Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hajime Mihara
PPTX, PDF
1,631 views
0611_light field_cam_for_upload
第34回CV勉強会「コンピュテーショナルフォトグラフィ」発表資料
Technology
◦
Read more
6
Save
Share
Embed
Embed presentation
Download
Downloaded 15 times
1
/ 43
2
/ 43
3
/ 43
4
/ 43
5
/ 43
6
/ 43
7
/ 43
8
/ 43
9
/ 43
10
/ 43
11
/ 43
12
/ 43
13
/ 43
14
/ 43
15
/ 43
16
/ 43
17
/ 43
18
/ 43
19
/ 43
20
/ 43
21
/ 43
22
/ 43
23
/ 43
24
/ 43
25
/ 43
26
/ 43
27
/ 43
28
/ 43
29
/ 43
30
/ 43
31
/ 43
32
/ 43
33
/ 43
34
/ 43
35
/ 43
36
/ 43
37
/ 43
38
/ 43
39
/ 43
40
/ 43
41
/ 43
42
/ 43
43
/ 43
More Related Content
PPTX
20160612 第34回cv勉強会@関東 コンピュテーショナルフォトグラフィ
by
Kyohei Unno
PPTX
20160724_cv_sfm_revisited
by
Kyohei Unno
PPTX
0727 cvpr16 asp_vision_upload
by
Hajime Mihara
PPTX
mihara_iccp16_presentation
by
Hajime Mihara
PDF
コンピュテーショナルフォトグラフティの基礎
by
Norishige Fukushima
PPTX
Cvim saisentan-4-2-tomoaki
by
tomoaki0705
PDF
第34回CV勉強会「コンピュテーショナルフォトグラフィ」発表資料
by
Takuya Minagawa
PDF
生成モデルの Deep Learning
by
Seiya Tokui
20160612 第34回cv勉強会@関東 コンピュテーショナルフォトグラフィ
by
Kyohei Unno
20160724_cv_sfm_revisited
by
Kyohei Unno
0727 cvpr16 asp_vision_upload
by
Hajime Mihara
mihara_iccp16_presentation
by
Hajime Mihara
コンピュテーショナルフォトグラフティの基礎
by
Norishige Fukushima
Cvim saisentan-4-2-tomoaki
by
tomoaki0705
第34回CV勉強会「コンピュテーショナルフォトグラフィ」発表資料
by
Takuya Minagawa
生成モデルの Deep Learning
by
Seiya Tokui
Similar to 0611_light field_cam_for_upload
PPTX
20160612 関東cv勉強会 sumisumithパート
by
sumisumith
PPTX
Computer Vision Chapter 4 Section 4
by
Kei Kawamura
PPTX
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜
by
SSII
PDF
CVPR2019読み会 "A Theory of Fermat Paths for Non-Line-of-Sight Shape Reconstruc...
by
Hajime Mihara
PPTX
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
PDF
20160525はじめてのコンピュータビジョン
by
Takuya Minagawa
20160612 関東cv勉強会 sumisumithパート
by
sumisumith
Computer Vision Chapter 4 Section 4
by
Kei Kawamura
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜
by
SSII
CVPR2019読み会 "A Theory of Fermat Paths for Non-Line-of-Sight Shape Reconstruc...
by
Hajime Mihara
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
20160525はじめてのコンピュータビジョン
by
Takuya Minagawa
Recently uploaded
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PPTX
ddevについて .
by
iPride Co., Ltd.
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Drupal Recipes 解説 .
by
iPride Co., Ltd.
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
ddevについて .
by
iPride Co., Ltd.
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Drupal Recipes 解説 .
by
iPride Co., Ltd.
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
0611_light field_cam_for_upload
1.
コンピュテーショナルフォトグラフィ 理解のための光学系入門 ~ 4章 ~ #cvsaisentan @mhr380
2.
自己紹介 • 1991/11 :北海道生まれ •
~2014/03 :某高専@北海道 • ~2016/03 :某大学院大学の修士課程@奈良 • 2016/04~ :某企業のCV系R&D見習い@東京 三原 基 (@mhr380) ※本発表は現在の所属組織とは一切関係ありません
3.
