소개
도정찬
Beard, Randal W."Small unmanned aircraft: theory and practice", Chapter 1. Introduction
2019. 12. 04
2.
1.1 시스템 아키텍처
이 책은 독자들이 무인 비행체의 자율 비행과 제어 분야 개발 연구를 할수 있는 것을 목표로 한다. 자율 비행과 준 자율 비
행이 요구되는 소프트웨어 알고리즘 설계에 초점을 맞추고, 이 분야에서 일하기 위해서는 좌표 변환, 비행 동역학, 오토파일
럿 설계, 상태 추정, 경로 계획, 그리고 컴퓨터 비전 등 다양한 분야들을 알아야 한다. 이 책은 MAV(Miniature Air Vehicle)이
라 부르는 소형/초소형 비행체 개발과 관련된 필수적인 주제들을 다루고자 한다.
소프트웨어 아키텍처는 그림 1.1와 같으며, 무인 비행체(unmanned aircraft)라 표기된 블록은 6자유도(six-degree-of-
freedom, DOF)를 가진 물리적 비행체로 서보 제어 입력(엘리베이터, 에일러론, 러더, 쓰로틀)과 바람과 요란(disturbances)
에 응답을 보여준다.
수학적 모델(mathematical models)을 위해서는 고정익 비행기에 대해 이해해야 하며 2~5장 그리고 9장에서 다룬다. 2장에
서는 좌표계와 좌표계간 변환에 대해 설명한다. MAV에 대한 변수들은 관성 좌표계에서 다루나, 센서 관측과 구동기에 의한
힘과 토르크는 바디 프레임에서 다룬다. 3장은 강체의 기구학과 동역학 운동 방정식을 구하며, 4장에서는 고정익 비행기에
작용하는 항공동역학적 힘과 모멘트를 설명한다.
3.
5장에서는 3장과4장에서 배운 내용으로 MAV의 6자유도와 12개의 상태변수, 비선형 동역학 식을 구한다. 비행체 제어기의
설계와 해석은 선형 모델로 쉽게 할수 있다. 선형 모델은 트림의 편차에 대해 구하며, 전달함수와 상태 공간 모델을 5장에서
구한다.
그림 1.1의 오토파일럿 블록은 저래밸 제어 알고리즘으로 롤과 피치각, 대기속도(airspeed), 고도, 방위각(course heading)을
유지한다. 6장에서는 오토 파일럿 제어기를 설계하기 위한 폐쇄 루프들을 소개한다. 중첩된 형태의 제어기 루프들은 닫힌
형태를 하고 있으며, 내부 루프는 롤과 피치각을 유지 시키고, 바깥 루프는 대기속도와, 고도, 방위를 유지시킨다.
오토파일럿과 고래밸 블록은 가속도계, 자이로계, 압력센서, 지자기계, GPS 수신기 같은 센서들을 필터링 하여 추정한 값을
이용한다. 이 센서와 수학적 모델은 7장에서 설명한다. 표준 센서를 사용하여 소형 무인 항공기의 모든 상태를 측정하기는
어려우므로, 상태 추정은 매우 중요한 역활을 한다. MAV의 효율적인 상태 추정 기술에 대해 8장에서 설명한다.
1.1 시스템 아키텍처
4.
그림 1.1.위 그림은 이 책에서 다루는 시스템 아키첵처로, 경로 계획기(path planner)는 장애물이 있는 공간을 지나는 직선
이나 듀빈스 경로(Dubins path)를 생성한다. 경로 매니저(manager)는 웨이포인트 경로를 따르도록 조종하기 위해 궤도 추
종(orbit following)과 직선 경로 추종(straight-line path)로 전환한다. 경로 추종(path following) 블록은 기체를 제어하는 저
래밸의 오토파일럿 명령들을 만들어 낸다. 각 블록들은 센서 필터릉을 통해 추정한 상태들을 이용한다.
1.1 시스템 아키텍처
시스템 아키텍처
듀빈스 경로
5.
오토 파일럿과상태 추정 기술를 이용한 완전한 동역학 모델은 고차원의 매우 복잡한 비선형 방정식의 시스템 형태로 나타
낸다. 이 시스템의 전체 모델은 너무 복잡해서 고래밸의 가이드 알고리즘을 개발할 수 없다. 그러므로 9장에서는 이 시스템
의 폐쇄 루프 동작을 설계하는 저차수(low-order)의 비선형 방정식을 구한다. 이 모델은 가이드 알고리즘을 개발하기 위해
이후 챕터들에서 서술한다.
