Virtual Prototype with Rigid and Flexi-body Concept to Develpoment of Multifu...
109137944 - Poster
1. Design, Analysis and Development of an
Autonomous Indoor Stair Climbing Service Robot
Summary and Conclusions
Since the design of the robot was effectively developed and all
the analyses, once implemented on the actual prototype,
showed expected and accurate results, the primary aims and
objectives of this research has been successfully accomplished.
Introduction
Robots have always been ambitiously known to ultimately
replace human workers. This initiative began due to the
supposition that robots (in future) would be self-governing
machines able to reprogram themselves in order to tackle a
range of unfamiliar tasks. However, even at this present stage of
advanced technological development, robots are being used
merely to assist humans in performing specific tasks that are
either too hazardous to humans or extremely time-consuming.
Methodology
A serving tray with one degree of freedom is designed and
implemented to deliver items while keeping them horizontal
throughout, controlled dynamically using an accelerometer.
Inverse Kinematic analyses are performed in order to detect
and measure stair height and to derive and apply the desired
joint angles to place its leg on the stair autonomously.
Trajectory planning equations are derived and implemented,
to move legs (through two ‘via points’) in a cubic polynomial
trajectory, which are continually manipulated in real time.
Results and Discussions
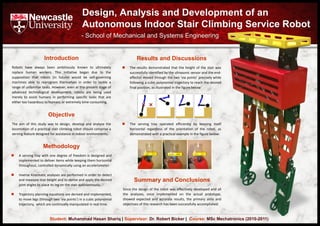
The results demonstrated that the height of the stair was
successfully identified by the ultrasonic sensor and the end-
effector moved through the two ‘via points’ precisely while
following a cubic polynomial trajectory to reach the desired
final position, as illustrated in the figure below:
The serving tray operated efficiently by keeping itself
horizontal regardless of the orientation of the robot, as
demonstrated with a practical example in the figure below:
Student: Muhammad Hasan Shariq | Supervisor: Dr. Robert Bicker | Course: MSc Mechatronics (2010-2011)
Objective
The aim of this study was to design, develop and analyse the
locomotion of a practical stair climbing robot should comprise a
serving feature designed for assistance in indoor environments.
- School of Mechanical and Systems Engineering