Downloaded 382 times


![Problematic Instructions (2)
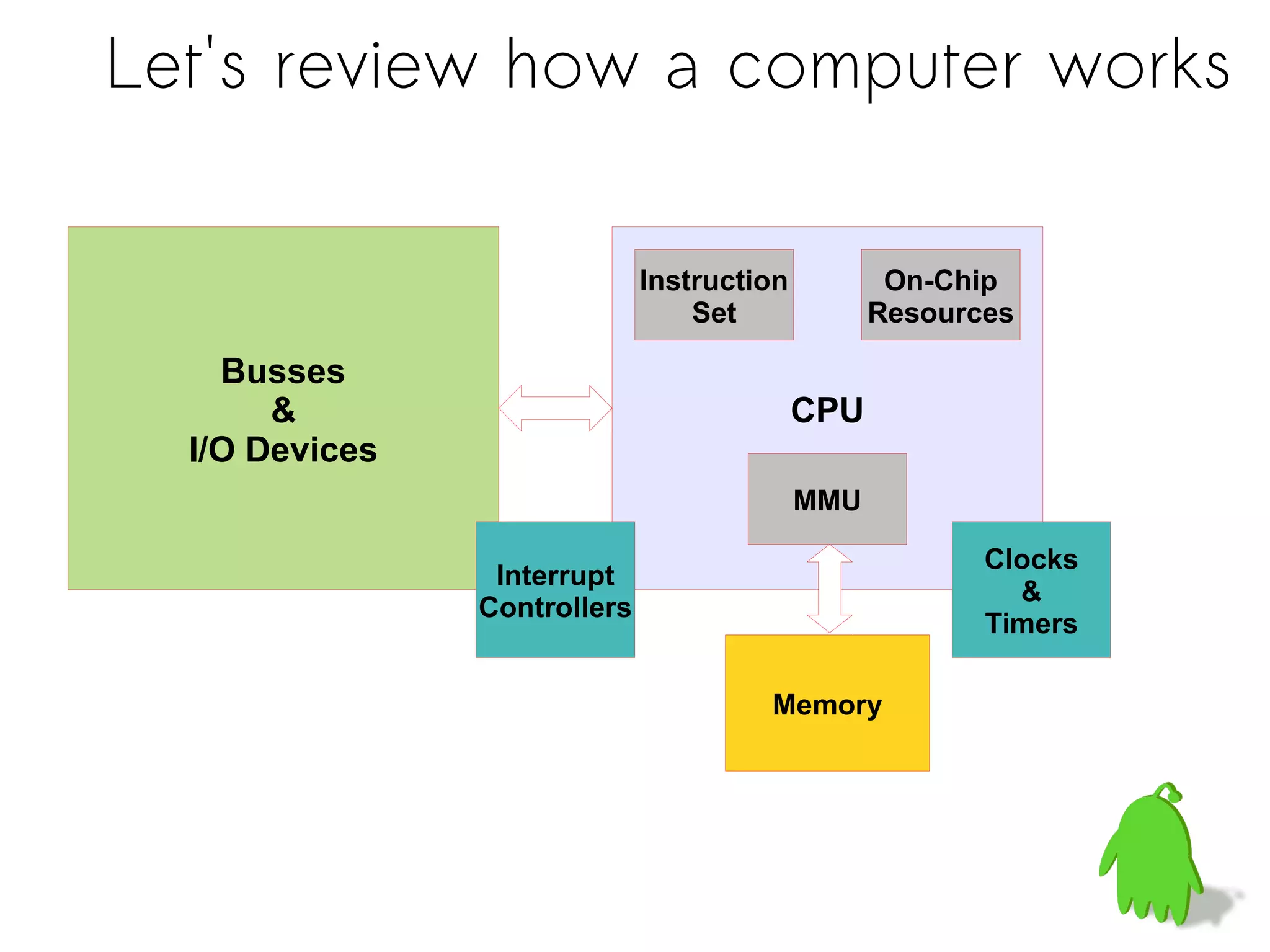
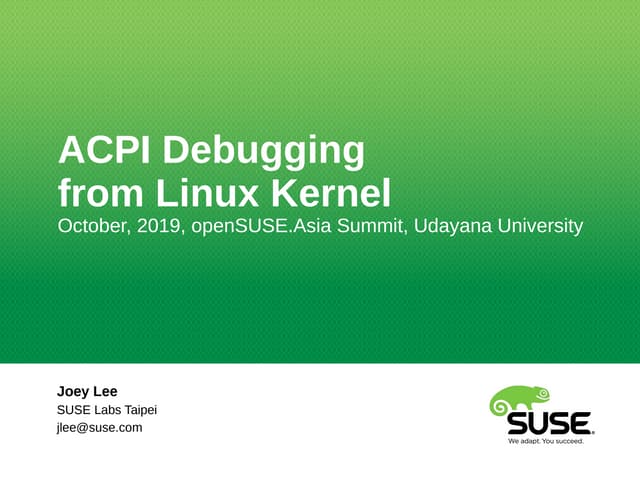
• Type 2
Instructions which executed in user mode will have
no effect
• Example
MSR cpsr_c, #0xD3
Switch to privileged mode and disable interrupt
N Z C V Q -- J -- GE[3:0] -- E A I F T M[4:0]
31 0
Execution
Flags
Exception
Mask
Execution
Mode
