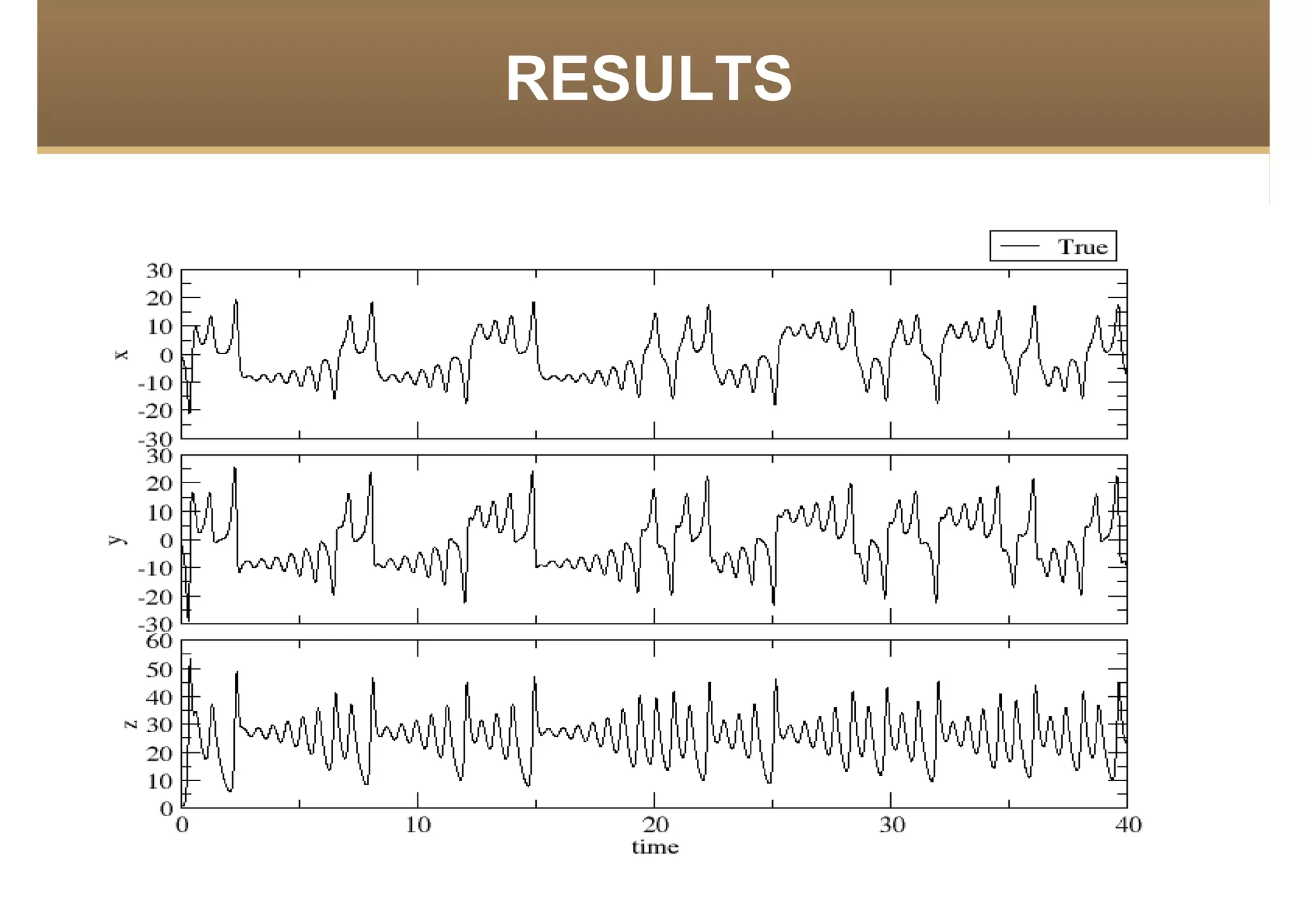
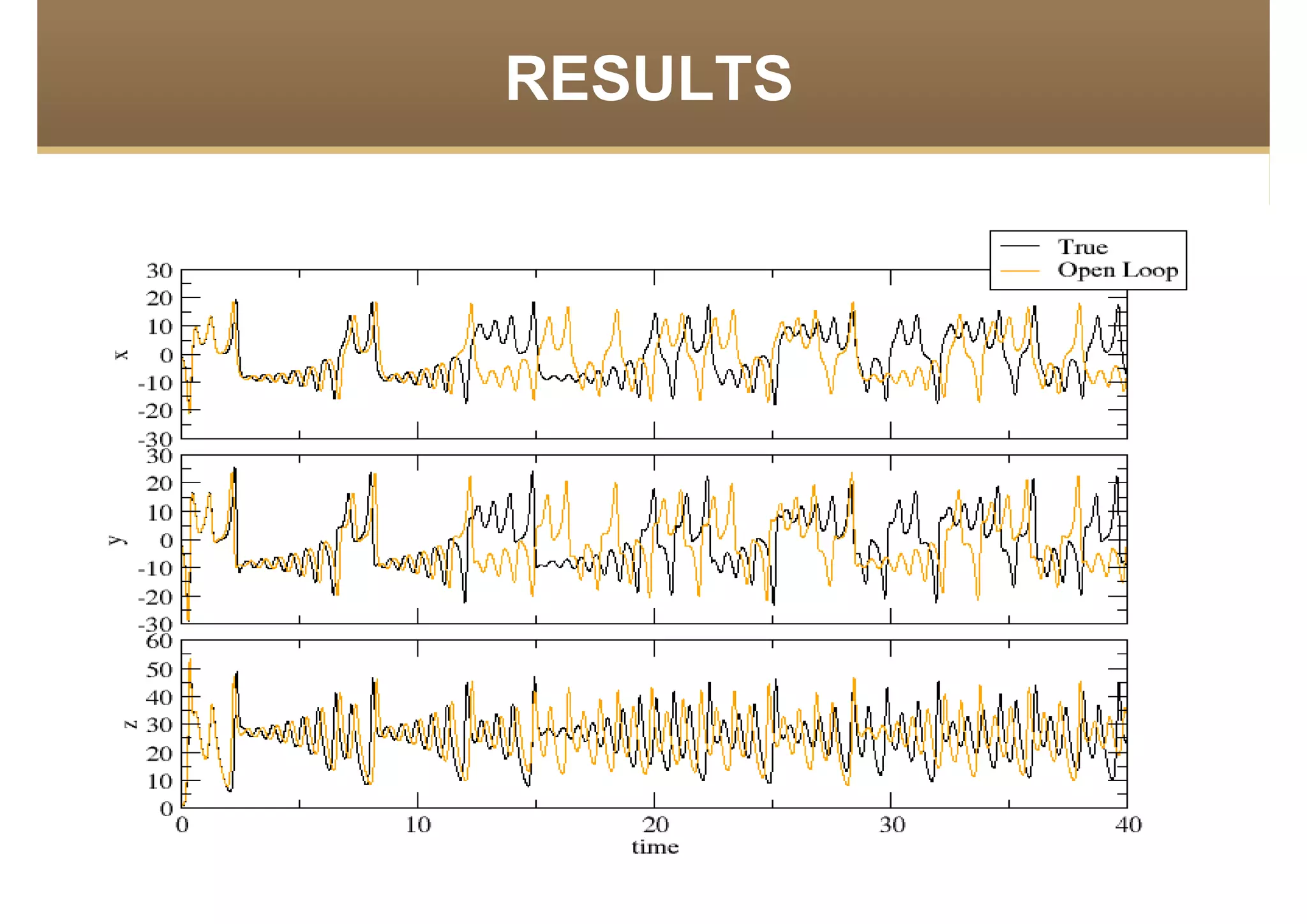
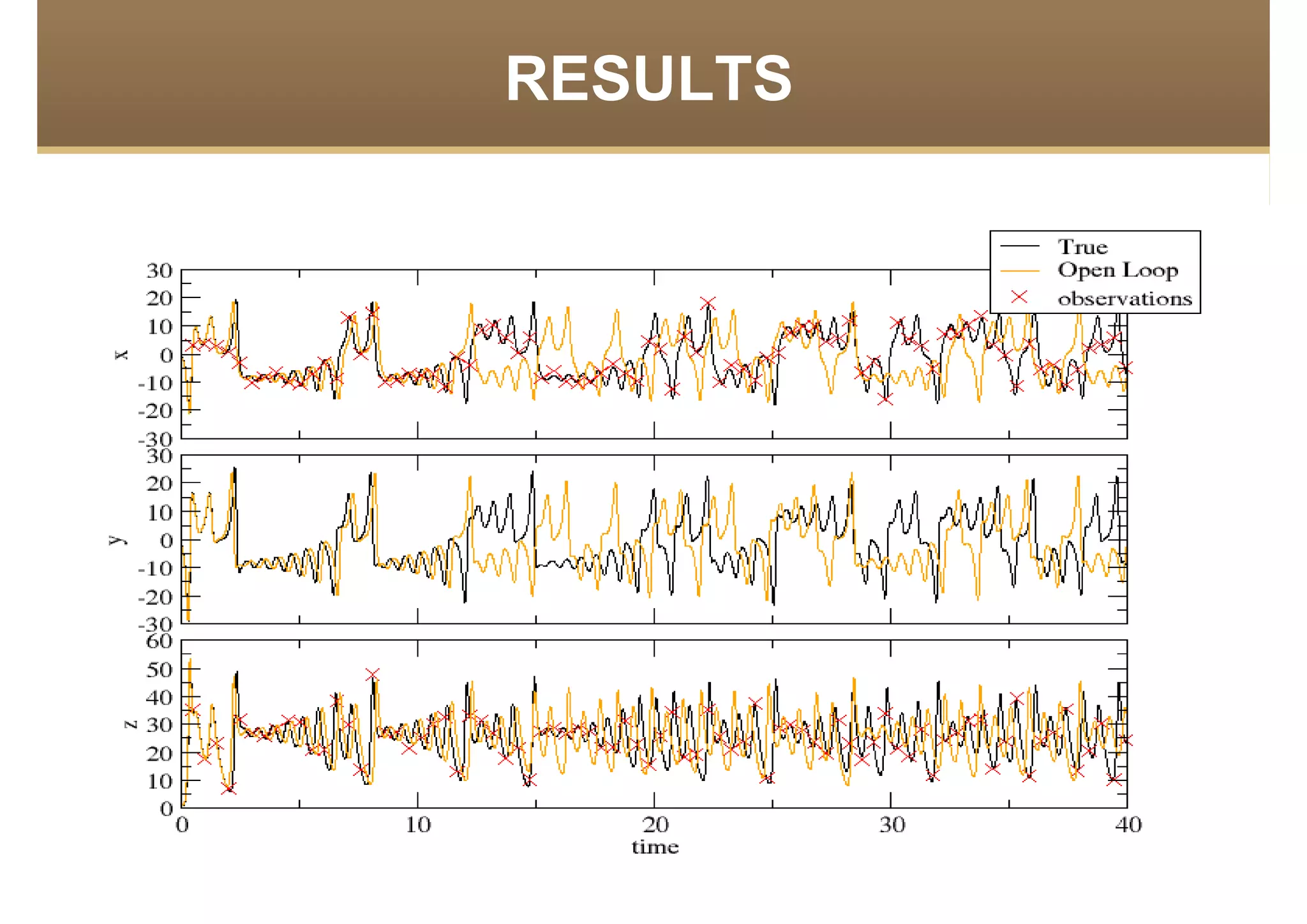
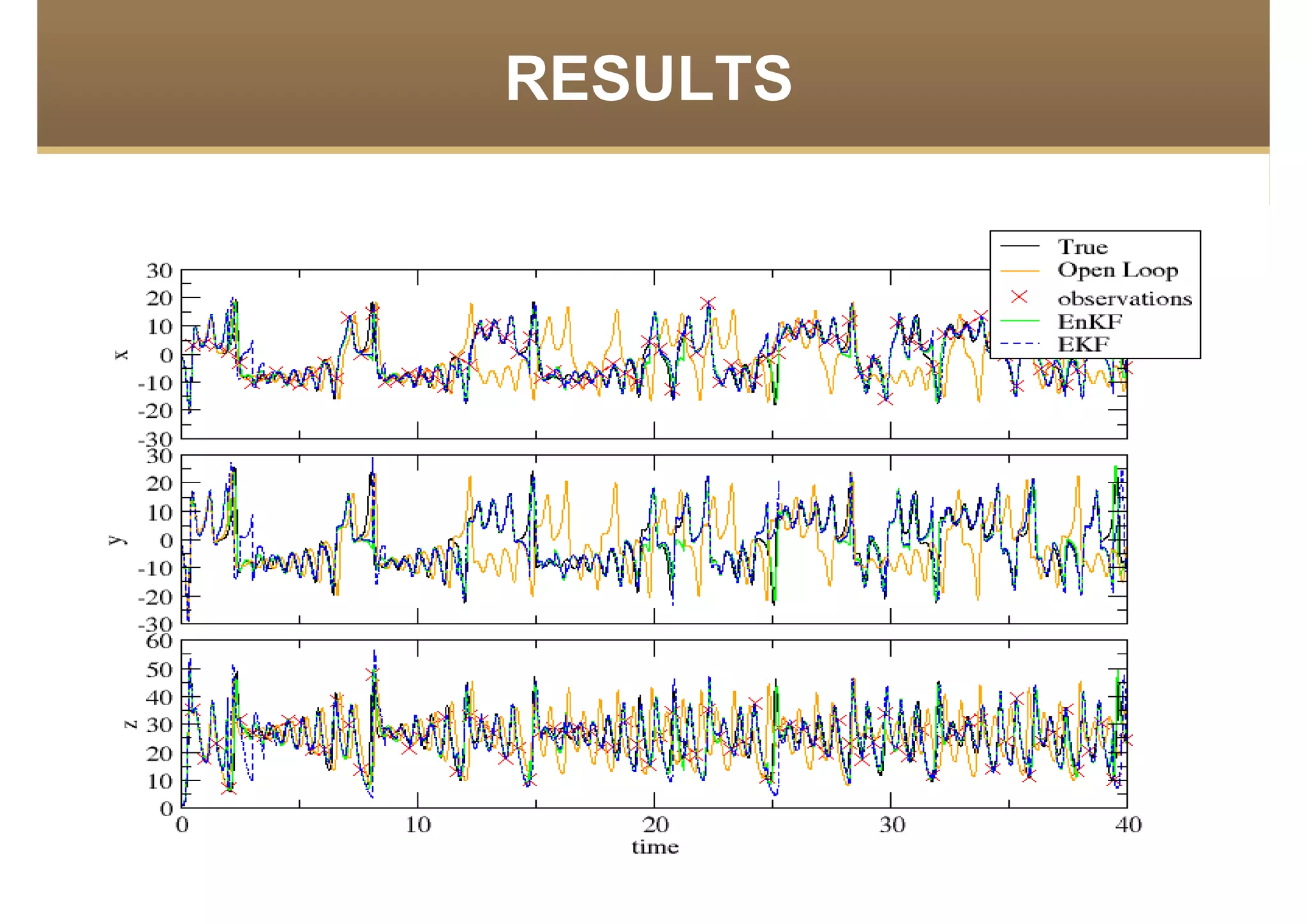
