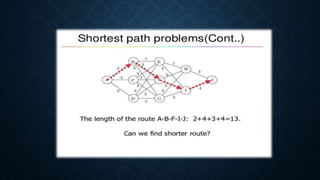
This document discusses applications of dynamic programming including the 0/1 knapsack problem, mathematical optimization problems, shortest path problems, reliability design problems, longest common subsequence problems, and applications in flight control and robotics control. Dynamic programming breaks large problems into smaller overlapping subproblems and builds optimal solutions incrementally. It provides efficient algorithms for optimization problems like finding the highest profit selection of items within a weight limit or discovering the lowest cost path between points.


![EXAMPLES:-
• Item 1: Weight = 2, Value = 10
• Item 2: Weight = 3, Value = 5
• Item 3: Weight = 5, Value = 15
• Item 4: Weight = 7, Value = 7
• Item 5: Weight = 1, Value = 6
• V(i, W) = max { V(i-1, W), V(i-1, W - w[i]) + v[i] }
W 0 1 2 3 4 5 6 7 8 9 10
Item1 0 0 10 10 10 10 10 10 10 10 10
Item2 0 0 10 10 10 15 15 15 15 15 15
Item3 0 0 10 10 10 15 15 15 15 15 20
Item4 0 0 10 10 10 15 15 17 17 17 22
Item5 0](https://image.slidesharecdn.com/applicationofdynamicprogramming-230802040609-35800f32/85/application-of-dynamic-programming-pptx-5-320.jpg)








































![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)





![7.__Developing_a_Research_Proposal[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/7-260131073037-df92dd7d-thumbnail.jpg?width=640&height=640&fit=bounds)
