2. The University of Sydney Page 2
Research motivation
To perform reliable localisation and navigation in GPS-denied
environment or on UAV missions an alternative system to GNSS is
required
Visual navigation matches the requirements:
– independence: localisation and positioning without reliance
upon external infrastructure (GPS)
– reliability and availability: data association in terrain-aided
navigation (TAN) or simultaneous localisation and mapping
(SLAM)
– availability: real-time operation
3. The University of Sydney Page 3
Existing approaches
GIS/Map update
- manually initisialised
- computationally
expensive
- case specific
Computer vision for
MAVs
- low-level
- corner-based
Not feasible on altitudes
of 500+
Approaches applicable in
visual navigation
• automatic
• semantic
• DB/map-based
• producing
meaningful output
4. The University of Sydney Page 4
Goal of the study
– To compare and categorise the existing feature-extraction methods
– To identify the optimal structure of a feature-extraction algorithm
– To choose the approaches suitable for visual navigation according to
the defined criteria
5. The University of Sydney Page 5
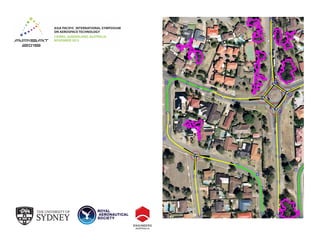
Feature detection
– Road network
– Buildings
– Water bodies
– Other objects (rooves, pools, etc)
Features can be temporary database entries (for SLAM) or
permanent and compiled a-priori (for TAN)
6. The University of Sydney Page 6
Typical road feature extraction steps
1 2
3 4
7. The University of Sydney Page 7
Scope of the study
• Segmentation
• Thresholding
• Texture progressive analysis (TPA)
• Mathematical morphology, line grouping
• Clustering: K-means, mean shift, Fuzzy clustering
• Markov random fields(MRF) and conditional random fields (CRF)
• Graph cuts, tensor voting
• Classification
• Artificial neural networks (ANN) and genetic algorithms (GA)
• Support vector machines (SVM)
• Road tracking
• Template and profile matching
• Directional angular operators
• Snakes and dynamic programming
• Level sets
8. The University of Sydney Page 8
Typical image processing flow of a road extraction
algorithm
9. The University of Sydney Page 9
Typical image processing flow of a road extraction
algorithm (continued)
10. The University of Sydney Page 10
Summary
The comparison study took into account the following criteria:
• Method of road extraction
• Initialisation
• Decision making
• Derived information (output)
• Computational power of the system
• Advantages
• Disadvantages
• Completeness / Correctness / Quality
11. The University of Sydney Page 11
Summary of the comparison study
See the paper for the details
12. The University of Sydney Page 12
Conclusions
• Low level approaches alone cannot provide all the desired
information with the level of certainty required for feature
association or database generation
• Hierarchical, distributed or sequential systems, which
incorporate geometric and radiometric properties of the road
and a priori data to constrain the extraction, are preferred
• Preferred approaches are SVM, graph-cuts and TPA, or hybrid
segmentation techniques (e.g. fuzzy clustering combined with
road tracking or line grouping)
• Choice of the extraction approach should be context-specific,
and should take into account the processing power of the
system and desired output characterising the feature
13. The University of Sydney Page 13
Future work
To develop an adaptive generic algorithm that:
• Uses the preferred road-extraction approach
• Does not require manual intervention or training during
operation
• Takes a multi-pronged feature detection approach
• Includes a-priori knowledge of the environment if available
• Uses context-specific detection and extraction of road (in
developed urban area, suburban etc.)