Program Status Register (PSR)](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-13-2048.jpg)
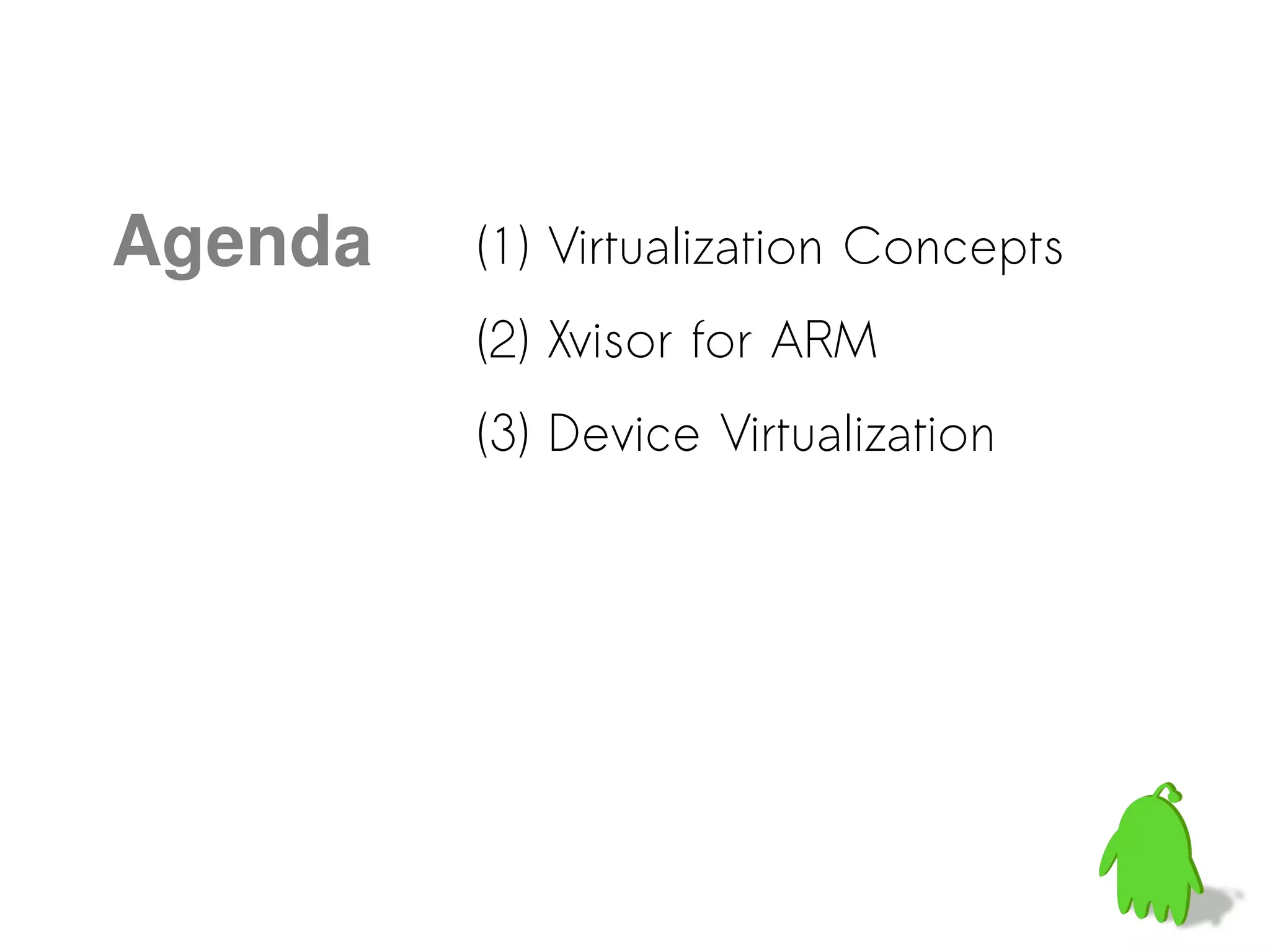
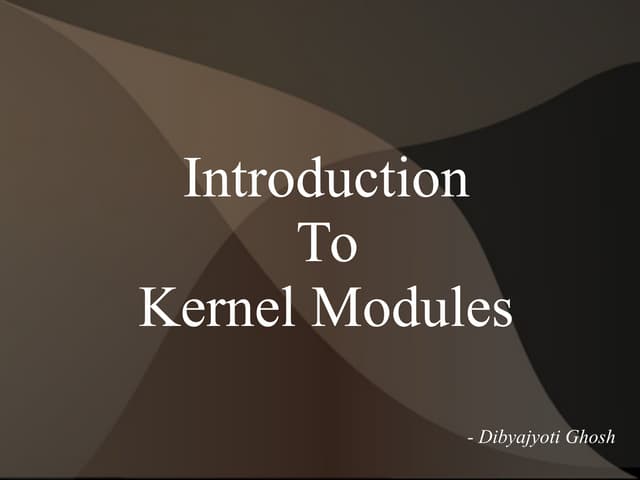
![Solutions to Problematic Instructions
[ Hardware Techniques ]
• Privileged Instruction Semantics dictated/translated
by instruction set architecture
• MMU-enforced traps
– Example: page fault
• Tracing/debug support
– Example: bkpt (breakpoint)
