1. Autonomous Navigation Robot
WAI HONG KEET(D00152877)
References
B. Eng. (Hons.) in Sustainable Design Engineering
Department of Electronic and Mechanical Engineering
Introduction
Autonomous Navigation robots are used in
multiple sectors for assisting people and to improve
efficiency in completing tasks. There are
many methods for a robot to navigate around
obstacles, however the complexity of utilising
machine vision and sensors is a major challenge
in achieving autonomous navigation.
Project Brief
The aim of this project is to investigate multiple
navigation methods and to design an autonomous
robot which operates in an indoor environment.
Figure 1 shows the initial design for the robot.
The robot should be able to perform the tasks
listed below:
• Ability to navigate a specific room.
• Recognize predefined verbal commands.
• Obstacle avoidance.
Figure 1: Autonomous Robot Block Diagram
Concept & Design
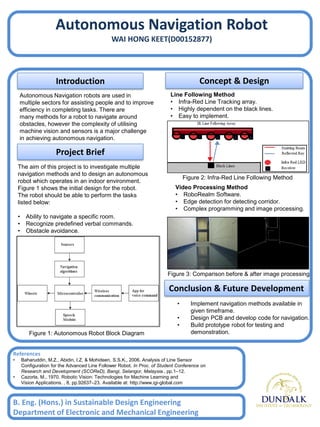
Line Following Method
• Infra-Red Line Tracking array.
• Highly dependent on the black lines.
• Easy to implement.
Figure 3: Comparison before & after image processing
Conclusion & Future Development
Figure 2: Infra-Red Line Following Method
Video Processing Method
• RoboRealm Software.
• Edge detection for detecting corridor.
• Complex programming and image processing.
• Implement navigation methods available in
given timeframe.
• Design PCB and develop code for navigation.
• Build prototype robot for testing and
demonstration.
• Baharuddin, M.Z., Abidin, I.Z. & Mohideen, S.S.K., 2006. Analysis of Line Sensor
Configuration for the Advanced Line Follower Robot. In Proc. of Student Conference on
Research and Development (SCOReD), Bangi, Selangor, Malaysia., pp.1–12.
• Cazorla, M., 1970. Robotic Vision: Technologies for Machine Learning and
Vision Applications. , 8, pp.92637–23. Available at: http://www.igi-global.com