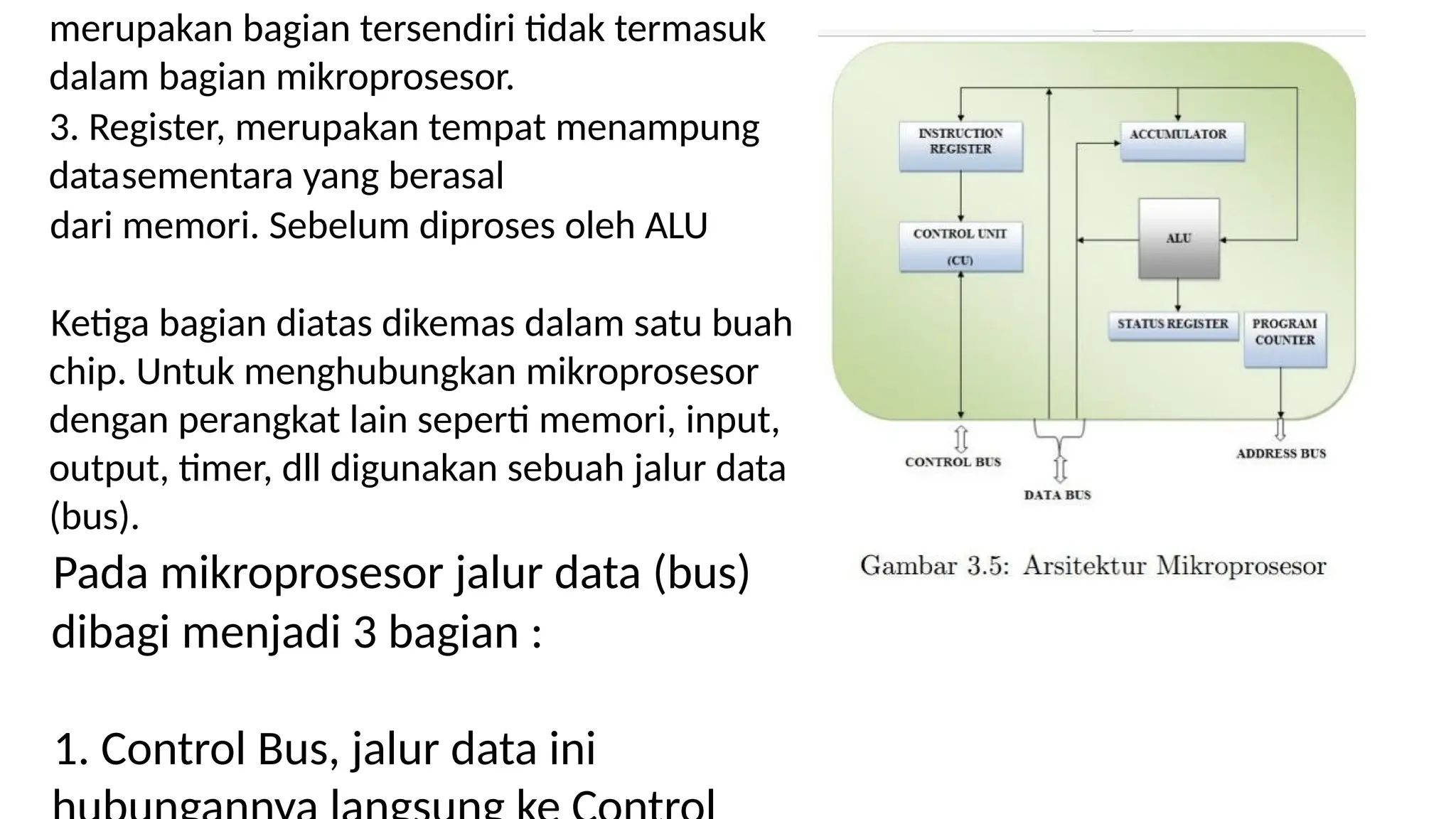
Dokumen ini adalah modul pengantar mikrokontroller pada embedded system yang mencakup sejarah, perbedaan antara mikrokontroler dan mikroprosesor, analisis arsitektur, serta bahasa pemrograman terkait mikrokontroler Atmega 328 (Arduino). Mikrokontroler, yang menggabungkan prosesor, memori, dan periferal dalam satu chip, memiliki kategori berdasarkan arsitektur seperti CISC dan RISC. Contoh praktis penggunaan mikrokontroler termasuk Arduino Uno yang populer dalam berbagai aplikasi elektronika.