• Hardware-assisted Virtualization
– Example: extra privileged mode, HYP, in ARM
Cortex-A15](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-16-2048.jpg)
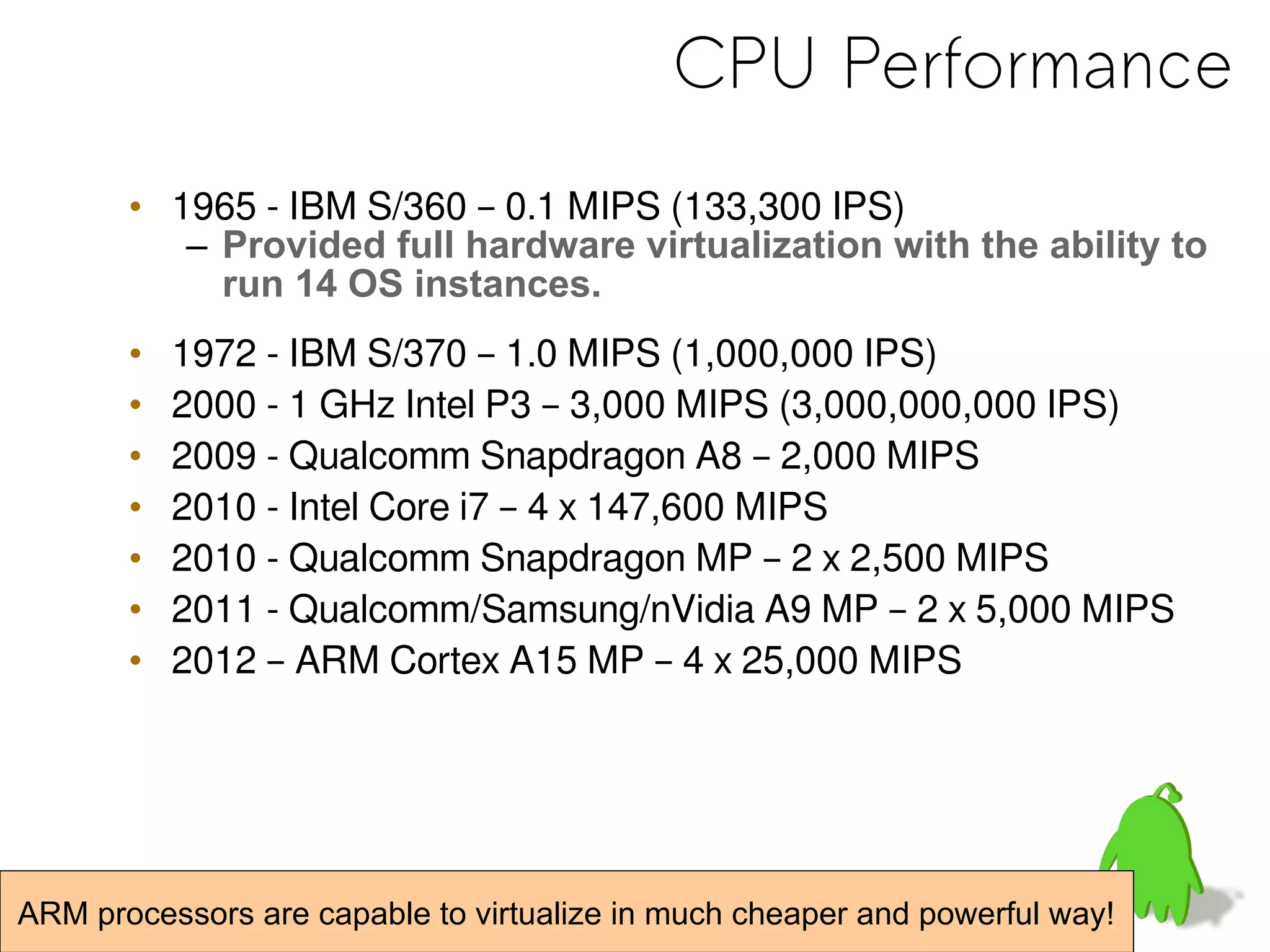
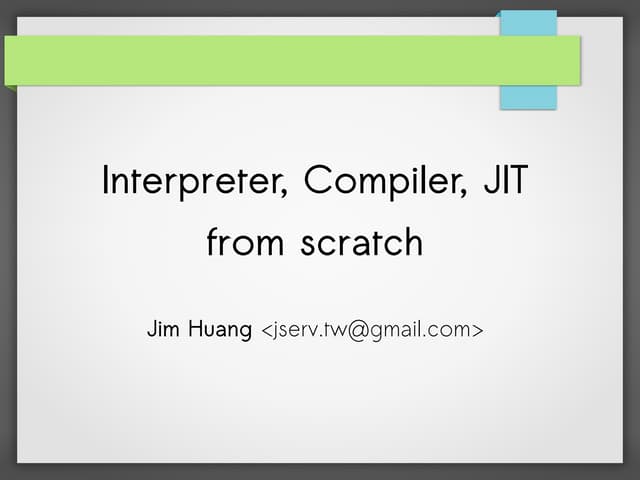
![Complexity
Binary
translation
Hypercall
Design High Low
Implementation Medium High
Runtime High Medium
Method: trap and emulate
Solutions to Problematic Instructions