MAV의 주요 목표 중 하나로 바람부는 환경에서 비행이 있으며, MAV는 일반적으로 20~40 mph의 대기 속도를 가지며 지
면(above ground level, AGL)으로부터 수백 피트에서 바람 속도는 항상 10 mph를 넘으므로, MAV는 이러한 바람 환경에서
효율적으로 조종할 수 있어야한다. 기존의 로봇 공학에서 사용하던 궤적 추적 방법은 MAV에서 잘 동작하지 않으며, 알수없
으며 변하는 바람의 영향에 의해 대지속력(ground speed)의 변화를 다루기가 어렵다. 대신 경로 추종(path-following) 방법
은 단순히 기체를 원하는 경로에 유지시키는 것으로 비행 시험에서 효율성을 확인하였다. 10장에서는 그림 1.1의 경로 추종
방법에 대해 설명하고 성능을 확인할 것이다.
1.1 시스템 아키텍처
6.
우리는 주로직선 경로와 원형 궤도를 주로 다룰 것이며, 다른 경로들은 이러한 직선과 원형 경로를 통해 만들 수 있다. 그
림 1.1의 경로 매니저 블록은 웨이 포인트 설정들(위치와 방위)을 MAV가 따라갈 수 있는 직선 경로와 원형 궤도들로 변환
하며, 경로 계획 문제를 단순하게 만들며 경로 플래너가 직선 경로나 듀빈스 경로를 생성한다. 11장에서는 경로 매니저를
설명하며, 12장에서는 경로 플래너를 설명한다. 경로 계획에서 두 가지의 문제를 고려해야 하며, 첫 번째는 점 대 점 알고리
즘으로 장애물을 피해 시작 점에서 목적 지점까지 조종하는 것이고, 두 번째 문제는 검색 알고리즘으로 갈수 있는 곳인지
갈수 없는 곳인지 다루어야 한다.
대부분의 MAV 어플리케이션에서는 전자광학/적외선(electro-optical/infrared, EO/IR) 카메라를 사용하며, 카메라를 통해 사
용자에게 보낼 시각 정보를 얻는다. MAV의 적재 하중은 제한되어있어 이 카메라는 항행과 가이드, 제어에 활용되며, 효율
적으로 카메라를 사용하기 위해 연구들이 활발히 이루어 지고 있다.
1.1 시스템 아키텍처
7.
13장에서는 카메라를이용하여 지리 위치(geolocation) 추정이나 영상 기반의 착륙 등 다양한 활용들에 대해 살펴 본다. 지
리 위치추정에서는 일련의 이미지를 통해 물체의 세계 좌표계 상 위치를 추정하며, 영상 기반 착륙은 MAV로 캡처한 동영
상으로 식별된 목표 지점으로 안내한다. 이 기술들을 이해해서 더 다양한 영상 기반의 가이드방법에 대해 살펴 볼수 있을것
이다.
13장에서 우리는 그림 1.2.와 같이 기존의 경로 계획기 블록이 영상 기반 가이던스로 바뀐 소프트웨어 아키텍처를 사용할
것이다. 그러나 영상 기반 가이던스는 경로 계획기와 동일한 역활을 한다.
1.1 시스템 아키텍처
8.
그림 1.2.영상 기반 항행, 가이던스, 제어 시스템 아키텍처. 카메라가 추가되었고, 경로 계획기가 영상 기반 가이던스 블록
으로 대체되었다.
1.1 시스템 아키텍처
9.
