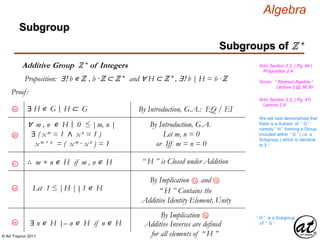
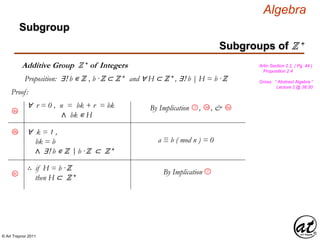
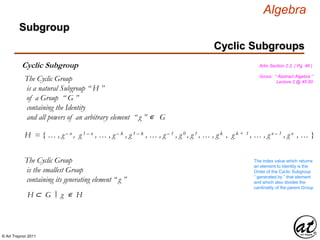
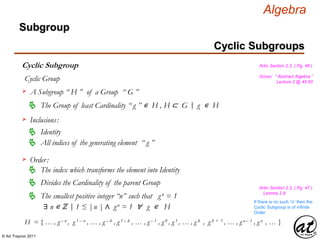
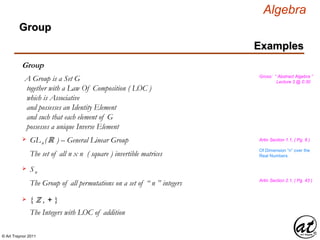
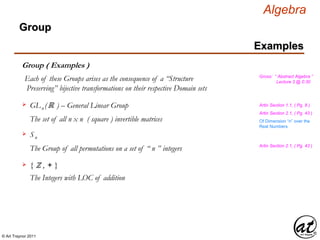
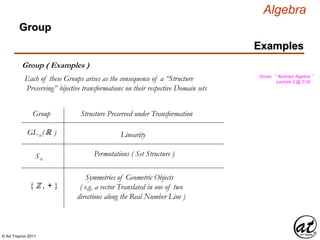
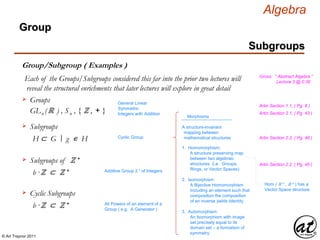
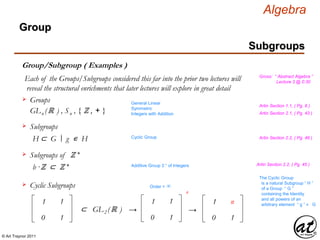
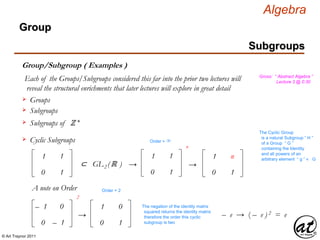
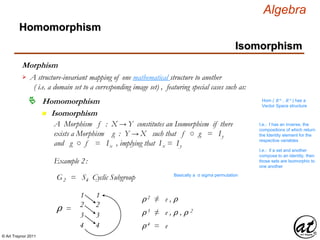
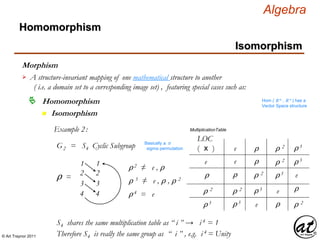
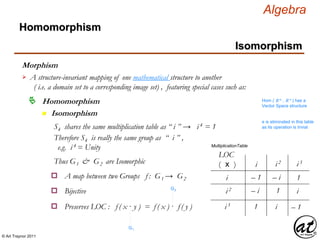
The document discusses subgroups of groups, with examples. It defines a subgroup as a subset of a group that is closed under the group's operation and contains inverses and identities. Examples of groups given include the general linear group of invertible matrices, the symmetric group of permutations, and the integers under addition. Subgroups are discussed, including cyclic subgroups generated by a group element and its powers. Specific subgroups of the positive integers under addition are analyzed in detail.










