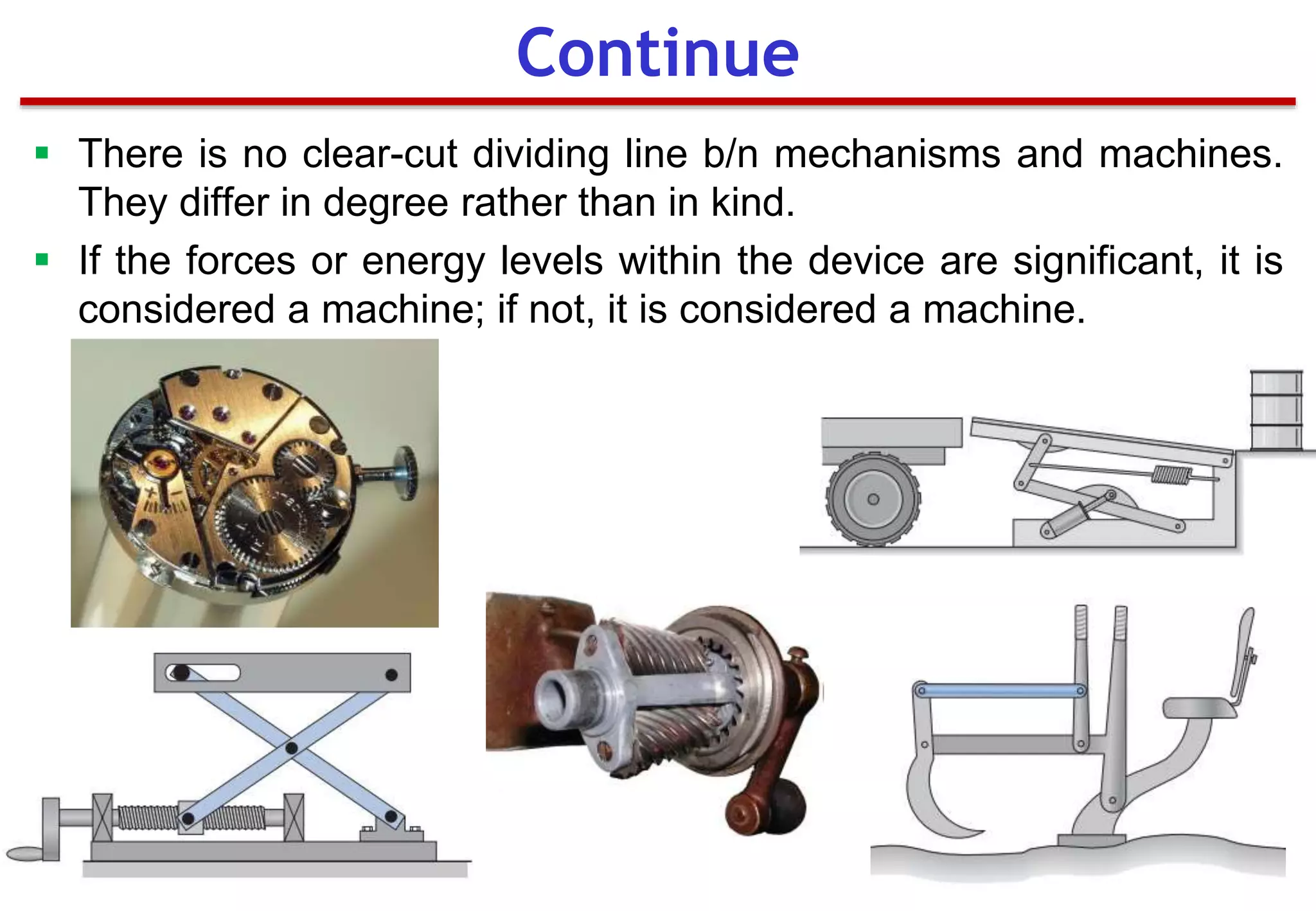
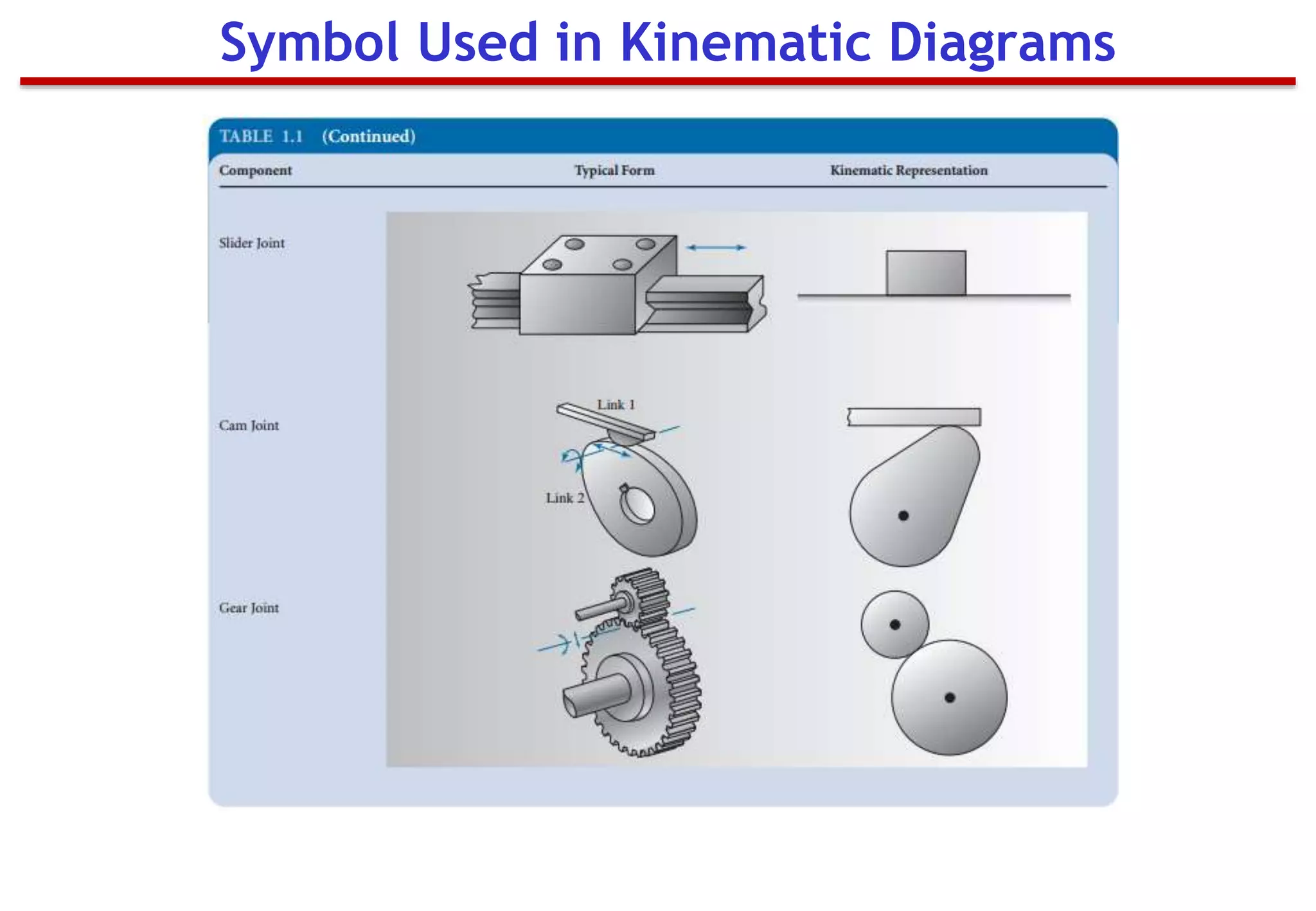
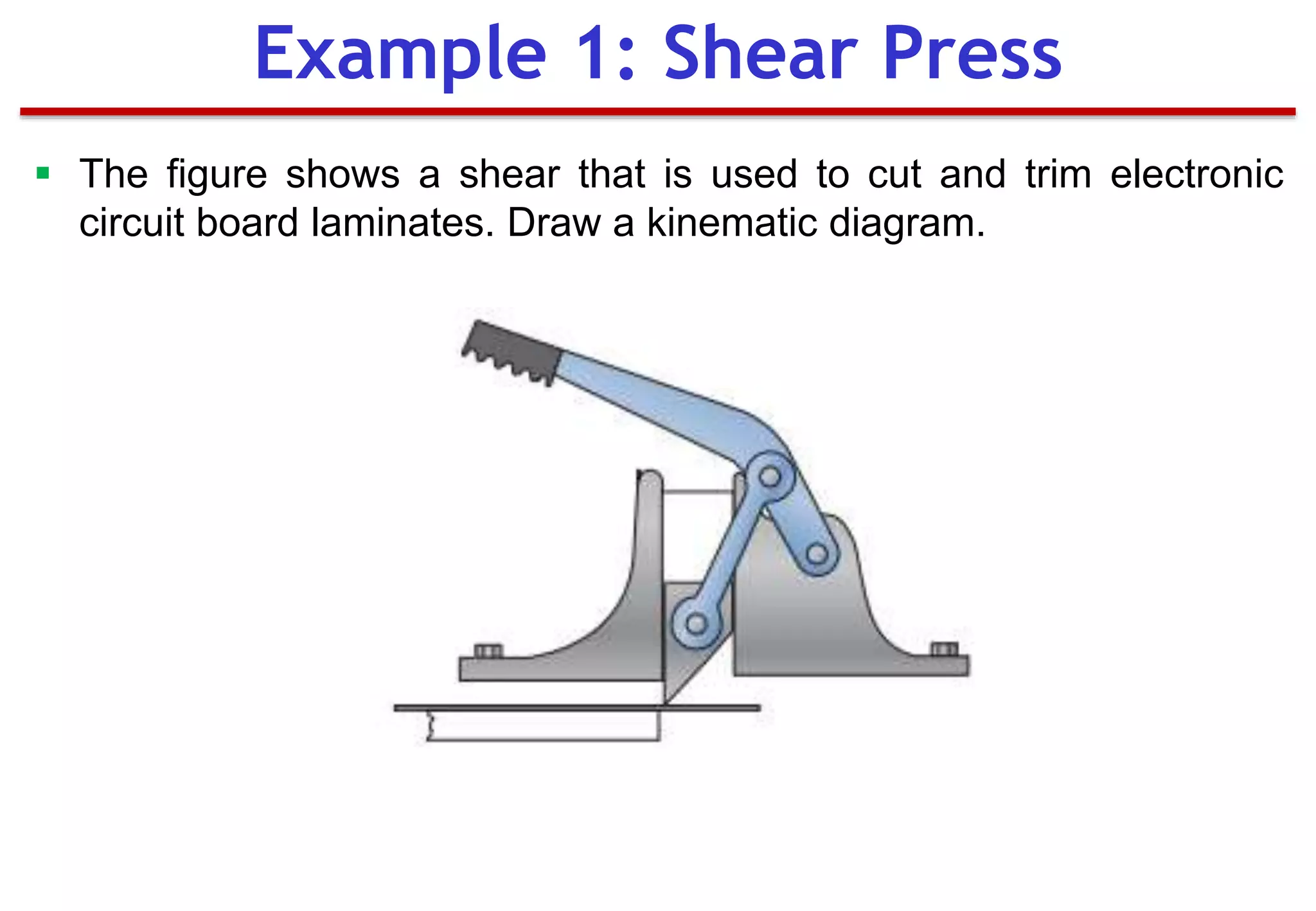
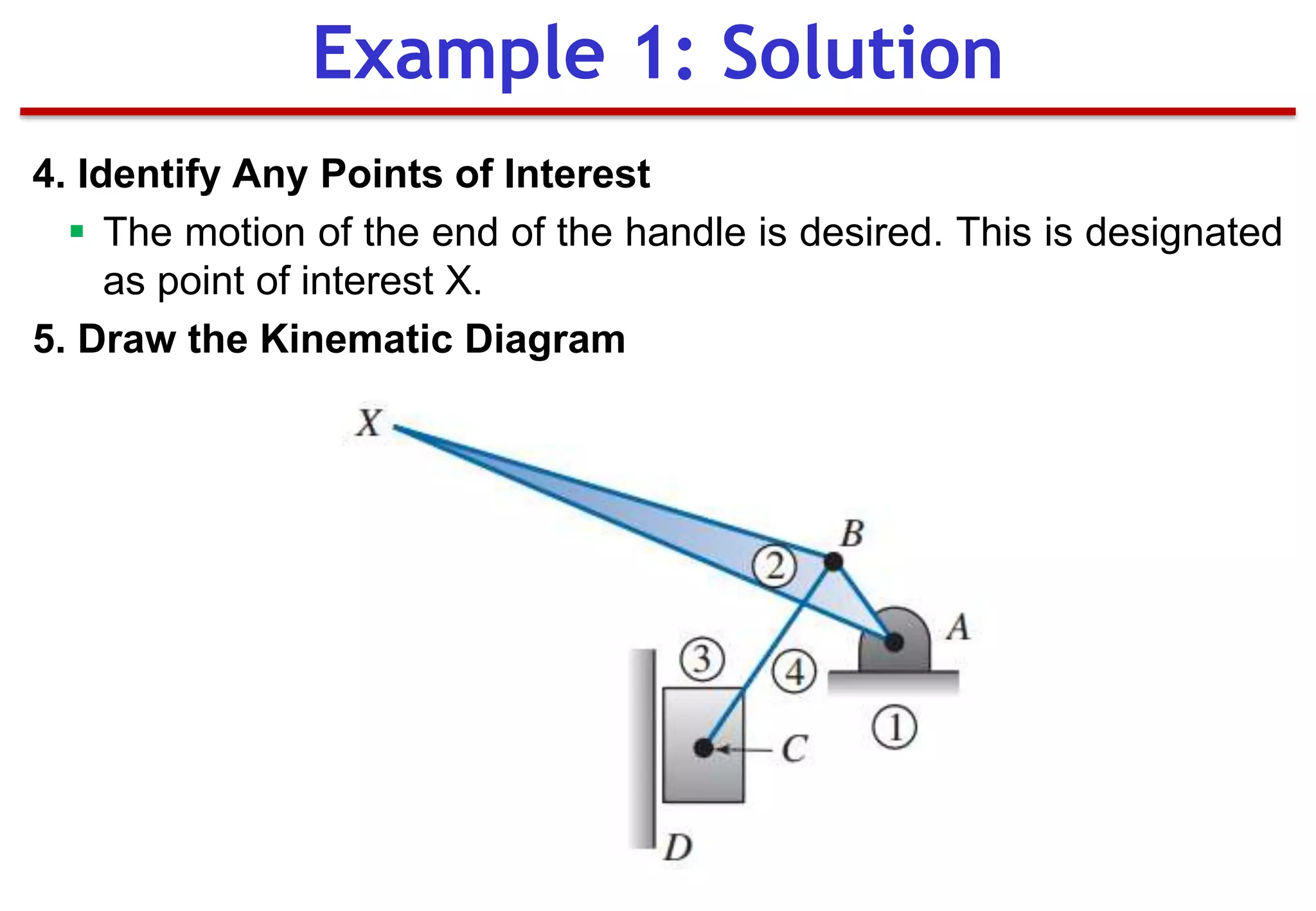
