Recommended
PDF
X hago2 shortcoding 20110827
PDF
PPTX
PDF
PDF
PPT
User Interface Design As System Design2
PDF
PPT
PPT
Model seminar shibata_100710
PPT
Introduction to Algorithms#24 Shortest-Paths Problem
PDF
PDF
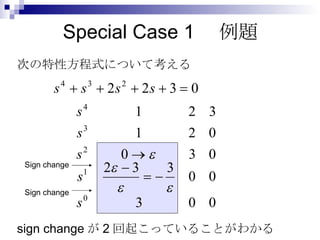
PDF
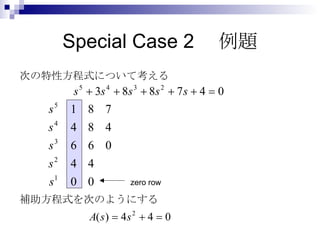
PPT
PDF
PDF
PDF
PDF
[読会]Long tail learning via logit adjustment
PDF
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
PDF
PDF
PPTX
KDD2015読み会 Matrix Completion with Queries
PPTX
第7回 KAIM 金沢人工知能勉強会 回帰分析と使う上での注意事項
PPTX
MASTERING ATARI WITH DISCRETE WORLD MODELS (DreamerV2)
PPT
JOIseminor 2008 Presentation by quolc
More Related Content
PDF
X hago2 shortcoding 20110827
PDF
PPTX
PDF
PDF
PPT
User Interface Design As System Design2
PDF
PPT
Similar to Automatic Control 第6回
PPT
Model seminar shibata_100710
PPT
Introduction to Algorithms#24 Shortest-Paths Problem
PDF
PDF
PDF
PPT
PDF
PDF
PDF
PDF
[読会]Long tail learning via logit adjustment
PDF
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
PDF
PDF
PPTX
KDD2015読み会 Matrix Completion with Queries
PPTX
第7回 KAIM 金沢人工知能勉強会 回帰分析と使う上での注意事項
PPTX
MASTERING ATARI WITH DISCRETE WORLD MODELS (DreamerV2)
PPT
JOIseminor 2008 Presentation by quolc
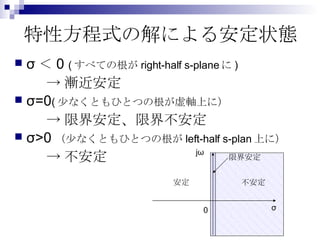
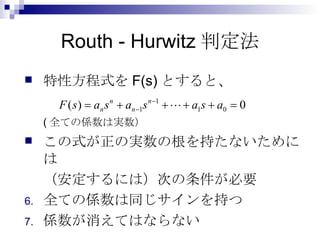
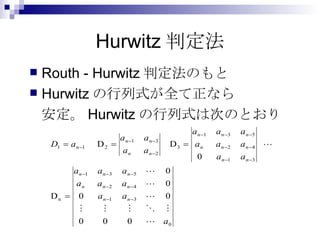
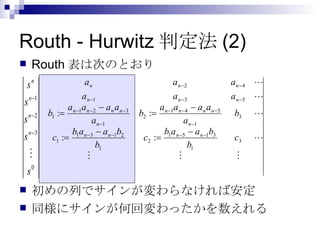
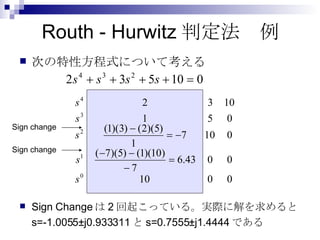
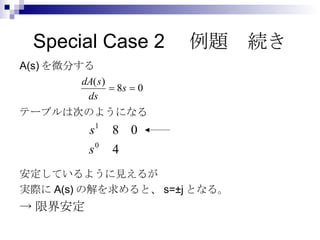
Automatic Control 第6回 1. 輪講発表 第 7 回 6 月 18 日 教材: AUTOMATIC CONTROL SYSTEMS( 第 7 版 ) 著者 : BENJSMIN C. KUO 出版社 :PRENTICE HALL 担当範囲 : P327 ~ P360 担当者: 吉田新吾 学籍番号:15801078 出席番号:3H75 2. 3. BIBO (Bounded-Input Bounded-Output) Stability 入力 u(t) 、 出力 y(t) 、インパルス g(t) として 時不変の線形システムを作ると zero I.C. において BIBO Stability となる。 畳み込み積分すると次のとおり 4. BIBO Stability(2) 今、両辺絶対値を取って |u(t)| が有限だとすると |y(t)| が有限となる。すると、 も有限といえる。 このことにより、インパルス応答を調べれば システムが安定かどうかを調べることができる 5. 6. 特性方程式の解と安定性 (2) 特性方程式の解が right-half s-plane にあれば、 となる 先ほどの式は次のようになる。 このことは BIBO stability に反する -> BIBO stability において 特性方程式の解がシステムの安定性を決める 7. 8. 9. 10. 特性方程式の解による安定状態 σ<0 ( すべての根が right-half s-plane に ) ->漸近安定 σ=0 ( 少なくともひとつの根が虚軸上に) ->限界安定、限界不安定 σ>0 (少なくともひとつの根が left-half s-plan 上に) ->不安定 0 σ jω 限界安定 安定 不安定 11. 12. Routh - Hurwitz判定法 特性方程式を F(s) とすると、 ( 全ての係数は実数) この式が正の実数の根を持たないためには (安定するには)次の条件が必要 全ての係数は同じサインを持つ 係数が消えてはならない 13. 14. 15. Routh - Hurwitz判定法 例 次の特性方程式について考える Sign change Sign change Sign Change は 2 回起こっている。実際に解を求めると s=-1.0055±j0.933311 と s=0.7555±j1.4444 である 16. Special Case 1 初めの列に0が出てきて、 他の要素は0でない場合 0となるところを任意の小さな正の数εを 置きその後を計算する。 17. Special Case 1 例題 次の特性方程式について考える sign change が 2 回起こっていることがわかる Sign change Sign change 18. Special Case 2 : zero row 全ての行の要素が 0 となる場合次のような検討をする ひとつ上の行を補助方程式 A(s)=0 としてとる A(s) を s について微分する その係数を zero row の係数としておき判定を続ける zero row が起こると補助方程式の解が 原点に対し対象となる -> 安定性の判定は補助方程式の解を解いて決める 19. 20.






















![[読会]Long tail learning via logit adjustment](https://cdn.slidesharecdn.com/ss_thumbnails/long-taillearningvialogitadjustment-211229095016-thumbnail.jpg?width=640&height=640&fit=bounds)