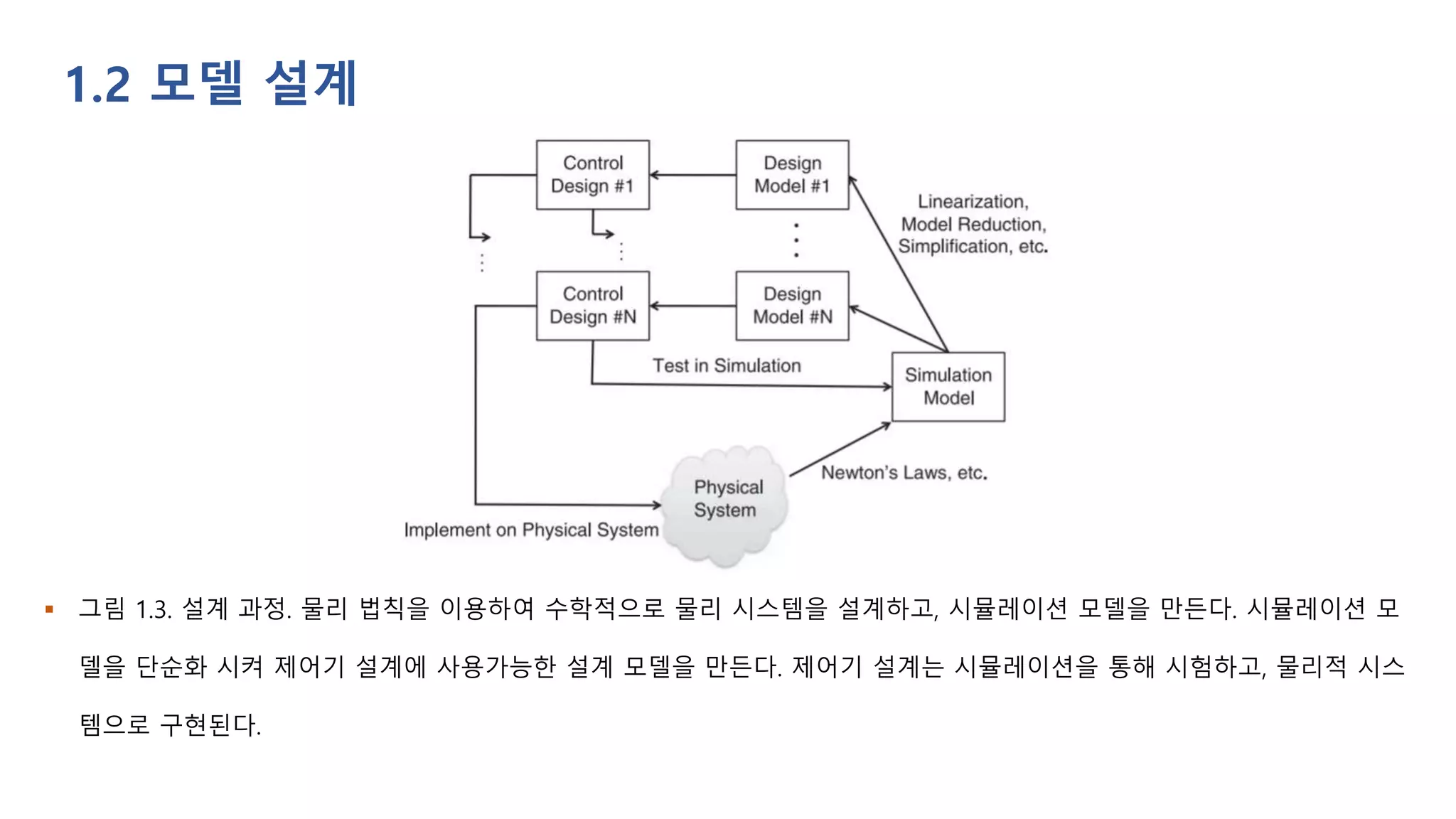
그림 1.3.설계 과정. 물리 법칙을 이용하여 수학적으로 물리 시스템을 설계하고, 시뮬레이션 모델을 만든다. 시뮬레이션 모
델을 단순화 시켜 제어기 설계에 사용가능한 설계 모델을 만든다. 제어기 설계는 시뮬레이션을 통해 시험하고, 물리적 시스
템으로 구현된다.
1.2 모델 설계
10.
이 책에서전반적으로 다루고자 하는 설계 철학은 그림 1.3에서 도식적으로 표현했다. 무인 항공기가 동작하는 환경은 그림
1.3에서 "물리적 시스템"으로 나타냈고, 이는 액추에이터(제어 플랩, 프로펠러)와 센서(IMU, GPS, 카메라 등)으로 이루어진
다. 설계 과정의 첫 번째 단계로 비선형 미분 방정식으로 물리적 시스템을 설계해야한다. 이 과정에서는 근사와 단순화가
필요하며, 물리적 시스템의 중요한 특성들을 수학적으로 표현해야한다.
이 책에서는 물리적 시스템의 설계에서 강체 기구학과 동역학(3장), 항공역학적인 힘과 모멘트(4장), 그리고 센서(7장)에서
다룬다. 결과 모델을 그림 1.3에서 시뮬레이션 모델이라 부르며 물리 시스템을 높은 정확도로 컴퓨터 시뮬레이션으로 구한
것이 된다. 그러나 이 시뮬레이션 모델은 물리 시스템의 근사일 뿐이고, 시뮬레이션 환경에서 효율적이지 실제 anff리 시스
템에서 적절히 동작하지 않을 수 있다.
1.2 모델 설계
11.
