Download as PDF, PPTX
![AlgorithmGeadyKnapsack(m,n)
/*p[1:n]andw[1:n]containtheprofitandweightsrespectivelyofthenobjectsorderedsuchthatp[i]/w[i]>=p[i+1]/w[i+1].Mistheknapsacksizeandx[1:n]isthesolutionvector.*/
{
fori:=1tondox[i]:=0.0;//Initialize
U:=m;
fori:=1tondo
{
if(w[i]>U)thenbreak;
x[i]:=1.0;U:=U–w[i];
}
if(i<=n)thenx[i]:=U/w[i];
}](https://image.slidesharecdn.com/05-141031094015-conversion-gate01/85/05-greedy-method-6-320.jpg)
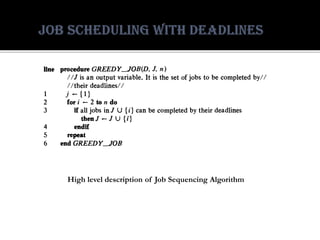
![AlgorithmJS(d,j,n)
/*d[i]>=1,1<=i<=narethedeadlines,n>=1.Thejobsareorderedsuchthatp[1]>=p[2]>=….>=p[n].J[i]istheithjobintheoptimalsolution,1<=i<=k.Alsoatterminationd[J[i]]<=d[J[i+1]],1<=i<k*/
{
d[0]:=J[0]:=0;//Initialize.
J[1]:=1;//IncludeJob1.
k:=1;
fori:=2tondo
{
//Considerjobsinnon-increasingorderofp[i].Findposition
//ofIandcheckfeasibilityofinsertion.
r:=k;
while((d[J[r]]>d[i])and(d[J[r]]!=r))dor:=r-1;
if((d[J[r]<=d[i])and(d[i]>r))then
{
//InsertIintoJ[]
forq:=kto(r+1)step-1doJ[q+1]:=J[q];
J[r+1]:=i;k:=k+1;
}
}
returnk;
}](https://image.slidesharecdn.com/05-141031094015-conversion-gate01/85/05-greedy-method-8-320.jpg)
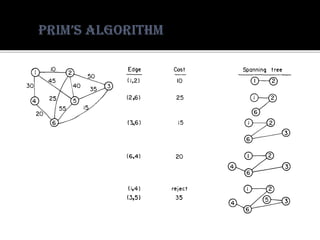
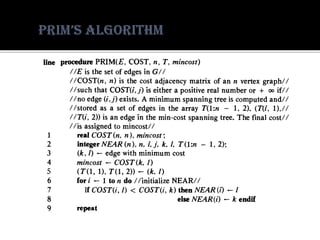
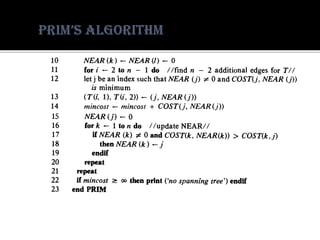




The document discusses greedy algorithms for solving optimization problems. It provides examples of using a greedy algorithm to solve the knapsack problem and the job sequencing problem. It also briefly mentions Prim's and Kruskal's algorithms for finding minimum spanning trees in graphs.