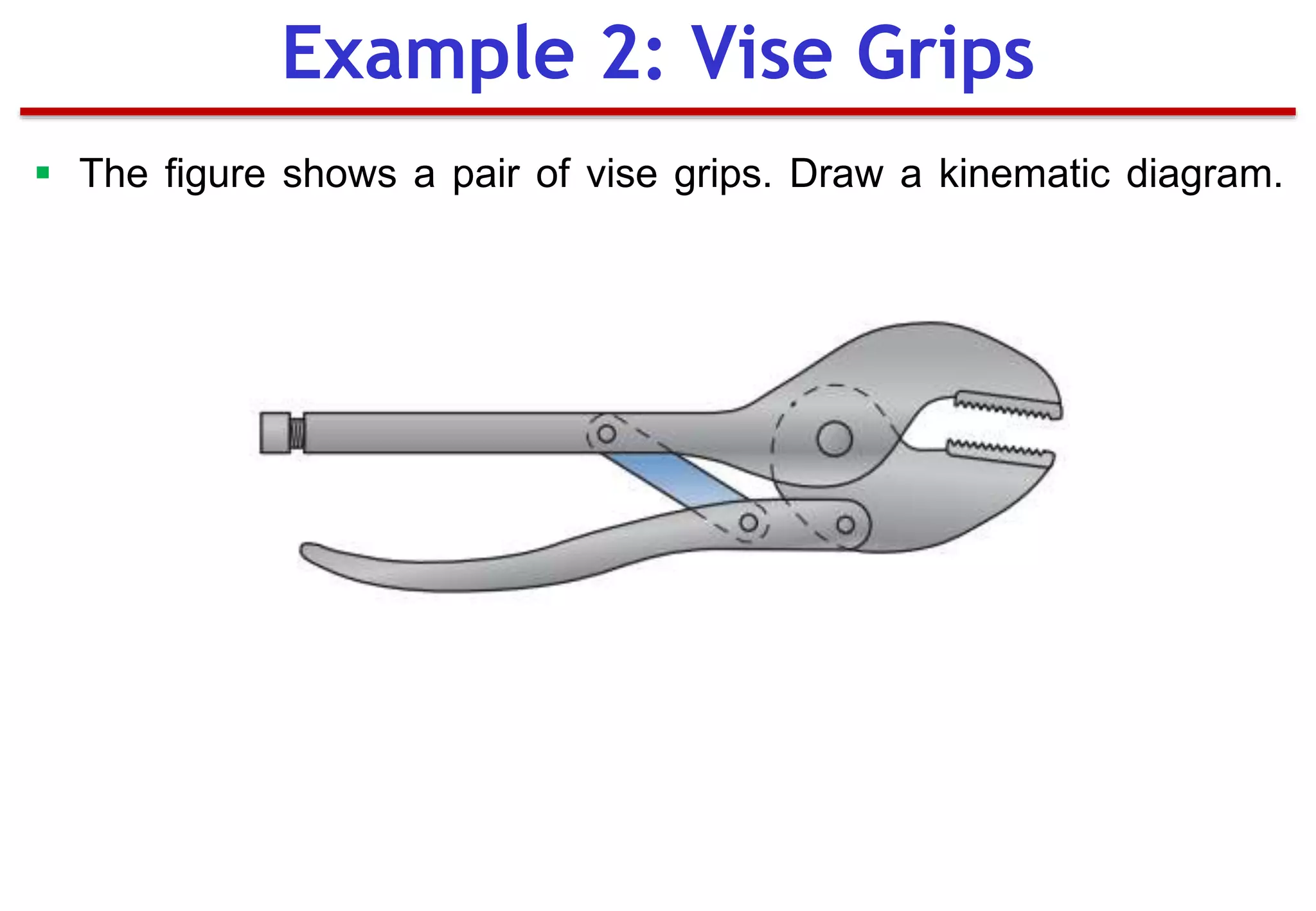
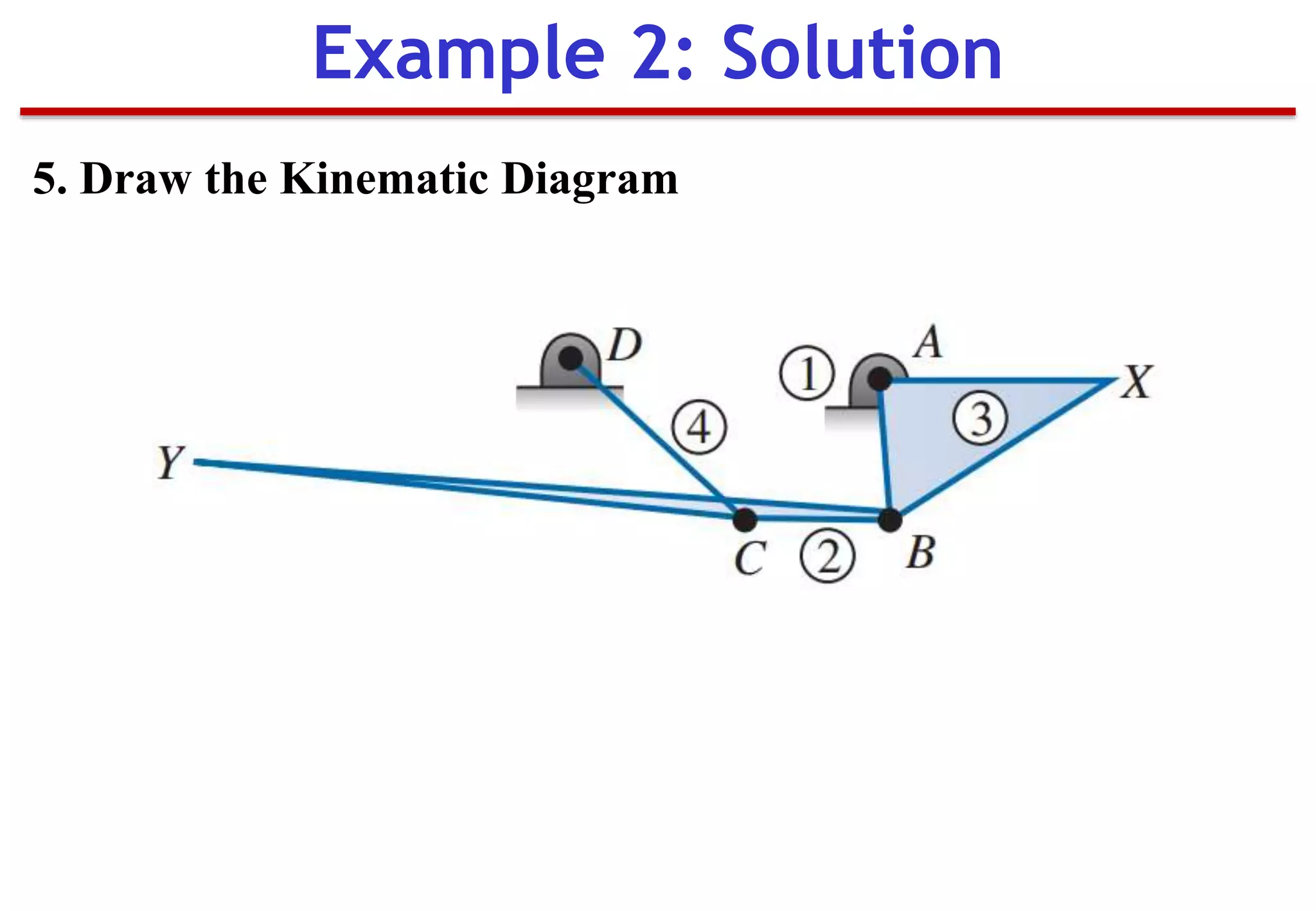
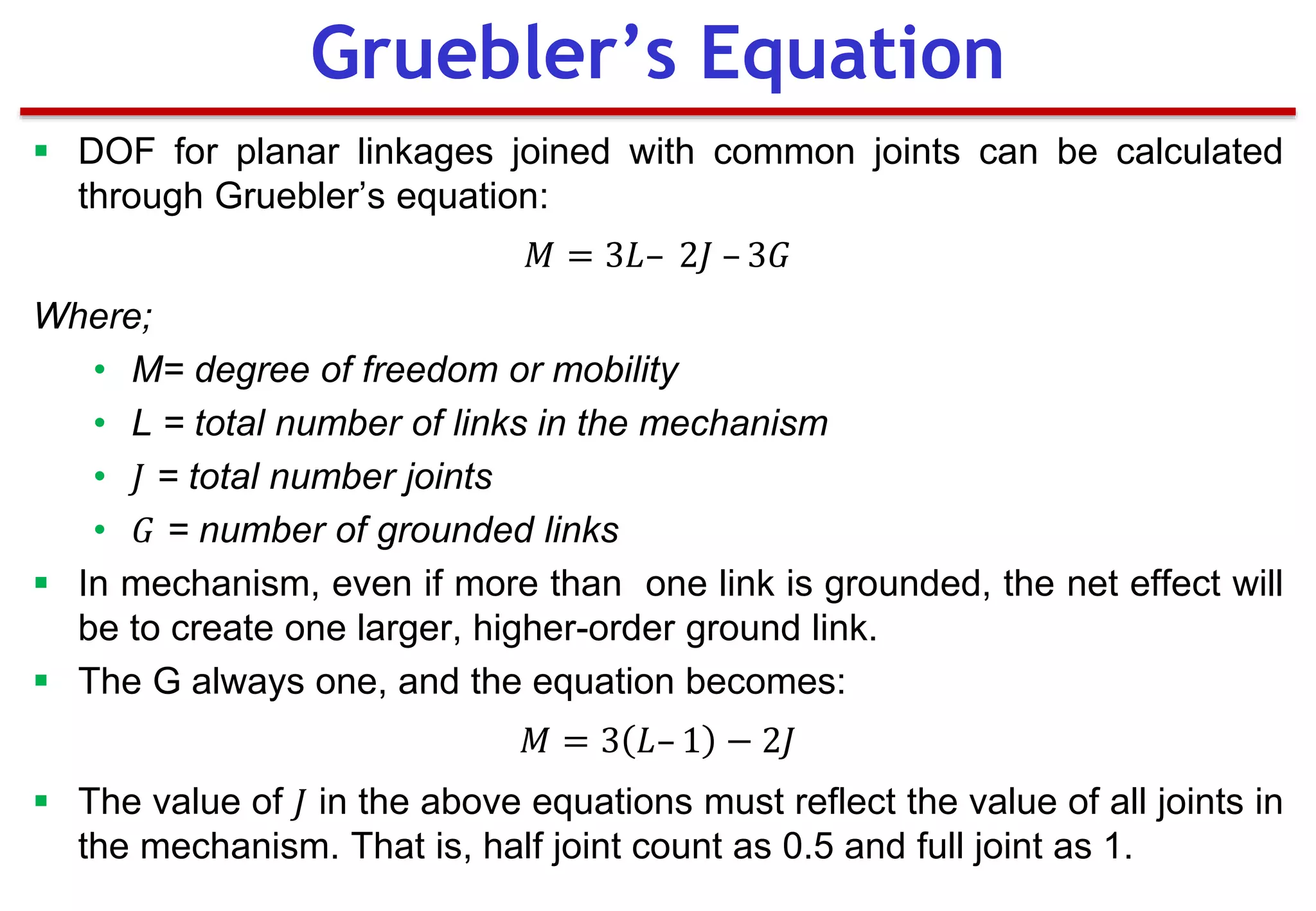
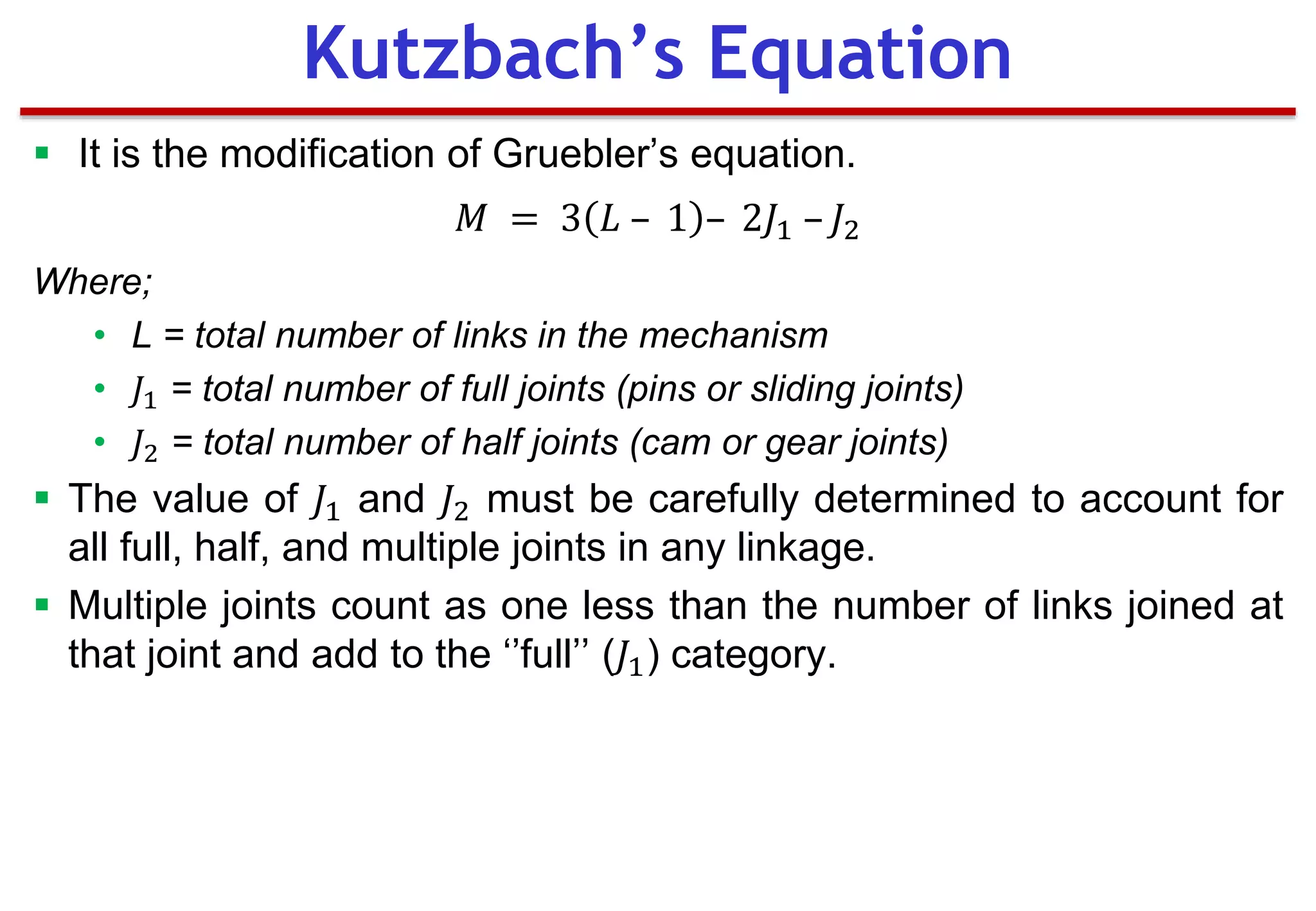