![© Art Traynor 2011
Algebra
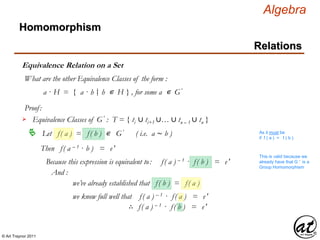
Equivalence Relation on a Set
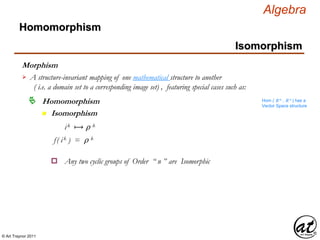
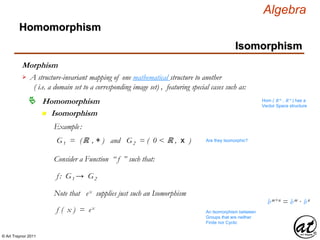
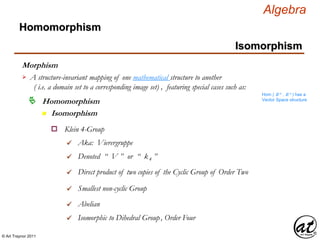
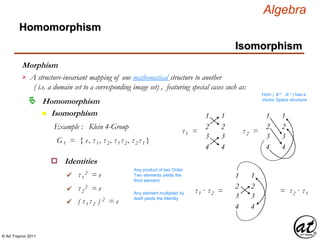
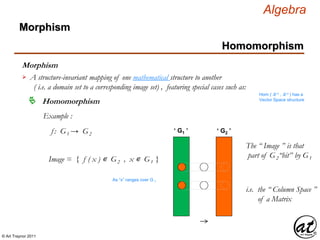
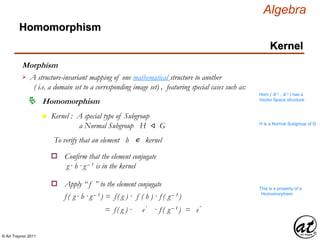
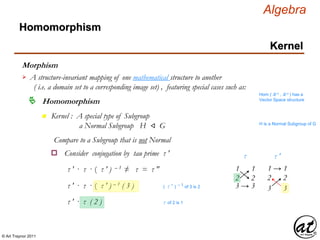
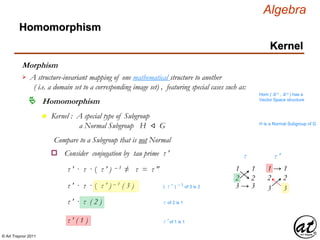
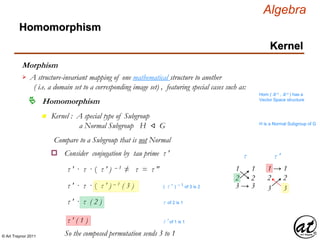
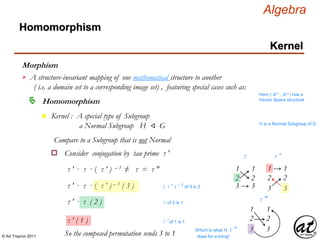
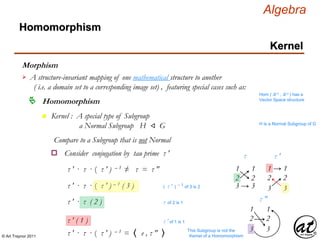
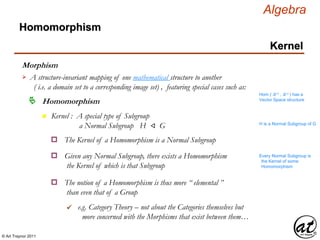
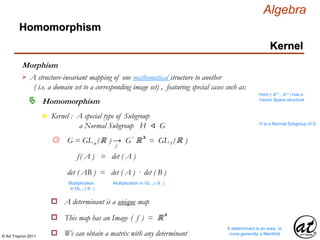
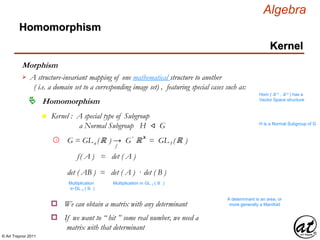
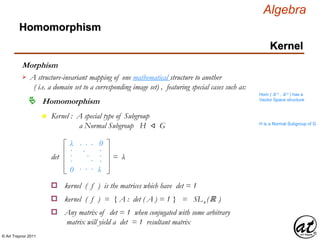
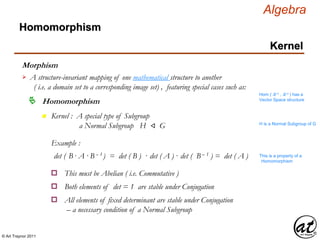
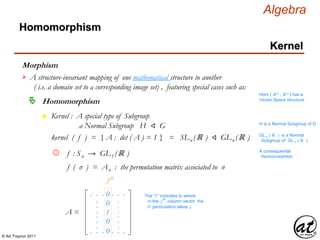
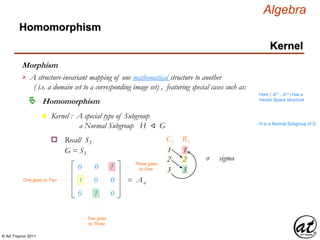
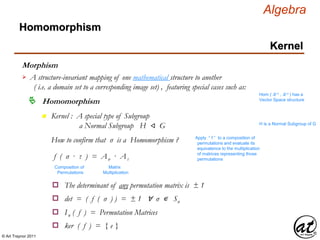
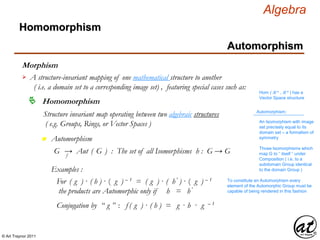
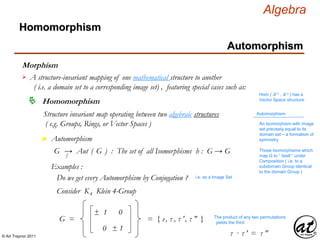
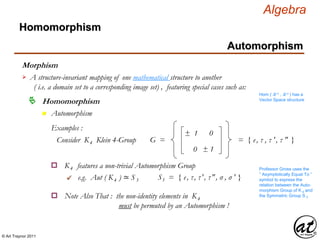
Homomorphism
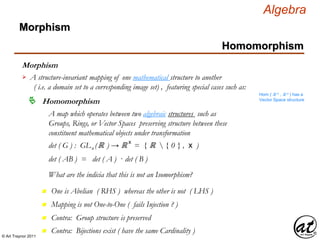
Structure
Corollary( more Generally ):
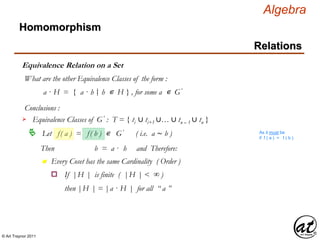
The Left Coset of a ∊ G , a · H = { a · h h ∊ H }|:
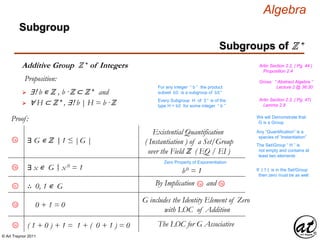
Proposition:
The Subsets { a · h } are:
Disjoint and partition G
In Set Theoretic Bijection with “ H ”
So the new Equivalence Relation arising in consequence thereof is :
The Index of “ H ”
Which might be infinite…
n The number of distinct Left Cosets
n The number of Equivalence Classes
Denoted:
An arbitrary Subgroup of “ G ”
Supergroup
Index of “ H ” in “ G ”[ G : H ]](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-97-320.jpg)
![© Art Traynor 2011
Algebra
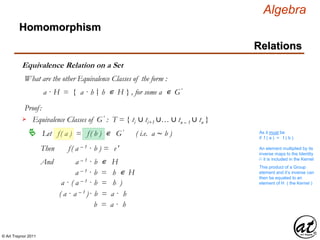
