Autonomous Navigation and Mapping in Agriculture.pptx
2.
1. Path Planningand Obstacle
Avoidance Algorithms
Objective: Enable robots to navigate fields efficiently while avoiding
obstacles (rocks, trees, animals).
Key Algorithms:
• A (A-Star) Algorithm*
• Finds the shortest path between two points.
• Used in autonomous tractors for row-to-row navigation.
• Dijkstra’s Algorithm
• Computes optimal paths in grid-based maps.
• Applied in greenhouse robots for structured environments.
• RRT (Rapidly-exploring Random Trees)
• Efficient for dynamic, unstructured fields.
• Used in weed-removal robots to navigate around unpredictable
2. Localization andMapping
Techniques
Objective: Allow robots to know their position and create maps of
farmland.
Localization Methods:
• GPS/GNSS (RTK-GPS for centimeter-level accuracy)
• Used in autonomous tractors (e.g., John Deere’s AutoTrac).
• Visual Odometry (VO) / LiDAR Odometry
• Cameras/LiDAR estimate movement when GPS is unreliable (e.g.,
under tree canopies).
• IMU (Inertial Measurement Unit)
• Provides short-term position tracking when sensors fail.
5.
2. Localization andMapping
Techniques…
Mapping Techniques:
• SLAM (Simultaneous Localization and Mapping)
• LiDAR SLAM: Creates 3D maps for orchard robots.
• Visual SLAM (VSLAM): Used in greenhouse robots (e.g., Harvest
Automation).
• Grid Mapping (Occupancy Grids)
• Divides fields into navigable vs. obstructed areas.
Challenges:
• GPS-denied environments (e.g., dense crops, indoor farms).
• Changing landscapes (growing crops alter maps).
6.
3. Integration ofGPS and GIS in
Agricultural Robotics
GPS (Global Positioning System):
• Provides real-time location data.
• Applications:
• Auto-steering tractors (e.g., Case IH Autopilot).
• Drone-based field scanning for precision agriculture.
GIS (Geographic Information Systems):
• Stores and analyzes spatial data (soil quality, moisture, yield maps).
• Applications:
• Variable-rate seeding/fertilization (matching robot actions to
soil data).
• Crop health monitoring (overlaying drone images with GIS
maps).
7.
3. Integration ofGPS and GIS in
Agricultural Robotics
Integration Benefits:
• Precision Farming: Combines GPS-guided robots with GIS data for
optimized field operations.
• Data-Driven Decisions: Robots adjust tasks (e.g., watering, spraying)
based on GIS layers.
Example Workflow:
1.GPS guides a drone to scan a field.
2.GIS analyzes the data, identifying drought-stressed zones.
3.Autonomous irrigation robot targets only those areas.
8.
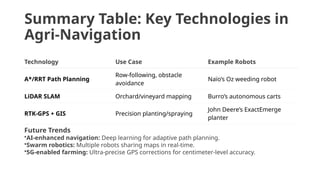
Summary Table: KeyTechnologies in
Agri-Navigation
Technology Use Case Example Robots
A*/RRT Path Planning
Row-following, obstacle
avoidance
Naïo’s Oz weeding robot
LiDAR SLAM Orchard/vineyard mapping Burro’s autonomous carts
RTK-GPS + GIS Precision planting/spraying
John Deere’s ExactEmerge
planter
Future Trends
•AI-enhanced navigation: Deep learning for adaptive path planning.
•Swarm robotics: Multiple robots sharing maps in real-time.
•5G-enabled farming: Ultra-precise GPS corrections for centimeter-level accuracy.