Документ описывает допустимую погрешность измерения датчиков динамометрирования и основывается на принципах механики и термодинамики. Подробно рассматривается упругость материалов, их деформация под нагрузками и факторы, влияющие на точность измерений, такие как изменение температуры и свойств материалов. Заключительным выводом является то, что погрешность измерений может достигать ±30%, что ставит под сомнение надежность датчиков для точных измерений.
![Допустимая погрешность измерения датчиков
динамометрирования, устанавливаемых на полированный
шток.
Работа данного типа датчиков основана на том, что полированный шток
при ослаблении силы, направленной вдоль оси, сжимается. Такое возможно
благодаря его собственной упругости – способности восстанавливать форму
после снятия деформирующей нагрузки. Изменяя форму, металл стремится
сохранить плотность, поэтому растягивание и сжатие цилиндрического штока
вызывает изменение площади его сечения. Если принять сечение штока кругом,
то можно говорить о связи диаметра данного круга с растягивающим шток
усилием. Изменение диаметра регистрируется датчиком динамометра.
Вникнем в свойства тел, обладающих упругостью. Согласно Второму
началу термодинамики, все процессы, в том числе растяжения-сжатия
предметов, проходят с частичной потерей системы начальной энергии. Это
следует понимать так, что после снятия нагрузки, вызвавшей деформацию,
любое тело не может в самопроизвольном процессе вернуть себе былой вид.
Некоторые материалы не обладают упругостью вообще, например, пластилин. О
таких, как алюминий, можно спорить – чуть-чуть имеет или нет. А есть
материалы, упругость которых ярко выражена, это, например, резина,
пружинная сталь. Упругость характеризуется коэффициентом, который
определяется отношением высоты подскока шарика к высоте падения. И тут
наблюдается парадокс: названные выше в примере упругих тел материалы
сильно отстают от тех, упругость которых в быту обсуждать не принято –
стекло, слоновая кость. Объяснение простое: деформация резины и пружины
легко заметна, деформировать кусочек холодного стекла, наблюдая процесс
невооруженным глазом, невозможно.
Из выше изложенного следует, что
- для всех материалов деформация зависит не только от прилагаемого усилия, но
и от направления воздействия - увеличивается или уменьшается деформация;
- все материалы частично упруги лишь до некоторого предела, после которого
они или ломаются, или не возвращают форму.
Деформация металлов подчиняется закону Гука
SE
lF
l
⋅
⋅
=∆ , (1),
где ∆l [м] – удлинение прутка, F [Н]– растягивающая сила, l [м] – начальная
длина прутка, E [Па] – модуль упругости, S [м 2
] – площадь сечения прутка. Из
данной формулы следует, что в связи утонением прутка при растяжении, сила,
вызывающая условную единицу деформации, с увеличением нагрузки
уменьшается. Другими словами - скорость удлинения превышает рост нагрузки.
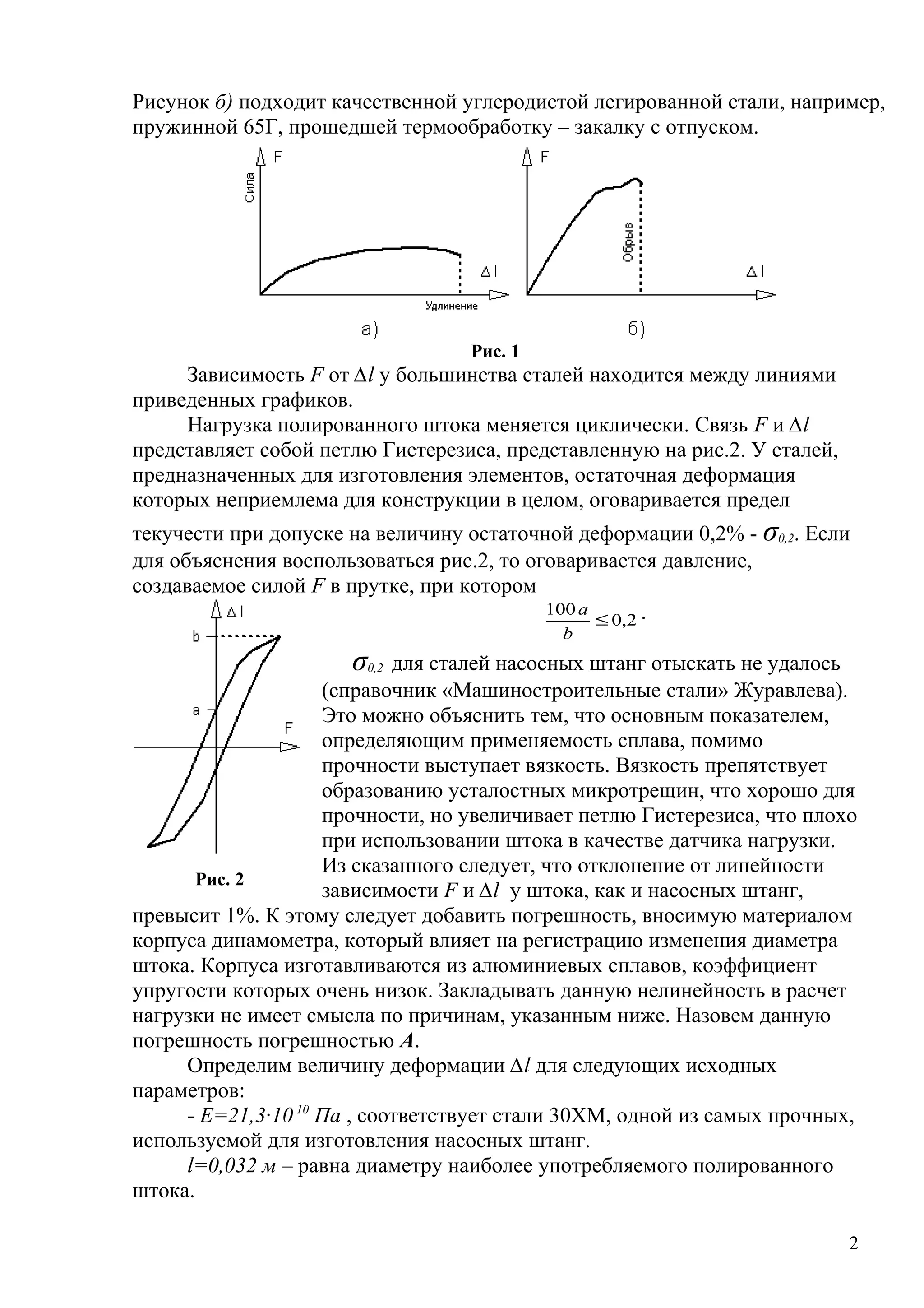
У сталей в этом однообразия нет. Если изобразить связь удлинения с нагрузкой
в виде графиков, то на рис.1 показаны их крайние формы. Рисунок а)
соответствует малоуглеродистой (менее 0,1%) стали. Из такой делают гвозди.
1](https://image.slidesharecdn.com/add-on-dynamometer-error-130721041829-phpapp01/75/Add-on-dynamometer-error-1-2048.jpg)