[ Software Techniques ]](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-17-2048.jpg)
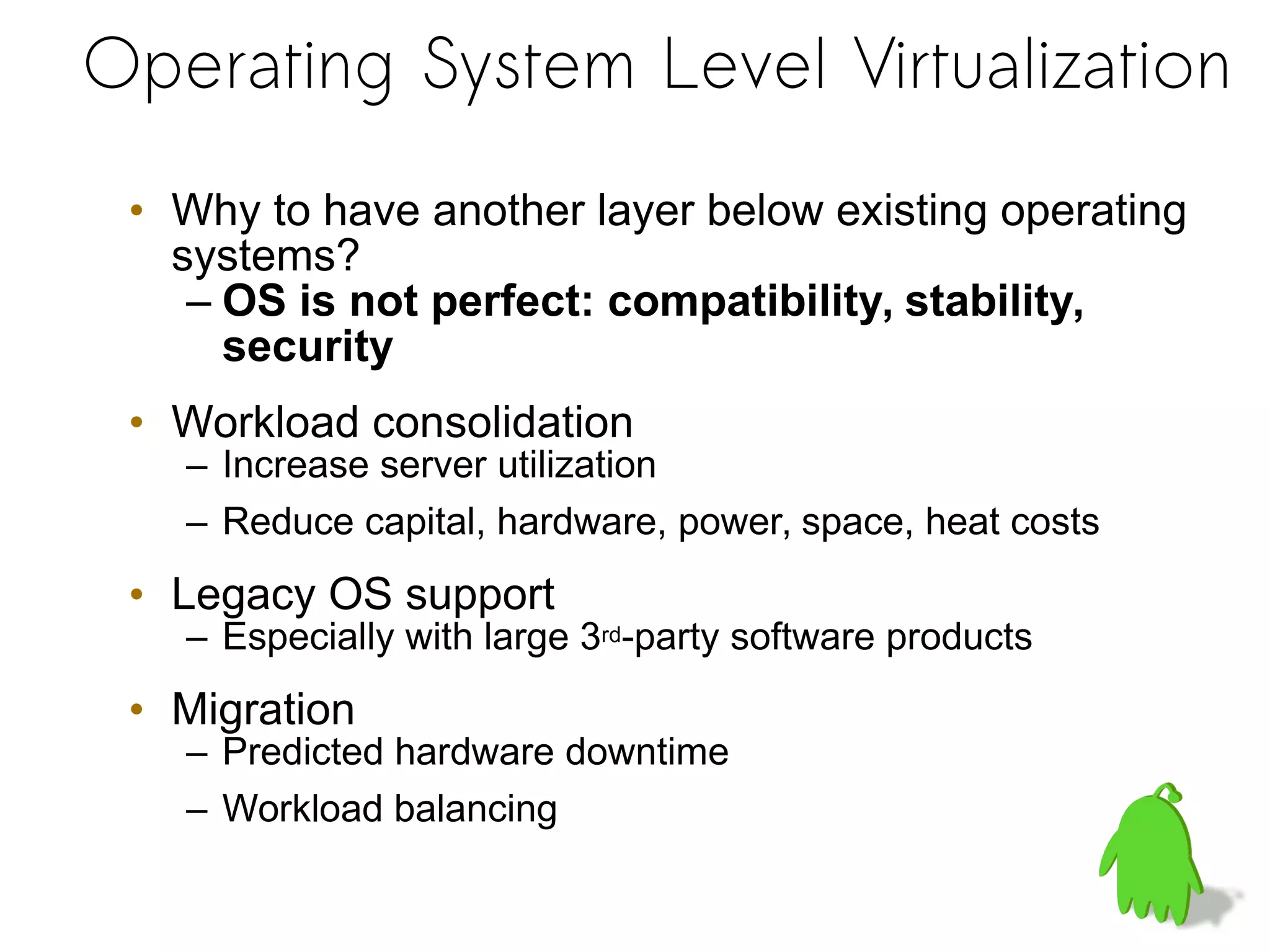
![Virtualization APIs – hypercalls
BL TLB_FLUSH_DENTRY
…
TLB_FLUSH_DENTRY:
MOV R1, R0
MOV R0, #CMD_FLUSH_DENTRY
SWI #HYPER_CALL_TLB
…
Restore User Context & PC
SWI Handler
Hypercall Handler
……
LDR R1, [SP, #4]
MCR p15, 0, R1, C8, C6, 1
/* In Hypervisor */
/* In Guest OS */
• Use trap instruction to issue hypercall
• Encode hypercall type and original instruction bits in hypercall hint
• Upon trapping into the VMM, decode the hypercall type and the original
instruction bits, and emulate instruction semantics
mrs r8, cpsr swi 0x088000
mrs Rd, R <cpsr/spsr>](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-19-2048.jpg)
![elf2cpatch.py :
...