おしながき • 4章:応用例 • 4.1:
カメラアレイによるライトフィールドの獲得 • 4.2: カメラ内部の工夫によるライトフィールドの獲得 • 4.3: 合成開口法によるリフォーカス 日浦慎作, コンピュータビジョン最先端ガイド4, 第2章 コンピュテーショナルフォトグラフィ理解のための光学系入門
4.
ライトフィールド #とは シーン中を飛び交う光線の集合
5.
「普通の」カメラでシーンを撮影 u v x y Main Lens Scene Sensor 様々な角度からセンサに入射する光線を 角度方向に積分 4D
から 2Dへ
6.
どのように4Dのまま光線を獲得する? Scene 何らかの 装置
7.
おしながき • 4章:応用例 • 4.1:
カメラアレイによるライトフィールドの獲得 • 4.2: カメラ内部の工夫によるライトフィールドの獲得 • 4.3: 合成開口法によるリフォーカス 日浦慎作, コンピュータビジョン最先端ガイド4, 第2章 コンピュテーショナルフォトグラフィ理解のための光学系入門
8.
どのように4Dのまま光線を獲得する? Scene https://openclipart.org/detail/168562/camera-no-filters • たくさんカメラを並べる (注)図は正確ではありません
9.
カメラアレイによる ライトフィールドの獲得 • 大変由緒正しき手法 http://graphics.stanford.edu/projects/array/ The Stanford
Multi-Camera Array ViewPLUS ProFUSION25 http://www.viewplus.co.jp/product_old.html
10.
カメラアレイによる ライトフィールドの獲得 u x pp. 39, 図2.14
11.
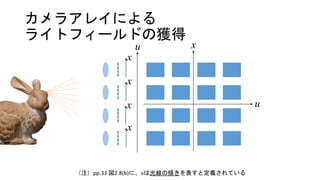
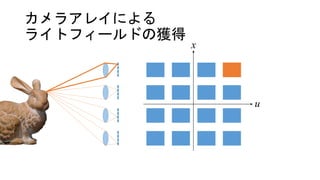
カメラアレイによる ライトフィールドの獲得 x x x x u (注)pp.33 図2.8(b)に、uは光線の傾きを表すと定義されている u x
12.
カメラアレイによる ライトフィールドの獲得 u x
13.
カメラアレイによる ライトフィールドの獲得 u x
14.
カメラアレイによる ライトフィールドの獲得 u x
15.
カメラアレイによる ライトフィールドの獲得 u x
16.
u v
17.
カメラアレイのメリット 分解能が良好 • カメラ1台あたりの画素数 =
空間サンプル数 • カメラの台数 = 角度サンプル数 大開口の実現 • 通常のカメラでは不可能な、巨大なボケを作り出すことが可能 • 合成開口(4.3章:後述)
18.
カメラアレイのデメリット カメラすべての同期が必要 • つらそう 角度方向に密なサンプリングが難しい • カメラ1台1台がある程度の大きさを持つため 装置が大型化
19.
おしながき • 4章:応用例 • 4.1:
カメラアレイによるライトフィールドの獲得 • 4.2: カメラ内部の工夫によるライトフィールドの獲得 • 4.3: 合成開口法によるリフォーカス 日浦慎作, コンピュータビジョン最先端ガイド4, 第2章 コンピュテーショナルフォトグラフィ理解のための光学系入門
20.
どのように4Dのまま光線を獲得する? Scene 何らかの 装置
21.
どのように4Dのまま光線を獲得する? u v Main Lens x y Scene Sensor レンズアレイを用いることで 1つのセンサでライトフィールドを獲得
22.
レンズアレイによる ライトフィールドの獲得 • Plenoptic Camera
[Adelson+, TPAMI ’92] • レンズアレイ式の元祖 • ステレオ視による物体形状取得が目的
23.
レンズアレイによる ライトフィールドの獲得 • Hand-held Plenoptic
Camera [Ng+, ’05] • [Adelson+, ’92]を手持ちできるよう改良 • 主にリフォーカスをアプリケーションとして据えている(後述) http://graphics.stanford.edu/projects/lightfield/ren-ng.jpg
24.
