1. Millions of people in the U.S. suffer from impaired hand
function due to a stroke which impacts the use of either
one or multiple fingers.
Standard devices to solve this issue, such as
exoskeletons, while being incredibly precise they are
known to introduce many issues, some of which include:
• Cost – These devices range in the thousands of dollars
and are not available to everybody who needs one.
• Weight – These devices are made of heavy metal
components that will affect the motion of users
• Comfort – Fitting rigid metal components will
produce compression forces against soft tissue
PROBLEM
SOLUTION
Sensor Manufacturing
METHODOLOGY IMPLICATIONS
The final purpose of this research involves using the data collected
from the sensor glove and applying it to a supernumerary device
similar to that shown below.
Supernumerary robotic (SR) devices are a class of wearable device
which adds extra limbs to the user to enhance manipulation
capabilities. In order to add this device to a person, we need to be
able to map the different forces and gestures that a person uses for
various grasping motions.
Embedding these sensors to the soft robotic phalanges would allow
us to introduce the same haptic feedback loop that was
implemented with the glove and a healthy hand.
Future steps involves fitting one of these devices in an individual
with an impaired hand and seeing how well the device can
compliment the patients limited range of motions.
REFERENCES
(1)Arduino.com, (2)Sparkfun.com
ACKNOWLEDGEMENT
I would like to thank Dr. Hammond for giving me the opportunity to work
in such exciting research as well as for his excellent guidance through out
this process.
To solve this problem a supernumerary robotic (SR)
device is proposed to add additional grasping capabilities.
This device is attached to the body and would act by
coordinating with the patient and complimenting their
motions through feedback from the human to the robot as
well as from the robot to the human.
This device will be a soft robotic one made of mostly
silicone, which would solve the problems stated above:
• Cost – Silicone sensor and devices can be made much
more readily and are molded easily thus reducing cost
of manufacturing.
• Weight – The silicone being used in these components
has a density that’s a fraction of that of its metallic
counterpart.
• Comfort – Silicone easily conforms to the body of the
wearer and safely provides the motive forces required
to actuate human joints.
The George W. Woodruff School of Mechanical Engineering
Fernando de Caralt
Soft Sensors for Coordination of Robot-Assisted Grasping
SensorResponse(V)
Applied Load (N)
0.5
0.42
0.46
0.38
0.3
0 0.2 0.4 0.6 0.8 1.0
0.34
Tensile Load at 29%
Strain
(0.637 N)
Tensile Strain Response
Off-Axis Compression
Predicted Response
SensorResponse(V)
0.8
0.1
0.4
0.6
0.5
0.7
Applied Pressure (kPa)
0.3
0.2
0.0
0 20 40 60 80 100 120
Loading
Unloading
Voltage at Sensor Bias Resistance
(1.86 Ohms)
Actual Response
Predicted Response
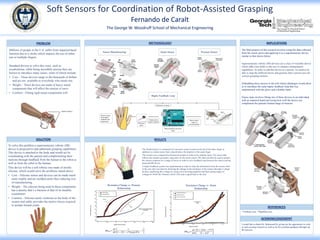
RESULTS
∆𝑅 𝑒𝑥𝑡=
𝜌𝐿
𝑤ℎ
1 + 2𝜈 𝜀 − 𝜈2 𝜀2
1 − 𝜈𝜀 2
Pressure SensorStrain Sensor
Resistance Change vs. Strain
Relationship
∆𝑅 𝑒𝑥𝑡=
𝜌𝐿
𝑤ℎ
1
1 − 2 1 − 𝜈2 𝑤𝜒 𝑝 𝐸 ℎ
− 1
Resistance Change vs. Pressure
Relationship
Vibratory
motor
Hand acts on sensor
Sensor relays
output to
microcontroller
Microcontroller processes
input
Output sent to
haptic feedback
Receive input
from haptic
feedback and
adapt grasp
Haptic Feedback Loop
The finalized glove is composed of a pressure sensor located on the tip of the index finger in
addition to a strain sensor that is placed above the knuckle of the same finger.
The sensors were compared to theoretical models in order to be calibrate them. The sensor data
follows the models accurately, especially for the strain sensor. This data can then be used to predict
the sensors response for a range of forces in order to set a feedback loop between the sensor and the
proposed SR device.
A haptic feedback system was implemented in order to relay the information from the sensors back
to the user, this was done by detecting the change in the resistance of the sensors through a voltage
divider, amplifying this voltage by using a non-inverting amplifier and then setting ranges of
voltages in which the vibratory motor will send a signal back to the user.
(1)
(2)
Impaired fingers
Editor's Notes
Problem:
Start by explaining the issue with people that have some sort of disability related to grasping motions that does not allow them to carry on with their lives in a normal manner and may really reduce their quality of life. Mention that current solutions are somewhat effective but they are expensive and bulky.
Add that some fingers don’t have functionality, only index and middle fingers do
Solution:
Solution should be the device that adds the additional grasp capability. Soft robotic devices are low cost. Supernumerary don’t require coupling to your body, they are just attached but can move independently. Aspect of the solution is to add coordination from human to robot and robot back to human in order to complete the loop
Here comes supernumerary soft robotic members that are used in addition to the patients available limbs. In order to achieve this we need to achieve this we need to be able to tract grasping motions and forces accurately so that the supernumerary limbs can complement the human ones without complicating their situation any further.
Methodology:
Explain slightly what these are made of and the process to fabricate the sensor. Potentially Mention some of the equations related to the resistance (or maybe in the results sections it’s more appropriate). inflatable finger that would hold some of the sensors and the position of the haptic feedback and how the loop would close. The sensors would receive data which would communicate with the human about the force of their grip, meanwhile the strain sensors are calculating the angle of the finger in order to transmit this information to the soft robotic attachment which would move accordingly to whatever the sensors ditactate in order to offer the perfect compliment of shape and form to the injured individual.
Results:
Show graphs of the theoretical and experimental correlations between the sensors and the given model (equation). Also show that the sensor has been wired through the arduino and calibrated so that certain output ranges have specific results. For example, when pressure is applied to the pressure sensor, the motor vibrates. And when the finger bends at specified angles, a different light turns on.
Implications:
The final goal of this motion mapping is that then it can be mirrored unto a supernumerary device or instead it could be used to track the motion of somebody with a disability and compare it with that of a healthy person, then have the supernumerary device apply forces in the support areas needed in order to stabilize the object being grasped.