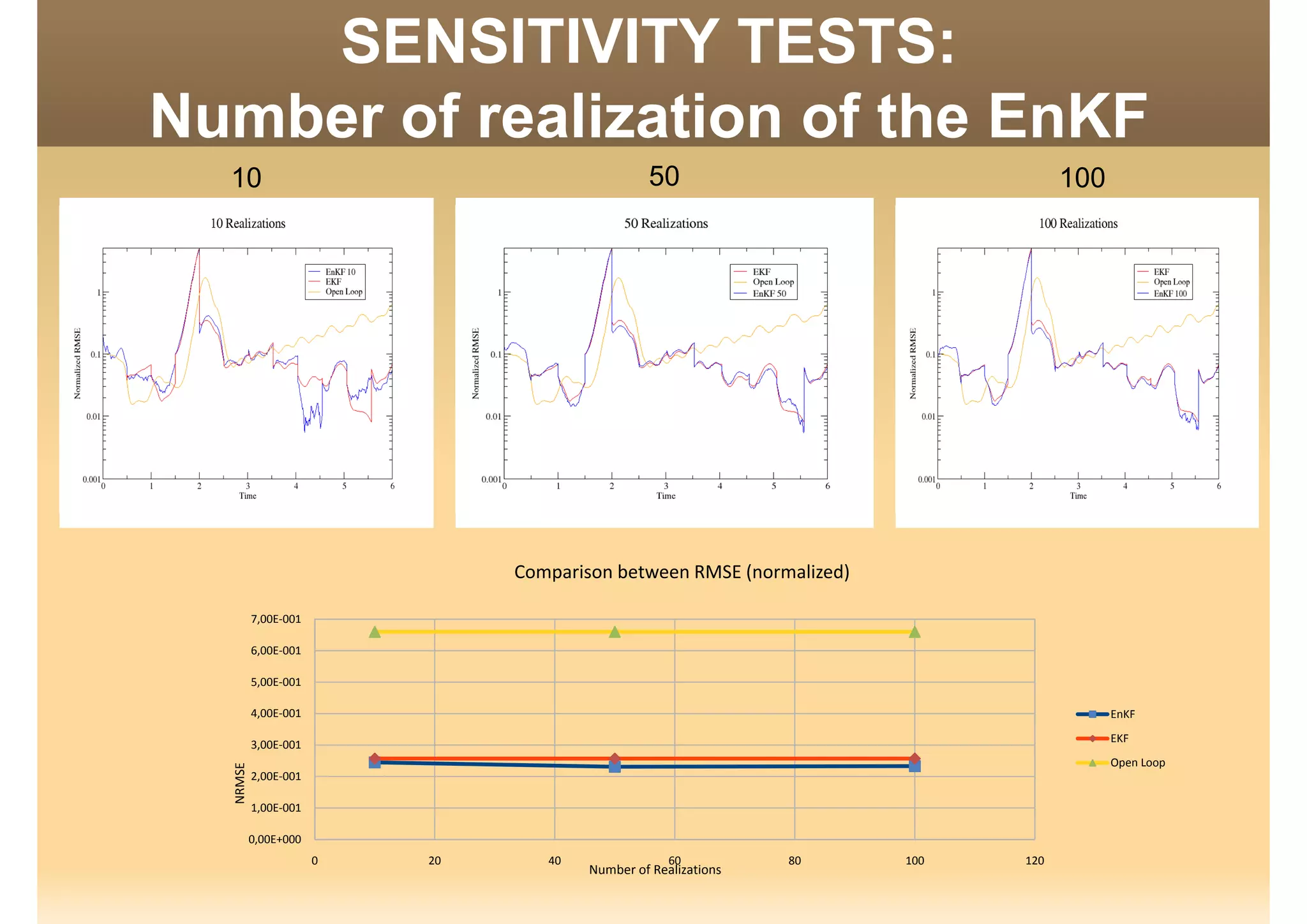


The document discusses the application of data assimilation techniques, specifically Ensemble Kalman Filter (EnKF) and Extended Kalman Filter (EKF), to the Lorenz model, which simulates thermal convection in the atmosphere. Sensitivity tests demonstrate that a realization number of 10 is optimal for the model, and that error rates increase with fewer observations. The authors suggest using these methods for real-world problems, such as weather prediction, while emphasizing future challenges in the field.
![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)














