Equivalence Relation on a Set
Homomorphism
Structure
Corollary( more Generally ):
The Left Coset of a ∊ G , a · H = { a · h h ∊ H }|:
Proposition:
The Subsets { a · h } are:
Disjoint and partition G
In Set Theoretic Bijection with “ H ”
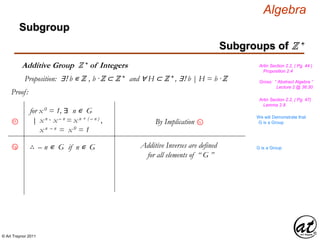
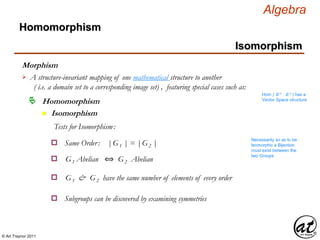
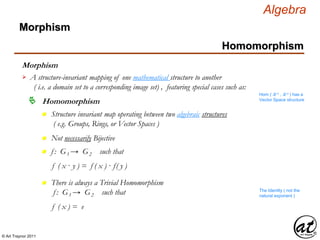
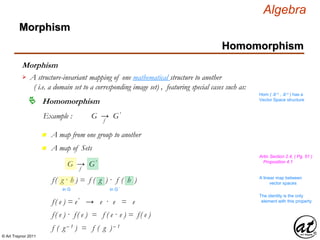
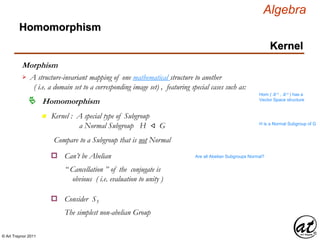
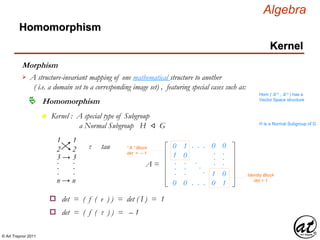
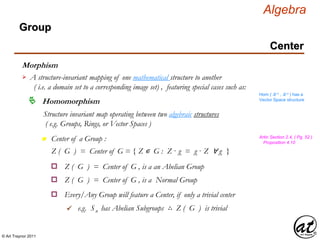
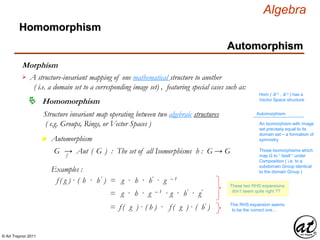
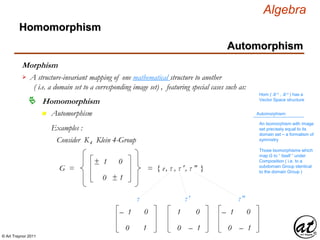
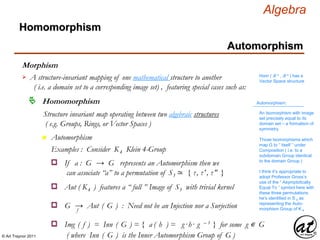
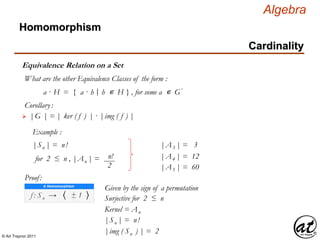
Corollary( more Generally ):
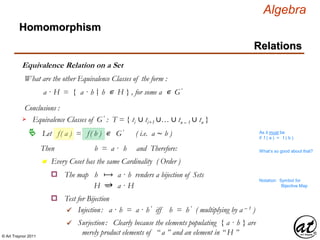
|G | = | H | · [ G : H ]
Just the Index ( not the
Cardinality of the Index)
As the equation suggests, the
Index as well as the Cardinality of
“ H ” divide the Cardinality of “ G ”
Represents the number of Cosets
in the Normal Group which is the
same as the Image
This is because we’ve divided
“G” into equal parts, the number
of parts being the Index
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of
elements in each
“part” is the
Cardinality of “H”](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-98-320.jpg)
![© Art Traynor 2011
Algebra
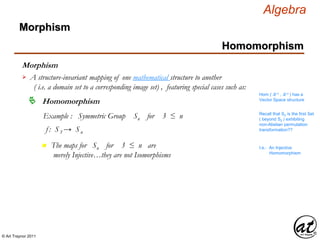
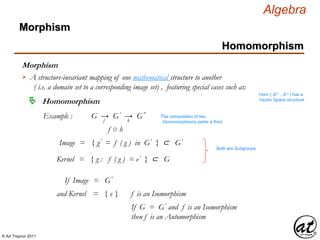
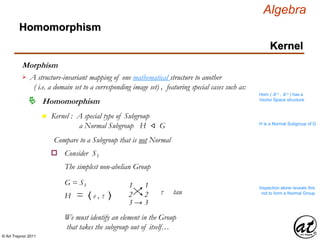
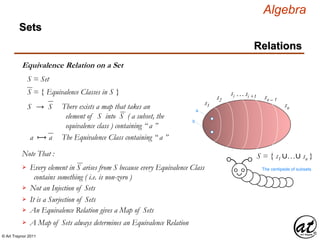
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
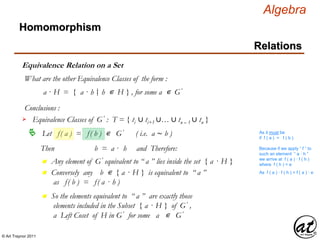
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of
elements in each
“part” is the
Cardinality of “H”
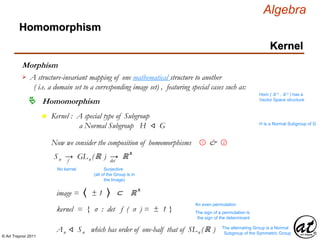