시뮬레이션 모델은비선형, 고치수이며, 수학적으로 너무 복잡하여 제어기를 설계하는데 유용하지는 않다. 그러므로 설계를
가능하게 하기 위해서 시뮬레이션 모델은 간략화와 선형화되어 처자수의 설계 모델을 만든다. 어느 물리적 시스템에 대해,
설계 과정의 측면에서 볼때 여러가지의 설계 모델이 존재 할 수 있다. MAV의 경우 저래밸의 제어기나 고래밸의 가이던스
등 다양한 설계 모델을 사용할 수 있다.
5장에서 우리는 기체 동작을 종방향(피칭, 클라이밍) 동작과 횡방향(롤링과 해딩) 동작으로 나눌 수 있으며, 각 운동 타입에
따라 다른 설계 모델을 가질 수 있다. 5장에서 구현한 선형 설계 모델은 6장에서 기체의 대기속도, 고도, 방위각을 제어하는
저래밸의 오토파일럿 루프 개발에 사용된다. 8장에서는 센서를 사용하는 오토파일럿의 루프에 필요한 상태들을 어떻게 추
정하는지 보여준다.
물리적 시스템, 저래밸의 오토파일럿, 상태 추정 루틴 등을 나타내는 수학적 방정식은 이러한 전체를 고려하면 매우 복잡하
고, 고래밸의 가이던스 루틴 설계에 적합하지는 않다.
1.2 모델 설계
12.
그러므로 9장에서대기 속도, 고도, 방위각 등을 입력으로 하고, 기체의 관성계 위치와 자세를 출력으로 하며, 이 시스템의
동작을 폐회로로 나타내는 비선형 설계 모델을 개발한다. 9장에서 개발한 설계 모델을 10장에서 13장까지 항행 알고리즘
개발에 사용한다.
그림 1.3에서 설계 모델(design model)은 제어 시스템과 항행 설계에 사용되며, 테스트 시 시스템의 필수적인 특성을 확보
하지 못했다면 개선이 필요하다. 이후 물리적 시스템에서 구현되어 다시 시험하고 디버깅 과정을 거친다.
1.2 모델 설계
13.
이 책에서는기존의 수작업으로 하던것 대신 설계 프로젝트로 대신하였다. 이 설계 프로젝트는 이 책들의 합쳐서 진행되며,
독자가 개념들을 이해하는데 도움이 될것이다. MAV 비행 시뮬레이터 구현을 다룰 것이며 Matlab/Simulink를 사용할 것이
고, 다른 추가 패키지는 필요하지 않다. 이 책에서 제공하는 웹 사이트에서 비행 시뮬레이터에 도움될만한 매트랩 시뮬링크
파일을 제공하고 있으며, 우리는 기본 틀 파일을 제공하고 내부적인 동작은 독자가 직접 작성해야 한다. 이 프로젝트는 각
챕터들을 완성해야 하며 각 챕터가 동작하는지 확인해주기 위해 웹 사이트에 그래프와 사진들을 올려놓았다.
2장에서는 기체 애니메이션을 개발하며, 강체의 회전을 다룬다. 메트랩에서 애니메이션 그래픽 튜토리얼에 대해 부록 C에
서 제공하고 있다. 3장에서는 강체의 운동 방정식 수학적 모델링을 사용하여 에니메이션을 움직이고, 4장에서는 고정익 기
체에 대한 힘과 모멘트를 시뮬레이션에 추가할 것이다. 5장에서는 시뮬링크 명령어 trim과 linmod를 사용하여 기체 트림
컨디션을 찾기 위해 찾아 낼 것이고, 6장에서는 기체 제어에 실제 상태를 사용하여 오토파일럿 블록을 구현할 것이다. 7장
에서는 센서 모델을 구현하고 8장에서는 오토 파일럿에 필요한 센서들의 상태 추정 방법들을 구한다.
1.3 설계 프로젝트
14.
8장에서는 사용가능한 센서 정보를 이용해서 대기속도와 고도 방위각을 제어하는 폐루프 시스템을 설계하고, 9장에서는
단순한 설계 모델을 사용하여 폐루프 동작을 근사하고, 정밀한 폐루프 시뮬레이션을 만들기 위해 설계 모델의 파라미터를
조정할 것이다. 10장에서는 바람이 있는 상태에서도 직선과 원형 궤적을 따라가는 단순한 항행 알고리즘을 개발하고, 11장
에서 듀빈스 경로와 같이 직선과 원형으로 이루어진 복잡한 궤적을 만들 것이다. 12장에서는 RRT 경로 계획을 구현하여 장
애물이 있는 환경에서 듀빈스 경로를 만들어 낼 것이다. 13장은 지상에서 움직이는 타겟을 가리키고, 카메라 정보를 이용하
여 목표물의 위치를 추정해 나갈 것이다.
