
Recommended
More Related Content
Similar to USA Report Houston
Similar to USA Report Houston (20)
Recently uploaded
Recently uploaded (20)
USA Report Houston
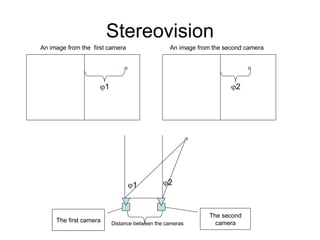
- 1. Stereovision 1 2 An image from the first camera An image from the second camera Distance between the cameras The first camera The second camera 1 2
- 2. Suggested Method: Source images An image from the first camera An image from the second camera An image from the third camera
- 3. Suggested Method: processing images with an edge detector (SOBEL) The image from the first camera The image from the second camera The image from the third camera
- 4. Suggested Method: Image comparison An image from the first camera An image from the second camera An image from the third camera
- 5. Suggested Method The Source Image The Result as a 3D Scene
- 6. Suggested Method The Sourced Image The Result as a 3D Scene
- 7. Suggested Method The Sourced Image The Result as a 3D Scene
- 8. Solving the Problem of the objects’ orientation with the suggested method The difference of the object’s orientation is 70 degrees The Original Images
- 9. Solving the Problem of the objects’ orientation with the suggested method The Original Images processed with an edge detector The difference of the object’s orientation is 70 degrees
- 10. Solving the Problem of the objects’ orientation with the suggested method The Reconstructed Scenes The First Scene (reconstructed) The Second Scene (reconstructed)
- 11. Solving the Problem of the objects’ orientation with the suggested method The object from the first scene The object from the second scene
- 12. Solving the Problem of the objects’ orientation with the suggested method The object from the first scene The object from the second scene
- 13. Recognition Comparator 3D scene Target object from a Data Base The Object’s Position and Orientation in the Scene
- 14. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
- 15. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
- 16. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
- 17. Recognition The Original Images The Reconstructed scene Using a virtual object as a target object A virtual target object
- 18. Recognition Virtual Target Object Scene The Object in the Scene Using a virtual object as a target object
- 19. The Original Images Recognition Using a real object as a target object
- 20. The Original Images processed with an Edge Detector Recognition Using a real object as a target object
- 21. Solving the Problem of Objects’ orientation with suggested method
- 22. The Example Of Using The Suggested Method: The Identification Of People Receiving the 3d mask from the real image of a human begin Original Image with the projections of the reconstructed points 3D mask of the real image
- 23. The Example Of Using The Suggested Method: The Identification Of People Receiving the 3d mask from the real image of a human begin Original Image with the projections of the reconstructed points 3D mask of the real image