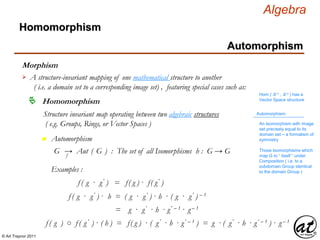
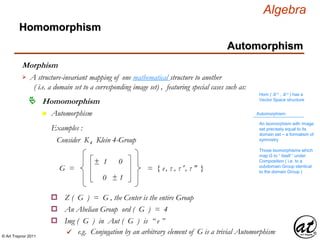
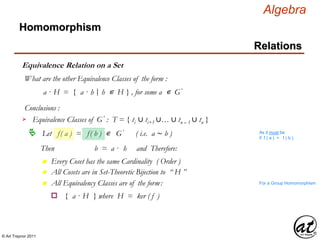
|G | = | H | · [ G : H ]
This relationship was first noted by Lagrange at
the conclusion of the 18th century
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
It constitutes the first formula in Group Theory
No formal education at age 17 when he began a
correspondence with Euler in St. Petersberg
Read books in his rich Uncle’s library
In his third letter he set out all that had
then been known about Calculus
Euler arranged for his formal education](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-99-320.jpg)
![© Art Traynor 2011
Algebra
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of
elements in each
“part” is the
Cardinality of “H”
|G | = | H | · [ G : H ]
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
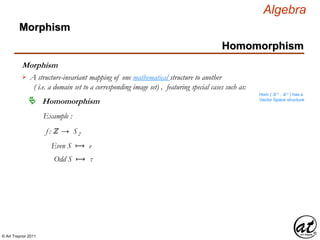
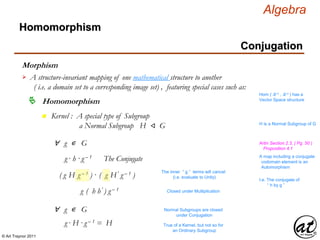
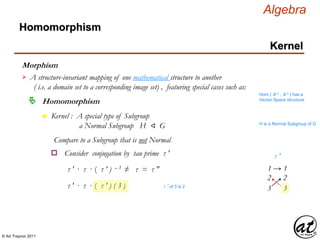
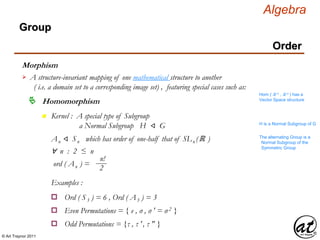
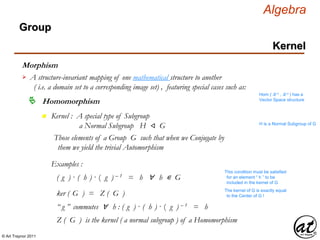
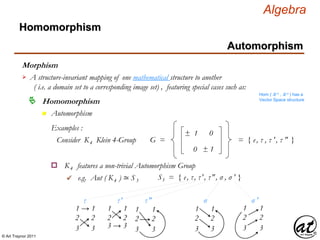
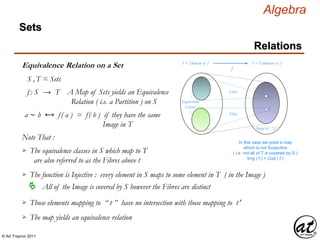
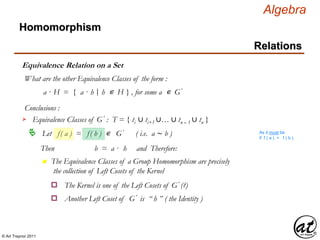
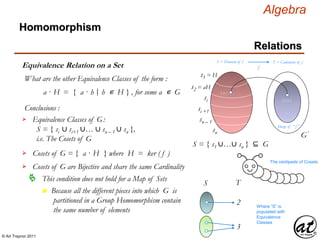
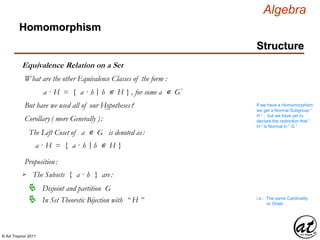
Lagrange’s Theorem
If |G | is finite, and g ∊ G then | g | divides |G |
i.e.: the smallest power m g m = e|:
Proof: Let “ H ” be the Subgroup generated by “ g ”
which contains all the elements { e, gi ,…, gm – 1 } :
H = 〈 g 〉 = 〈 e , g1, g2,…, gm – 1 〉
| H | = m = Cardinality of “ g ”
And since the Cardinality of any Subgroup of
a Finite Group divides the Cardinality of the
Group (by considering the decomposition into
Cosets ) it is certainly true that | H | divides
