1. TETRACOM: Technology Transfer in Computing Systems
FP7 Coordination and support action to fund 50 technology transfer projects (TTP) in computing systems.
This project has received funding from the European Union’s Seventh Framework Programme for research,
technological development and demonstration under grant agreement n⁰ 609491.
TETRACOM coordinator: Prof. Rainer Leupers, leupers@ice.rwth-aachen.de http://www.tetracom.eu | @TetracomProject
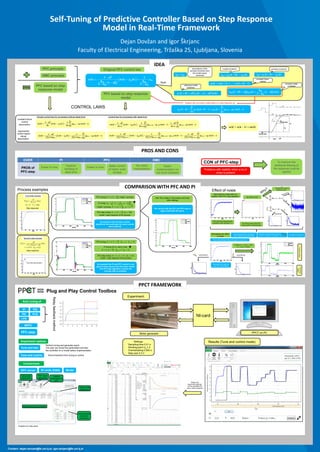
Self-Tuning of Predictive Controller Based on Step Response
Model in Real-Time Framework
Dejan Dovžan and Igor Škrjanc
Faculty of Electrical Engineering, Tržaška 25, Ljubljana, Slovenia
Contact: dejan.dovzan@fe.uni-lj.si; igor.skrjanc@fe.uni-lj.si
IDEA
PROS AND CONS
PPCT FRAMEWORK
COMPARISON WITH PFC AND PI
PFC principle
DMC principle
PFC based on step
response model
Original PFC control law
OVER PI PFC DMC
PROS of
PFC-step
Easier to tuneEasier to tune
Superior
handling of
dead-time
Better control
of higher order
models
No matrix
manipulations
Easier
implementation on
low level hardware
Problems with stability when a lot of
noise is present
CON of PFC-step To improve this
additional filtering of
the response must be
applied
=
−
−
−
− +
−
from
equivalence of the
process increment and
the model output
increment
process incrementmodel increment
process model
predictionreference model
prediction
∆ = ∆ ∆ = + −∆ = + −
( + ) = − −
+ = +
−
( − )
PFC based on step response
model
= + + ⋯ + + −
constant future
control
Replace with a process model based on a step response (g)
+ = ∆ ( + − ) + + ( − ) ∆ ( − )
∆ =
−
− − ( − )∆ ( − )
Simple control law for processes without dead-time
CONTROL LAWS
∆ =
−
∑
− −
∑
( − )∆ ( − ) ∆ =
−
∑
− −
∑
− ∆ − −
−
∑
− ∆ −
∆ =
−
− − − ∆ − −
−
− ∆ −
exponential
control signal
decay
assumption:
constant future
control
assumption:
Control law for processes with dead-time
= − + ∆
First order process
( ) =
+ 1
( )
= 5 = 100
Step response:
Second order process
( ) =
+ 2 +
( )
= 0.75 = 0.1
Step response:
Process examples
PFC tuning: = 5, = , model = process
PI tuning: K = , = , = ,
model = process, = 5, = , =
PFC-step tuning: = 5, = , N = 900
model = step response of the process
As expected with all three control
algorithms the practically the same results
were achieved
PFC tuning: = 4, = , = 1, = 15
PI tuning: for K and K look
= 4, = , = 1, = 15
PFC-step tuning: = 4, = 7.5, = 155
model = step response of the process
As expected the PI and PFC control is not
good as they assume the first order model.
The PFC-step algorithm controls the
process with no problem.
Add 100 s delay to the process and keep
other settings
The control with the PFC and PFC-step is
again practically the same.
Effect of nosie
First order aproximation
Bad signal to noise ratio is a
problem with PFC-step algorithm.
First order step response with
Gaussian noise (variance 0.1) The same tuning of the PFC-
step as with no noise present
Not stable control
−
−
The terms and
enhance noise
Should be
Decreasing the effect
of noise
Use control law with exponential
control signal decay assumption
Filter the output change and terms
( = 0.5 + 0.5 ( − 1))
Use higher values of H
Use oversampling to reduce the signal to noise ratio
Recorded step response
with 10x oversampling
using filtering using filtering
Tuning: = 10, = 900
= 10, = 0.999,
ProcessoutputController
output
Plug and Play Control Toolbox
Auto tuning of:
PIDPI
PD PI-D
I-PD
Relayfeedbackmethod
MPFC
PFC-step
Experiment options
Tune and test
Tune and control
Perform tuning and generate report.
The user can revise the parameters and test
the controller on a model before implementation
Direct transition from tuning to control
Connections
OPC server NI cards (DAQ) Model
Snapshot of main panel
Panel showing experiments
Panel showing
controller
parameters
Loading
parameters to
OPC
PDF report
generation
Setup new
experiment
NI-card
Experiment:
Motor generator PPCT on PC
Results (Tune and control mode):Settings:
- Sampling time 0.01 s
- Working point U0 = 2
- Oversampling 0.002 s
- Step size 0.3 V
Name of the
experiment
Singal and
experiment settings
can be expoRted for
use in other programs