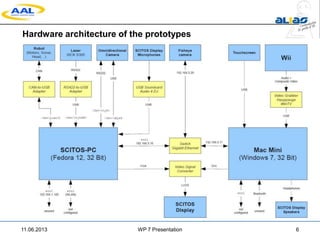
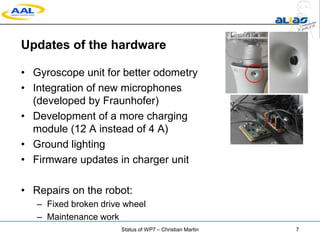
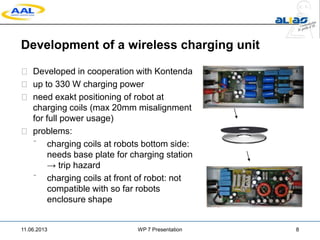
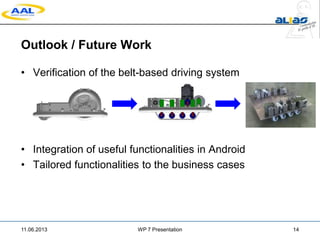
This presentation summarizes the goals, achievements, hardware, and software of Work Package 7 for the ALIAS project. The goals were to implement pilots and integrate hardware and software modules. Key achievements included developing robots, adapting middleware, and integrating software for field trials. Main hardware included robot components like sensors and a display. Software was updated including a new middleware and 3D collision avoidance. Issues addressed hardware problems and limitations of the current prototype. Future work includes verifying new driving systems and integrating useful tablet functions for business cases.