the Order of the Group , which is the
Cardinality of the Element](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-100-320.jpg)
![© Art Traynor 2011
Algebra
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of elements in each
“part” is the Cardinality of “H”
|G | = | H | · [ G : H ]
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
Lagrange’s Theorem
If |G | is finite, and g ∊ G then | g | divides |G |
i.e.: the smallest power m g m = e|:
Proof: Let “ H ” be the Subgroup generated by “ g ”
which contains all the elements { e, gi ,…, gm – 1 } :
H = 〈 g 〉 = 〈 e , g1, g2,…, gm – 1 〉
| H | = m = Cardinality of “ g ”
Note that the inverses of the generating element
are also in the Cyclic Subgroup
H = 〈 g 〉 = 〈 e , g1, g2,…, g – 2,( gm – 1 = g– 1) 〉](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-101-320.jpg)
![© Art Traynor 2011
Algebra
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of elements in each
“part” is the Cardinality of “H”
|G | = | H | · [ G : H ]
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
Lagrange’s Theorem ( Corollary )
Let “ G ” be a finite group, with |G | = p “ p ” is prime number…
i.e. a Group of Prime Order
Then “ G ” is a Cyclic Group, generated by
any g ∊ G with G ≠ e
Furthermore, the only Subgroups of “ G ” are G & e
So if we have a Group of prime order then the only
Subgroups are the entire Group and the Group
If not of Prime Order, the Group can have
a plethora of Subgroups
This is a nexus of Group Theory with Number Theory
because the Orders of Groups being certain numbers will
provide useful, more generalizable information about the
Group structure itself…](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-102-320.jpg)
![© Art Traynor 2011
Algebra