• Lytro • Ren
Ngが立ち上げたスタートアップ • 1st gen. (左)は’12年発売、2nd gen.(右)は’14年発売 レンズアレイによる ライトフィールドの獲得 https://lytro.com/
25.
• Ren NgはLytroへのフルタイムなコミットをやめ、 UC
Berkeleyでfacultyになった(’15~) • 国際会議へ発表に行ったら 座長が彼だった 余談
26.
レンズアレイによる ライトフィールドの獲得 Image sensor Lens array Main
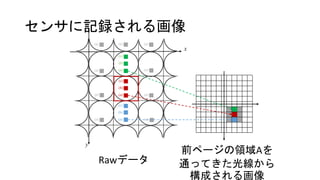
lensObject Sub aperture A B C (c) (b) (a) (c) (b) (a) (c) (b) (a) • レンズアレイを通って、下部(a)に記録される光線は、 メインレンズ中のA領域を通る • 同様に、(b)に記録される光線は、メインレンズのB領域を通る
27.
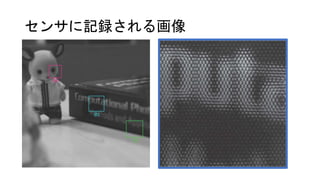
センサに記録される画像
28.
センサに記録される画像 x y (c) (b) (a) (c) (b) (a) (c) (b) (a) (a) (a) (a)(a) (a) (a) (a) (a) (a) Rawデータ 前ページの領域Aを 通ってきた光線から 構成される画像
29.
レンズアレイ方式のメリット 小型化が可能 角度方向に密なサンプリングが可能
30.
レンズアレイ方式のデメリット 空間解像度が低下 1枚のセンサで光線の位置と傾きを計測 3000x4000画素のセンサを用いても、リフォーカス画像自体はVGAサイ ズまで低下 キャリブレーションがつらい Lytroは工場で1台ごとにキャリブレーションしているという噂
31.
おしながき • 4章:応用例 • 4.1:
カメラアレイによるライトフィールドの獲得 • 4.2: カメラ内部の工夫によるライトフィールドの獲得 • 4.3: 合成開口法によるリフォーカス 日浦慎作, コンピュータビジョン最先端ガイド4, 第2章 コンピュテーショナルフォトグラフィ理解のための光学系入門
32.
ライトフィールドを取得して 何が嬉しいのか? • 多眼ステレオによる形状取得 • 未だにトップカンファレンスに毎回数本ずつくらい採択 •
自由視点画像生成、Image based rendering • (最近は)HMD用コンテンツ作成 • リフォーカス [Wanner+, CVPR ‘13]
33.
• [Ng+, ’05] Hand-held
Plenoptic Camera http://graphics.stanford.edu/projects/lightfield/ren-ng.jpg
34.
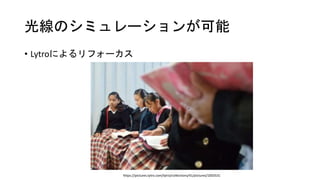
光線のシミュレーションが可能 • Lytroによるリフォーカス https://pictures.lytro.com/lytro/collections/41/pictures/1003531
35.
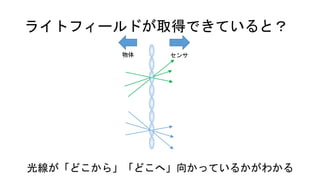
ライトフィールドが取得できていると? 物体 センサ 光線が「どこから」「どこへ」向かっているかがわかる
36.
ライトフィールドが取得できていると? 物体 センサ 光線が「どこから」「どこへ」向かっているかがわかる
37.
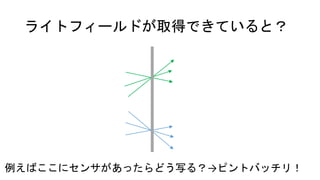
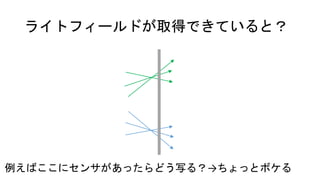
ライトフィールドが取得できていると? 例えばここにセンサがあったらどう写る?→ピントバッチリ!