if (len(w)==3):
if (w[2]=="wfi"):
print "t#", w[2]
print "twrite32,0x%x,0x%08x" % (addr, convert_wfi_inst(w[1]))
elif (len(w)==4):
if (w[2]=="cps" or w[2]=="cpsie" or w[2]=="cpsid"):
print "t#", w[2], w[3]
print "twrite32,0x%x,0x%08x" % (addr, convert_cps_inst(w[1]))](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-23-2048.jpg)
![How does Xvisor handle problematic
instructions like MSR?
• Type 2
Instructions which executed in user mode will have
no effect
• Example
MSR cpsr_c, #0xD3
Switch to privileged mode and disable interrupt
N Z C V Q -- J -- GE[3:0] -- E A I F T M[4:0]
31 0
Execution
Flags
Exception
Mask
Execution
Mode
Program Status Register (PSR)](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-24-2048.jpg)
![MSR cpsr_c, #0xD3
Switch to privileged mode and disable interrupt
# MSR (immediate)
# Syntax:
# msr<c> <spec_reg>, #<const>
# Fields:
# cond = bits[31:28]
# R = bits[22:22]
# mask = bits[19:16]
# imm12 = bits[11:0]
# Hypercall Fields:
# inst_cond[31:28] = cond
# inst_op[27:24] = 0xf
# inst_id[23:20] = 0
# inst_subid[19:17] = 2
# inst_fields[16:13] = mask
# inst_fields[12:1] = imm12
# inst_fields[0:0] = R
First, cpatch (ELF patching tool) looks
up the instructions...](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-25-2048.jpg)
![def convert_msr_i_inst(hxstr):
hx = int(hxstr, 16)
inst_id = 0
inst_subid = 2
cond = (hx >> 28) & 0xF
R = (hx >> 22) & 0x1
mask = (hx >> 16) & 0xF
imm12 = (hx >> 0) & 0xFFF
rethx = 0x0F000000
rethx = rethx | (cond << 28)
rethx = rethx | (inst_id << 20)
rethx = rethx | (inst_subid << 17)
rethx = rethx | (mask << 13)
rethx = rethx | (imm12 << 1)
rethx = rethx | (R << 0)
return rethx
# MSR (immediate)
# Syntax:
# msr<c> <spec_reg>, #<const>
# Fields:
# cond = bits[31:28]
# R = bits[22:22]
# mask = bits[19:16]
# imm12 = bits[11:0]
# Hypercall Fields:
# inst_cond[31:28] = cond
# inst_op[27:24] = 0xf
# inst_id[23:20] = 0
# inst_subid[19:17] = 2
# inst_fields[16:13] = mask
# inst_fields[12:1] = imm12
# inst_fields[0:0] = R
Xvisor utilizes cpatch to convert
all problematic instructions for OS
image files (ELF format).](https://image.slidesharecdn.com/xvisor-140810103501-phpapp01/75/Xvisor-embedded-and-lightweight-hypervisor-26-2048.jpg)

Xvisor is an open source lightweight hypervisor for ARM architectures. It uses a technique called cpatch to modify guest operating system binaries, replacing privileged instructions with hypercalls. This allows the guest OS to run without privileges in user mode under the hypervisor. Xvisor also implements virtual CPU and memory management to isolate guest instances and virtualize physical resources for multiple operating systems.
Overview of Xvisor as a lightweight hypervisor discussing virtualization concepts and its application.
Historical CPU performance data highlights advancements in virtualization capabilities over decades.
