OTTO 電子零件
▪ LinkIt7697
▪ Robot Shield
▪ 伺服馬達 x 4
• OTTO 才會動
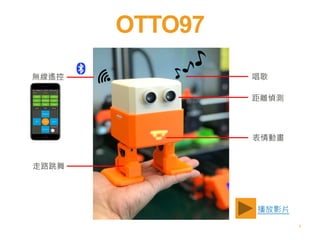
▪ 超音波
• OTTO 才有眼睛
• OTTO 可以測前方距離
▪ 有源蜂鳴器
• 選配
• OTTO 可以唱歌
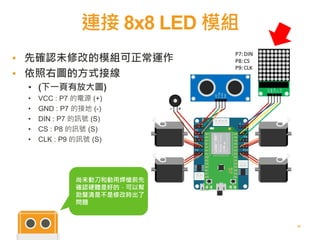
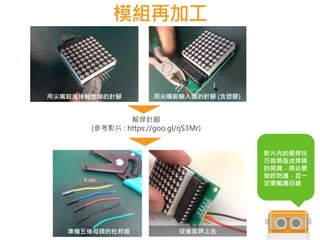
▪ 8x8 LED 矩陣
• 選配, 需用到焊槍
• OTTO 會有嘴巴圖案
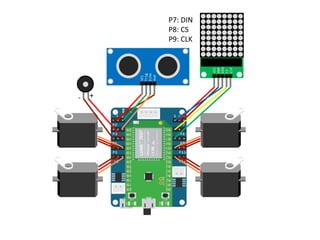
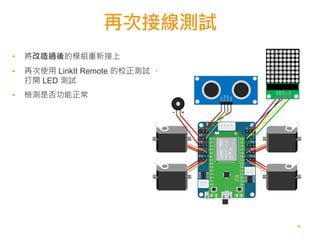
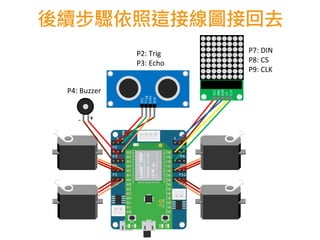
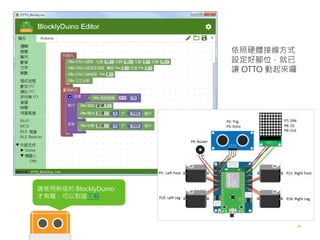
先大概看一下接法。後
續步驟會一個一個接上
16.
組合 LinkIt 7697+ Robot Shield
16
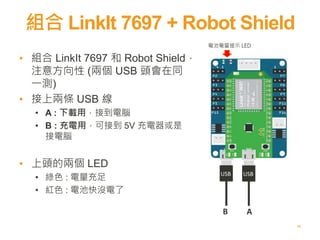
▪ 組合 LinkIt 7697 和 Robot Shield,
注意方向性 (兩個 USB 頭會在同
一測)
▪ 接上兩條 USB 線
• A : 下載用,接到電腦
• B : 充電用,可接到 5V 充電器或是
接電腦
▪ 上頭的兩個 LED
• 綠色 : 電量充足
• 紅色 : 電池快沒電了
- + s s
USB USB
AB
電池電量提示 LED