1.3 설계 프로젝트






















![[Shader study]Shadow Map Silhouette Revectorization(2014.01.06)](https://cdn.slidesharecdn.com/ss_thumbnails/shaderstudyshadowmapsilhouetterevectorizationsmsr-140112193416-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)










![제 19회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [전진 4드론] : RAD(Reinforcement learning method for ...](https://cdn.slidesharecdn.com/ss_thumbnails/4-240209030650-b7b5323b-thumbnail.jpg?width=640&height=640&fit=bounds)





![[울산]유시스 기업 홍보문서](https://cdn.slidesharecdn.com/ss_thumbnails/random-151109092035-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)










![[컴퓨터비전과 인공지능] 8. 합성곱 신경망 아키텍처 3 - GoogLeNet](https://cdn.slidesharecdn.com/ss_thumbnails/lec8convolutionnetworksarcitecture3googlenet-210214112100-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 5. 신경망](https://cdn.slidesharecdn.com/ss_thumbnails/lec5neuralnetwork-210125014802-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 6. 역전파 2](https://cdn.slidesharecdn.com/ss_thumbnails/lec6backpropagation2-210203225156-thumbnail.jpg?width=640&height=640&fit=bounds)

![[컴퓨터비전과 인공지능] 7. 합성곱 신경망 2](https://cdn.slidesharecdn.com/ss_thumbnails/lec7convolutionnetworks2-210213150820-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 8. 합성곱 신경망 아키텍처 1 - 알렉스넷](https://cdn.slidesharecdn.com/ss_thumbnails/lec8convolutionnetworksarcitecture1alexnet-210213163008-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 7. 합성곱 신경망 1](https://cdn.slidesharecdn.com/ss_thumbnails/lec7convolutionnetwork-210207104334-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 10. 신경망 학습하기 파트 1 - 2. 데이터 전처리](https://cdn.slidesharecdn.com/ss_thumbnails/lec10trainingneuralnetworkspart12datapreprocessing-210223065837-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 8. 합성곱 신경망 아키텍처 2 - ZFNet, VGG-16](https://cdn.slidesharecdn.com/ss_thumbnails/lec8convolutionnetworksarcitecture2zfnetvgg16-210213163140-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 8. 합성곱 신경망 아키텍처 4 - ResNet](https://cdn.slidesharecdn.com/ss_thumbnails/lec8convolutionnetworksarcitecture4resnet-210214112234-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 10. 신경망 학습하기 파트 1 - 1. 활성화 함수](https://cdn.slidesharecdn.com/ss_thumbnails/lec10trainingneuralnetworks1activationfunction-210221112518-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 6. 역전파 1](https://cdn.slidesharecdn.com/ss_thumbnails/lec6backpropagation-210201173541-thumbnail.jpg?width=640&height=640&fit=bounds)

![[컴퓨터비전과 인공지능] 4. 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/lec4202101181335optimization-210119155221-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 3. 선형 분류 : 선형 분류기 일부](https://cdn.slidesharecdn.com/ss_thumbnails/202101111400linearclassifier-210111060058-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 8. 합성곱 신경망 아키텍처 5 - Others](https://cdn.slidesharecdn.com/ss_thumbnails/lec8convolutionnetworksarcitecture5others-210215060452-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 5. 신경망 2 - 신경망 근사화와 컨벡스 함수](https://cdn.slidesharecdn.com/ss_thumbnails/neuralnetwork2-210128174417-thumbnail.jpg?width=640&height=640&fit=bounds)
![[리트코드 문제 풀기] 연결 리스트](https://cdn.slidesharecdn.com/ss_thumbnails/127coma-210127082946-thumbnail.jpg?width=640&height=640&fit=bounds)
![[리트코드 문제 풀기] 배열](https://cdn.slidesharecdn.com/ss_thumbnails/leetcode-210119155410-thumbnail.jpg?width=640&height=640&fit=bounds)
![[컴퓨터비전과 인공지능] 3. 선형 분류기 : 손실 함수와 규제](https://cdn.slidesharecdn.com/ss_thumbnails/202101112200linearclassifier2-210111130805-thumbnail.jpg?width=640&height=640&fit=bounds)