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of elements in each
“part” is the Cardinality of “H”
|G | = | H | · [ G : H ]
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
Lagrange’s Theorem ( Corollary )
Let “ G ” be a finite group, with |G | = p “ p ” is prime number…
i.e. a Group of Prime Order
Then “ G ” is a Cyclic Group, generated by
any g ∊ G with G ≠ e
Furthermore, the only Subgroups of “ G ” are G & e
Proof:
Let G ≠ e in “ G”
The order of “ g ” divides “ p ” , and is not “ 1 ”
( since only “ e ” has an order = 1 )
Hence if “ p ” is prime, its only divisors are “ p ” & “ 1 ”
and the Order of “ g ” is thus p ( i.e. | g | = p )](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-103-320.jpg)
![© Art Traynor 2011
Algebra
1736 – 1813
Joseph-Louis Lagrange
Kingdom of Sardinia
City of Turin
Homomorphism
Structure
Equivalence Relation on a Set
G = { si }
s1
s2
si …si +1 sn – 1
sn
# of Parts = The Index
[ G : H ]
∪i = 1
n
H a ·h b ·h … n – 1 ·h n ·h
The number of elements in each
“part” is the Cardinality of “H”
|G | = | H | · [ G : H ]
The Order (Cardinality) of “ G ”
is the Order of “ H ” times the
number of parts, i.e.: The Index
Lagrange’s Theorem ( Corollary )
“ p ” is prime number…
i.e. a Group of Prime OrderProof:
Let G ≠ e in “ G”
The order of “ g ” divides “ p ” , and is not “ 1 ”
( since only “ e ” has an order = 1 )
Hence if “ p ” is prime, its only divisors are “ p ” & “ 1 ”
and the Order of “ g ” is thus p ( i.e. | g | = p )
〈 g 〉 ⊂ G
Order = “ p ”
The Subgroup
generated by “ g ”
If we have Finite Sets
of the same Cardinality
then they are equal !
i.e. 〈 g 〉 = G](https://image.slidesharecdn.com/5ee4a828-2093-4348-a76e-c3cec2555064-160620085208/85/Algebra-02-_160229_01-104-320.jpg)