38.
ライトフィールドが取得できていると? 例えばここにセンサがあったらどう写る?→ちょっとボケる
39.
ライトフィールドが取得できていると? 例えばここにセンサがあったらどう写る?→とてもボケる
40.
実装 • 取得した多眼画像をずらして重ねあわせるだけ A B Scene u 0 1 2 Bu d1[px] d2[px]
41.
カメラアレイによる合成開口 [Vaish et al.,
CVPR ‘04] [Yang et al., ECCV ‘14]
42.
ライトフィールドを用いない リフォーカス • 未較正合成開口法[Kusumoto, Hiura,
Sato, CVPR ‘09] • 少ない入力から、補完によってライトフィールドを復元 入力 出力(前面にフォーカス)
43.
まとめ • ライトフィールドの獲得方法 • カメラアレイ •
レンズアレイ • 応用 • 今回はリフォーカスについて説明
Editor's Notes
#5
光線空間というのは,図に示すように,シーン中をあらゆる方向に飛び交う,光線の集合のことを あらわします.
#6
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
#7
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
#9
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
#10
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
#21
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
#22
では,なぜ光線空間カメラでは光線の情報をまるごと記録できるか,について先に簡単に説明します. 光線の向きは,u-v平面およびx-y平面それぞれどこを通過したか,xyuvの4つのパラメータで定義されます. 従来のカメラでは,レンズの様々な方向から入射した光線は,イメージセンサ上の一点に集まり,その強度のみがピクセルとして出力されます. すなわち,光線をu-v方向について積分したもののみが出力されるため,その値からは角度情報得ることはできません. この縮退情報が,いわゆる2次元の画像です. 一方光線空間カメラは,イメージセンサの前方にレンズアレイを設置することで,様々なところから入射した光線を,センサ上の別々の箇所に記録します. この工夫により,光線の方向情報を保ったまま,記録することができます. なお、この光線空間は、u-v平面上の様々な点から撮影した画像の集まりと等価になるため、 得られた光線空間はu-v平面上に2次元画像が並んでいるものと表すことができます. 本発表では,光線空間はこのような4次元配列形式で表すものとします.
Download




















![レンズアレイによる
ライトフィールドの獲得
• Plenoptic Camera [Adelson+, TPAMI ’92]
• レンズアレイ式の元祖
• ステレオ視による物体形状取得が目的](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-22-320.jpg)
![レンズアレイによる
ライトフィールドの獲得
• Hand-held Plenoptic Camera [Ng+, ’05]
• [Adelson+, ’92]を手持ちできるよう改良
• 主にリフォーカスをアプリケーションとして据えている(後述)
http://graphics.stanford.edu/projects/lightfield/ren-ng.jpg](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-23-320.jpg)





![ライトフィールドを取得して
何が嬉しいのか?
• 多眼ステレオによる形状取得
• 未だにトップカンファレンスに毎回数本ずつくらい採択
• 自由視点画像生成、Image based rendering
• (最近は)HMD用コンテンツ作成
• リフォーカス
[Wanner+, CVPR ‘13]](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-32-320.jpg)
![• [Ng+, ’05]
Hand-held Plenoptic Camera
http://graphics.stanford.edu/projects/lightfield/ren-ng.jpg](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-33-320.jpg)


![実装
• 取得した多眼画像をずらして重ねあわせるだけ
A
B
Scene
u
0
1
2
Bu
d1[px]
d2[px]](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-40-320.jpg)
![カメラアレイによる合成開口
[Vaish et al., CVPR ‘04]
[Yang et al., ECCV ‘14]](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-41-320.jpg)
![ライトフィールドを用いない
リフォーカス
• 未較正合成開口法[Kusumoto, Hiura, Sato, CVPR ‘09]
• 少ない入力から、補完によってライトフィールドを復元
入力 出力(前面にフォーカス)](https://image.slidesharecdn.com/0611lightfieldcamforupload-160612012203/85/0611_light-field_cam_for_upload-42-320.jpg)