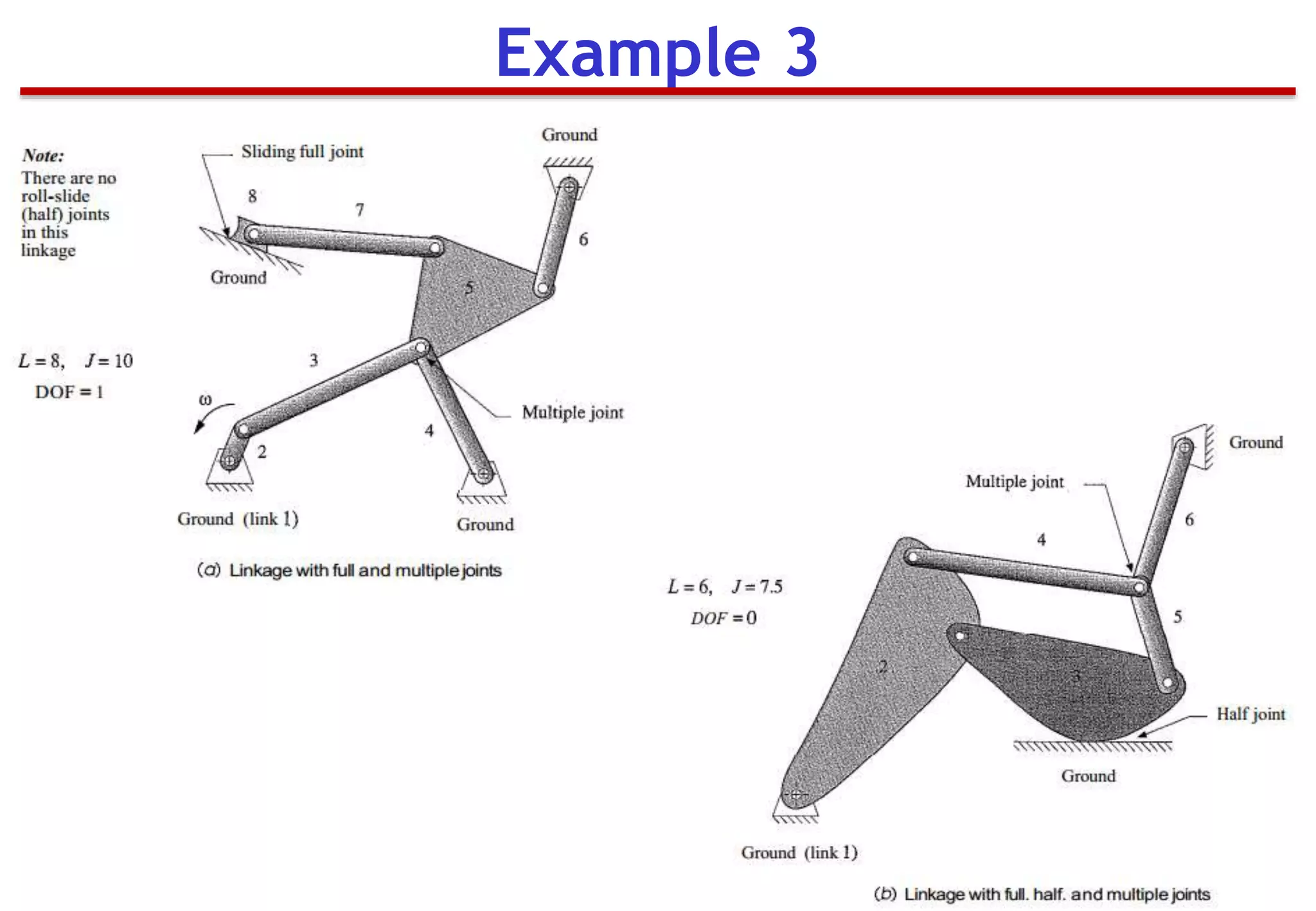
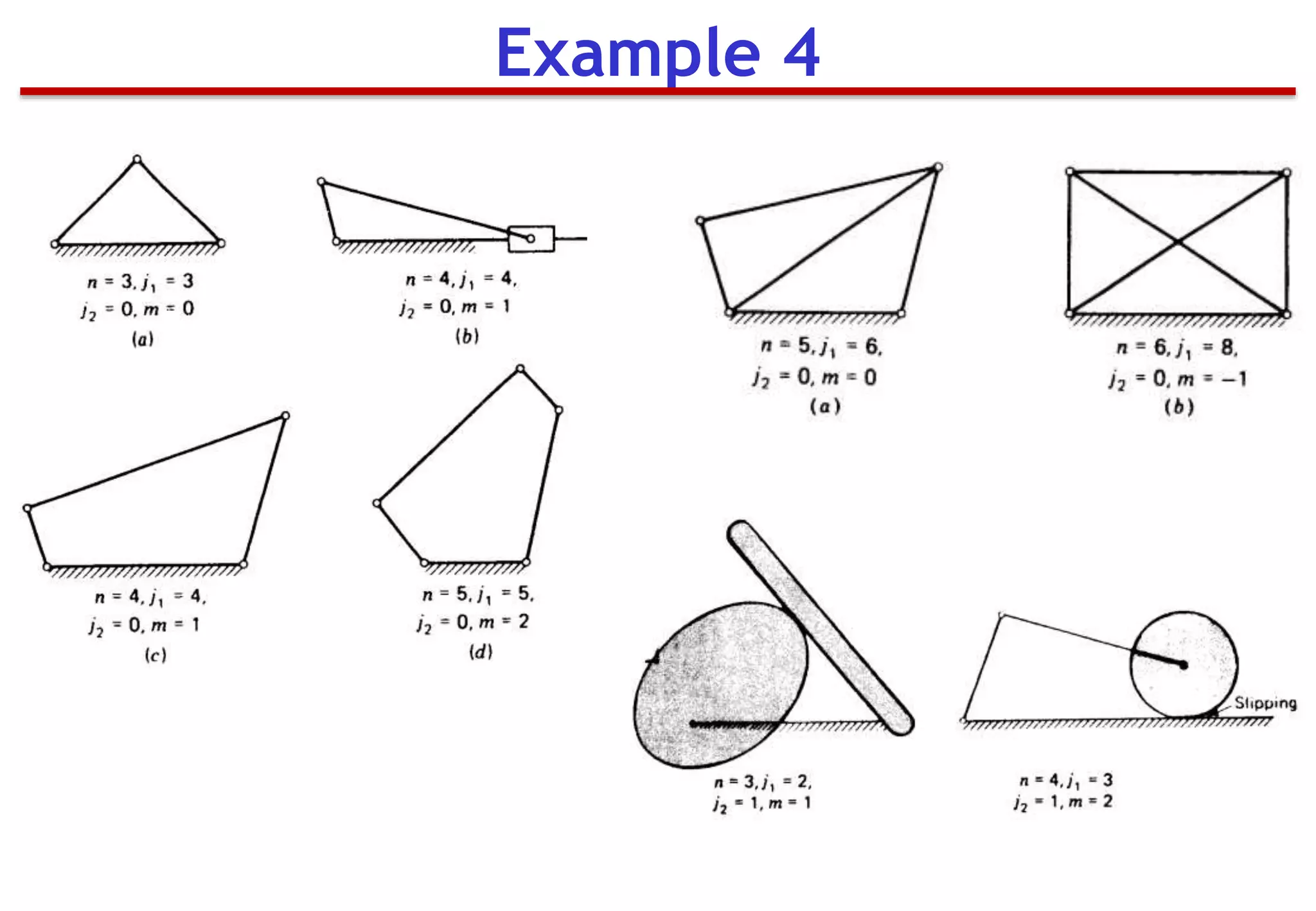
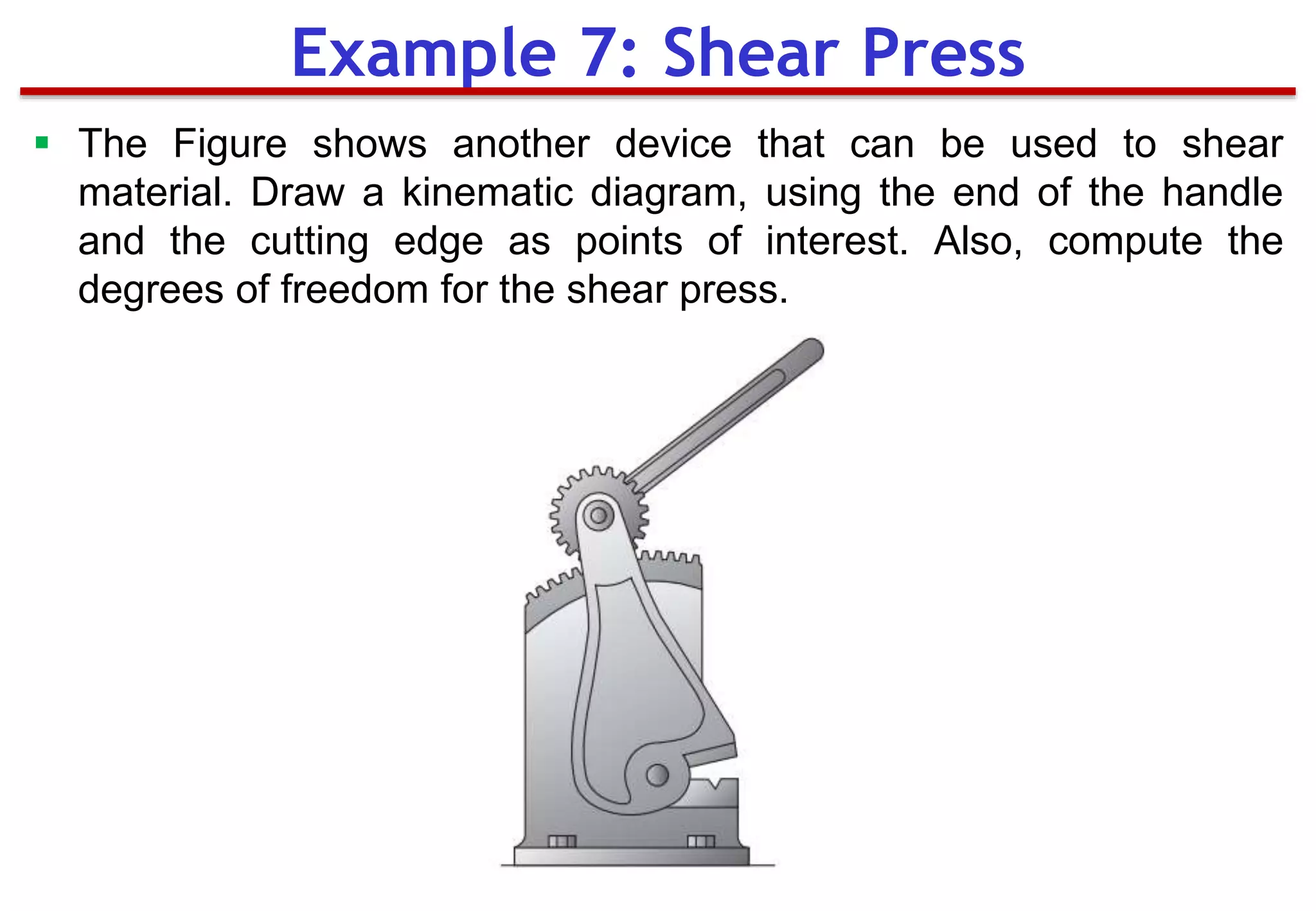
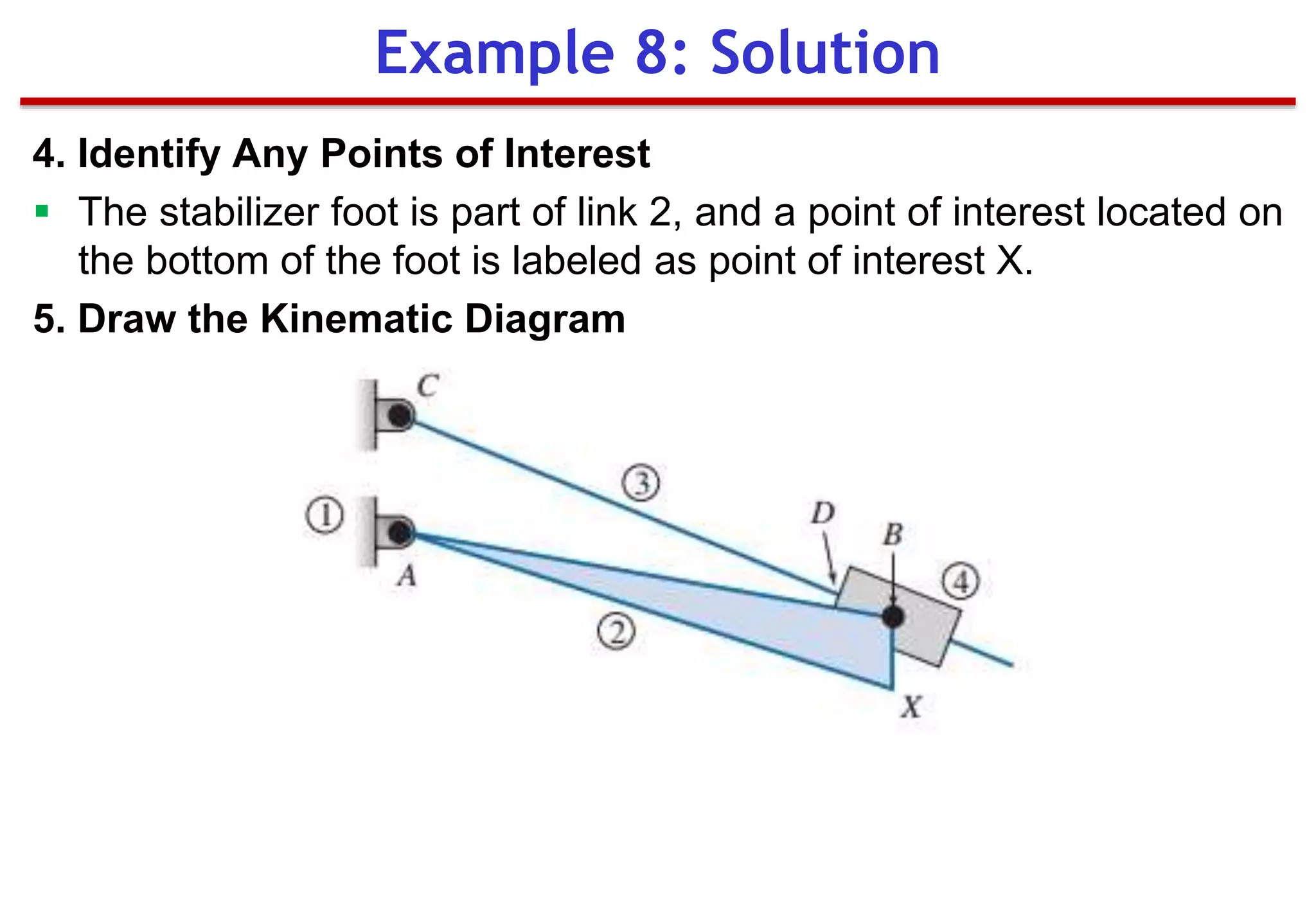