Discusses the advantages of OS-level virtualization for workload consolidation and legacy OS support.
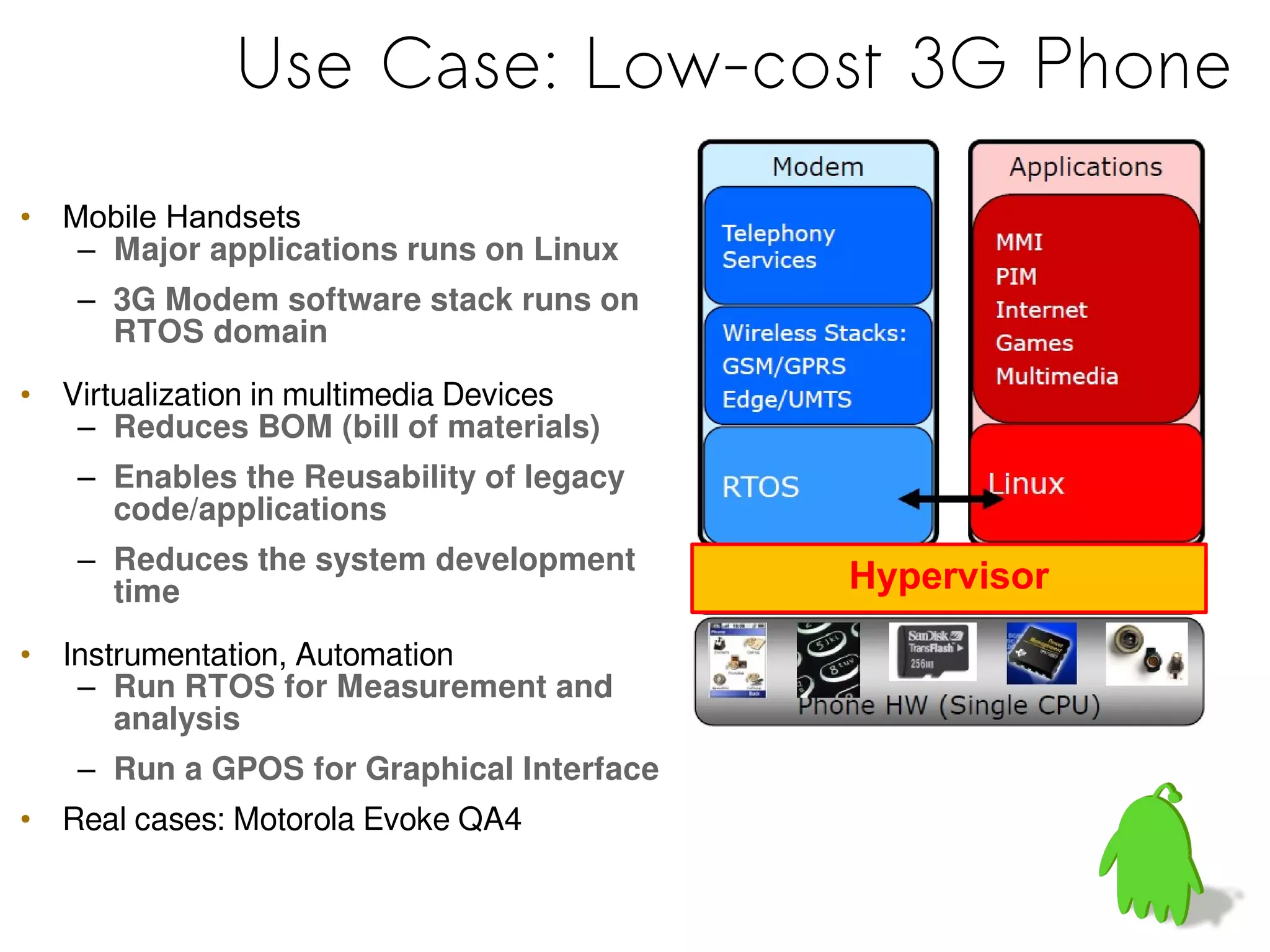
Explores mobile handset virtualization including RTOS software stack and multimedia device applications.
