1. Multi-temporal UAV Data for Crop Type Mapping
for Smallholder Farms in Tanzania
1. Introduction
Timely mapping and monitoring of crops like Maize, the
most important food security crop in Tanzania, can
provide an early warning for timely response by
government and non-government organizations to food
shortage or surplus conditions.
Small UAVs are useful for "monitoring sample-based
ground segments for:
Linking the Ground and Space-borne data
Using in lieu of satellite remote sensing data
Jyoteshwar R Nagol1*, Caspar Chung1, Jan Dempewolf1, Sixbert Maurice2, Winfred Mbungu2, and Siza Tumbo2
1University of Maryland 2 Sokoine University of Agriculture *jnagol@umd.edu
2. Study Area
The UAV data was collected at
two 1km2 plots each at, three
sites in Tanzania (Kilosa,
Same, and Njombe) and also
in Karamoja, Uganda. At these
sites both ground based and
UAV based data were collected
on a monthly time-step during
the year 2015 growing season.
Here we are presenting results
UAV Images
Geo-Tagging
Digital Surface Model
(Structure for Motion) (pix4D)
Geometric / Spectral
Calibration (pix4D)
Ortho-Mosaic (pix4D)
Additional Layers: Vegetation Index and Texture Layers
Maize Map
Multi-temporal Data Harmonization
from a 1km2 plot near Gongoni village in Kilosa district in
Tanzania.
3. UAV and Sensors
Fixed Wing: senseFly eBee
Endurance: ~25 to 35 minutes
Weight: ~700 grams
Sensors: RGB and NIR Canon S110 Cameras
Here we present an object based approach to estimate
crop metrics like crop type, and area using multi-
temporal UAV based imagery.
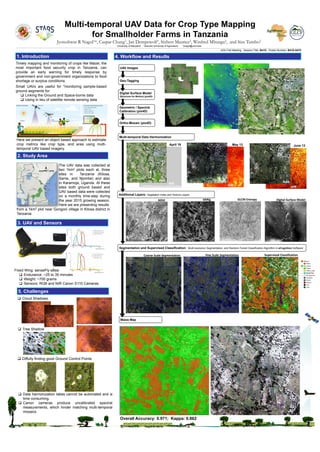
4. Workflow and Results
5. Challenges
April 19 May 13 June 13
Segmentation and Supervised Classification: Multi-resolution Segmentation, and Random Forest Classification Algorithm in eCognition Software
VARIg Digital Surface ModelNDVI GLCM Entropy
Coarse Scale Segmentation Fine Scale Segmentation Supervised Classification
Cloud Shadows
Tree Shadow
Overall Accuracy: 0.971; Kappa: 0.862
Diffulty finding good Ground Control Points
Data harmonization takes cannot be automated and is
time consuming.
Canon cameras produce uncalibrated spectral
measurements, which hinder matching multi-temporal
mosaics
RGB RGB RGB
Failed Mosaic due to cloud shadow NIR NIR
NIR
AGU Fall Meeting Session Title: B41D Poster Number: B41D-0470