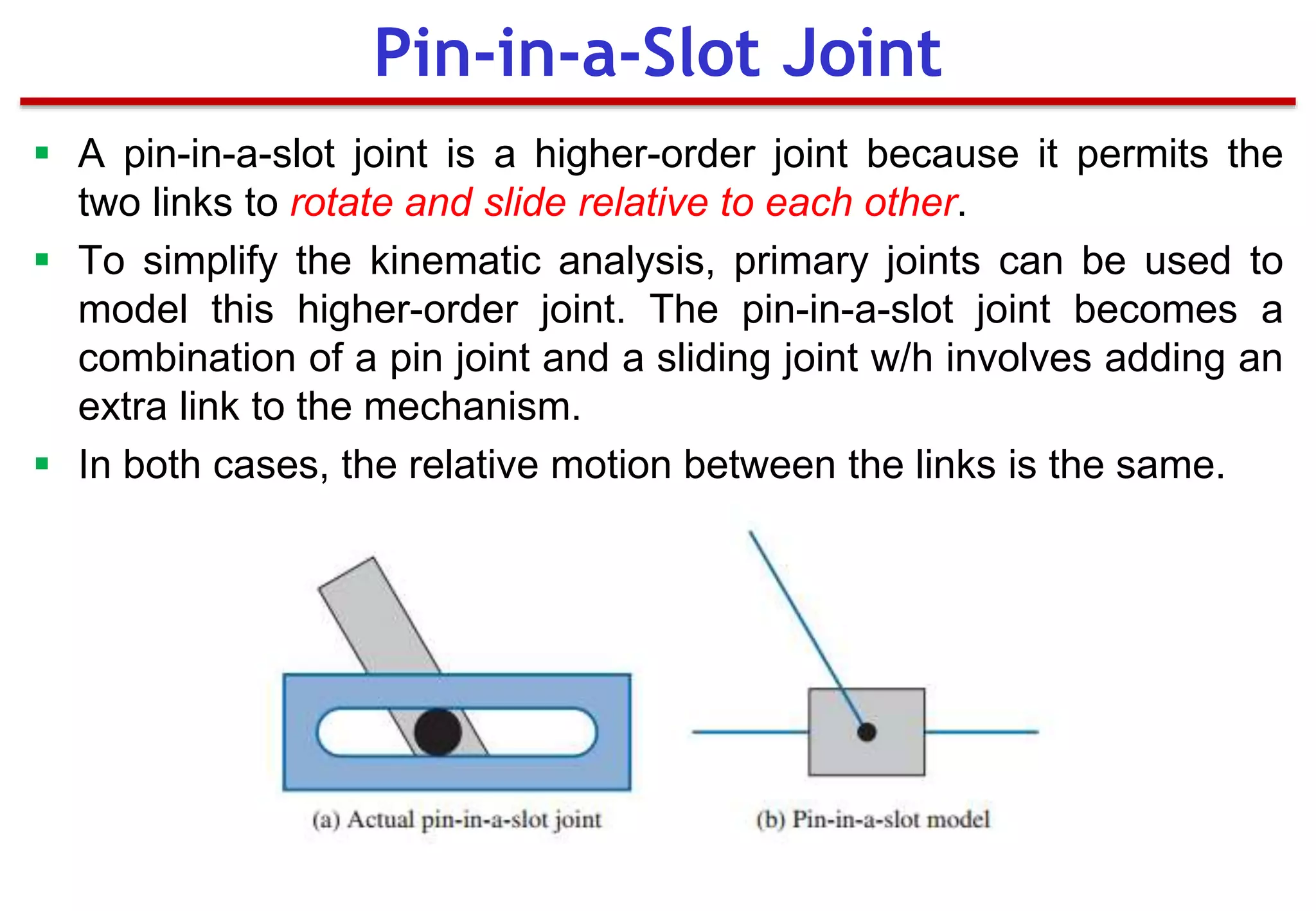
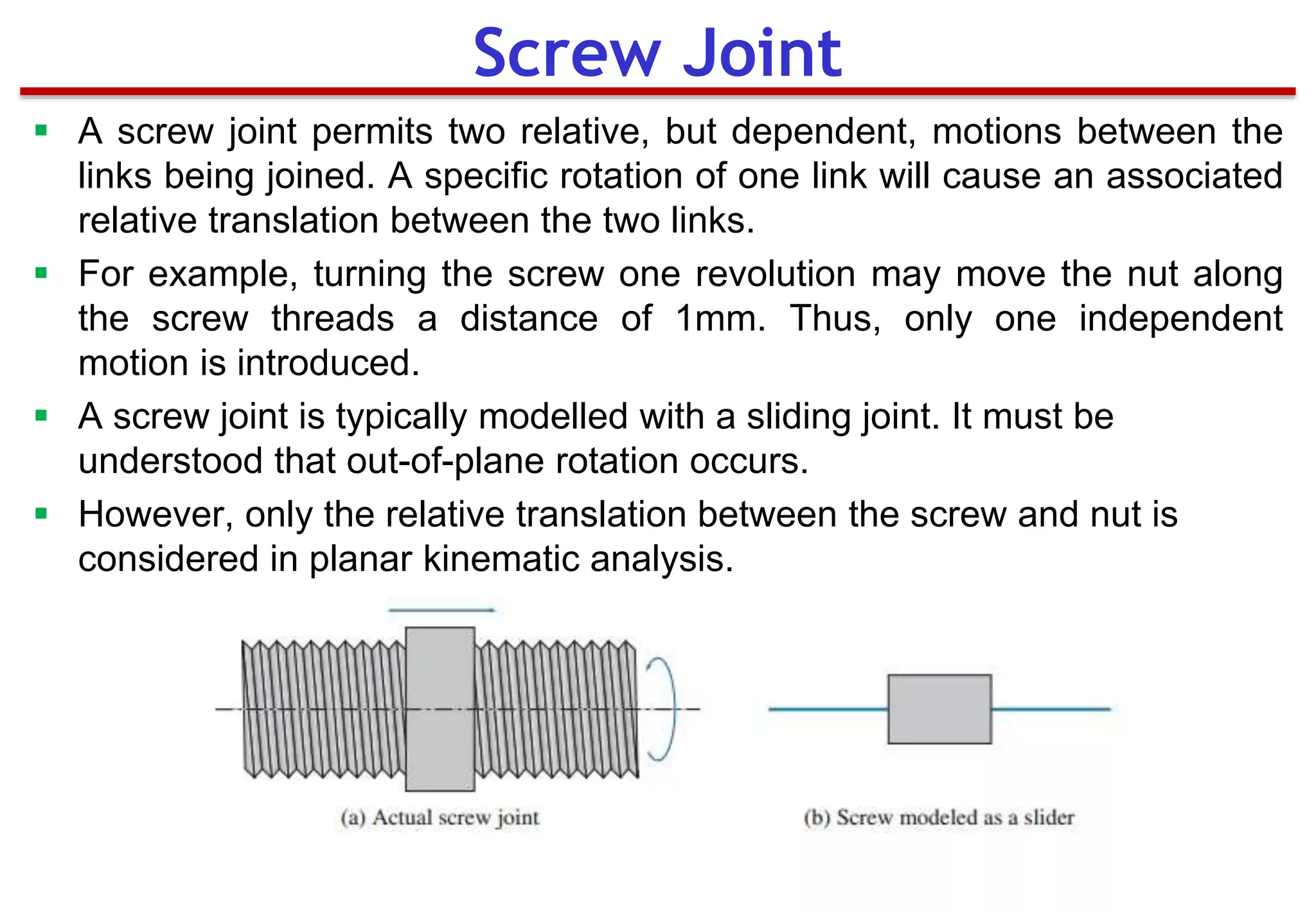
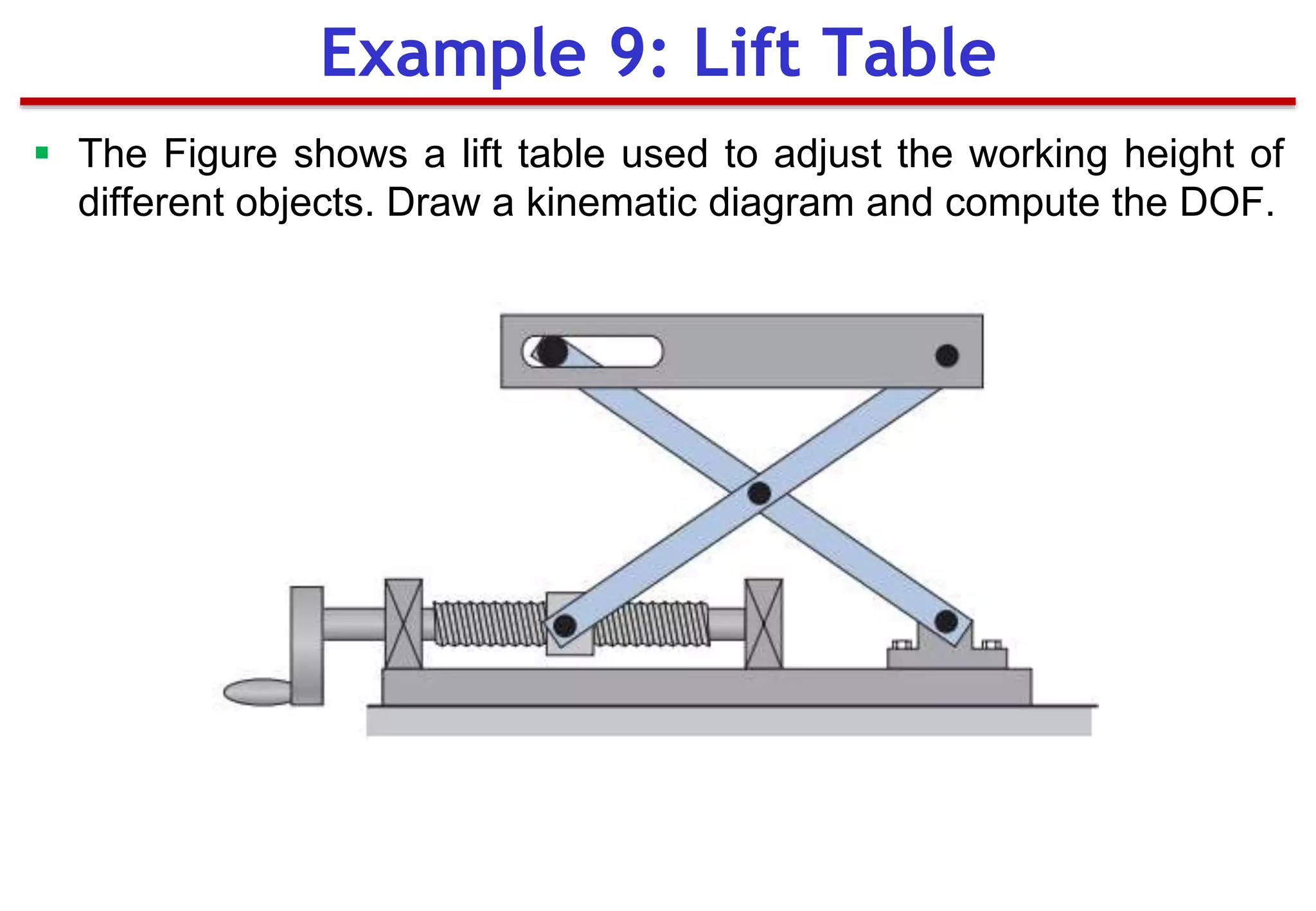
This document provides an introduction to mechanisms of machinery. It discusses key concepts like kinematics, which is the study of motion without regard to forces, and kinetics, which is the study of forces on systems in motion. It also defines mechanisms and machines, and distinguishes between the two. Important mechanism terminology is introduced, such as links, joints, degrees of freedom, and kinematic diagrams. Examples of kinematic diagrams are provided for a shear press and vise grips to illustrate how to draw the diagrams and identify the relevant components. Formulas for calculating the degree of freedom using Gruebler's equation and Kutzbach's equation are also presented.