
Recommended
More Related Content
Similar to Swrs 2019
Similar to Swrs 2019 (20)
More from Simone Toma
More from Simone Toma (6)
Recently uploaded
Recently uploaded (20)
Swrs 2019
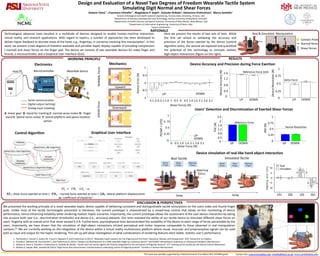
- 1. Contact Info: simone.toma@asu.edu, chinello@btech.au.dk, marco.santello@asu.edu 1. Pachierotti C, Sincalir S, Solazzi M, Frisoli A, Hayward V, and Prattichizzo D (2017) “Wearable haptic systems for the fingertip and the hand: Taxonomy, Review, and Perspectives” IEEE Transaction on Haptics. 2. Chinello F, Malvezzi M, Pacchierotti C, and Prattichizzo D (2015) “Design and development of a 3RRS wearable fingertip cutaneous device” IEEE/ASME International Conference on Advanced Intelligent Mechatronics 3. Shibata D, Toma S, Chinello F, Prattichizzo D, Santello M (2018). “Tactile and non-tactile signals are linearly integrated for the estimation of fingertip distance” 27th meeting of the Society for the Neural Control Movement 4. Shibata D, Kapper AML, Santello M (2014) “Digit forces bias sensorimotor transformations underlying control of fingertip position” Frontiers in Human Neuroscience Design and Evaluation of a Novel Two Degrees of Freedom Wearable Tactile System Simulating Digit Normal and Shear Forces Simone Toma1*, Francesco Chinello2*, Magdalena P. Gajek1, Daisuke Shibata4, Domenico Praticchizzo5, Marco Santello1 1School of Biological and Health Systems Engineering, Arizona State University, Arizona, USA 2Department of Business Development and Technology, Aarhus University, Midtjylland, Denmark 4 Department of Health Exercise and Sports Sciences, University of New Mexico, New Mexico, USA 5 Department of Information Engineering, University of Siena, Italy *equal contribution We presented the working principle of a novel wearable haptic device capable of delivering consistent and distinguishable tactile stimulations on the users index and thumb finger pads. Unlike most of the tactile technologies presented in literature, the current prototype is characterized by a closed-loop control that allows on-line monitoring of device performance, hence enhancing reliability while rendering realistic haptic scenarios. Importantly, the current prototype allows the assessment of the user-device interaction by taking into account both user (i.e., discrimination thresholds) and device (i.e., accuracy) datasets. Our tests revealed the ability of our tactile device to stimulate different shear forces on users’ fingertip with an overall error that never exceed 0.3 N. Furthermore, psychophysical tests demonstrated the suitability of the device to exert range of forces perceivable by the users. Importantly, we have shown that the simulation of digit-object interactions elicited perceptual and motor response comparable to those observed in real manipulation contexts.3,4 We are currently working on the integration of the device within a virtual reality multisensory platform where visual, muscular and proprioceptive signals can be used both as input and output for the haptic rendering. This set-up will allow investigation of what combinations of rendering features elicit stable, realistic user’s performance. Technological advances have resulted in a multitude of devices designed to enable human-machine interaction, virtual reality, and research applications. With regard to haptics, a number of approaches has been developed to deliver haptic feedback to discrete areas of the hand, e.g., fingertips, in scenarios involving fine manipulation1. In this work, we present a two-degrees-of-freedom wearable and portable haptic display capable of providing compression ( normal) and shear forces on the finger pad. The device set consists of two wearable devices for index finger and thumb, a microcontroller, and a Graphical User Interface (GUI). RATIONALE This work was partially supported by a National Science Foundation BCS-1455866 grant. Real & Simulated Manipulation Normal force Shear forces Contact Point Here we present the results of two sets of tests. While the first set aimed at validating the accuracy and precision of the forces exerted by the device (control algorithm tests), the second set explored and quantified the potential of this technology to simulate realistic digit-object interactions (figure on the right). Mechanics Device Accuracy and Precision during Force Exertion DISCUSSION & PERSPECTIVES RESULTSWORKING PRINCIPLE Device simulation of real-like hand object interaction Simulated Tactile time time Real Tactile Matching error UU DD UD DU A B C D E F A: linear gear B: stand for tracking C: normal servo motor D: finger stand E: lateral servo motor F: lateral platform and piezo-resistive sensor Serial communication Digital output (writing) Analog input (reading) NORMALForce Upward Downward SHEARForce Electronics Graphical User InterfaceControl Algorithm DeviceAccuracy(N) UP DOWN 0 0.4 0.8 1.2 1.6 UP DOWN DeviceResolution(N) 0 0.25 0.5 0.75 1 UP DOWN PSE(N) 0.5 2.4 0 1.6 Reference Force 1.2 0.8 2 JND(N) UP DOWN 0.25 0.75 1 0 0.5 Device Resolution Users’ Detection and Discrimination of Exerted Shear Forces P(CMP>STD) 0.25 0.5 0. 75 1 0 0 0.5 1.61.0 2.1 2.6 3.1 Shear Force (N) UP DOWN -1.6 -0.5 0 0.5 1.61.0 2.1 2.6 3.1-3.1-2.6-2.1 -1 Shear Forces (N) DOWNUP DeviceError(N) 1 -0.5 0.5 -1 0 Reference Force (std) Delta Force 𝑆𝐹𝑡 = 𝐹𝑁𝑡 ∙ 𝐿𝐷𝑡 ∙ 𝜔 𝑺𝑭 𝒕: shear force exerted at time t 𝑭𝑵 𝒕 : normal force exerted at time t 𝑳𝑫 𝒕: lateral platform displacement 𝝎: coefficient of elasticity2 Host PC MicroController Wearable device