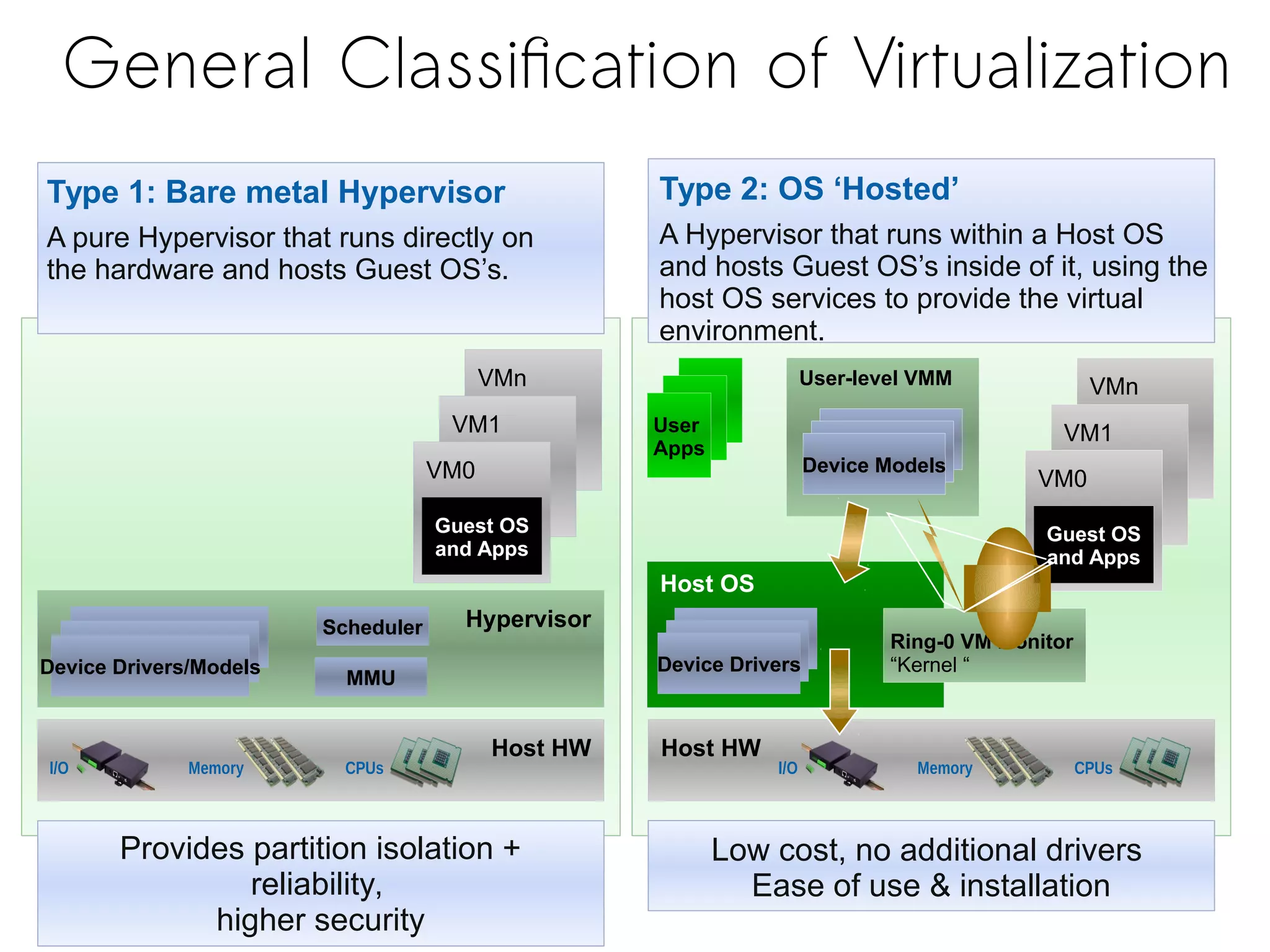
Introduces Type 1 and Type 2 hypervisors, their characteristics including costs and security benefits.
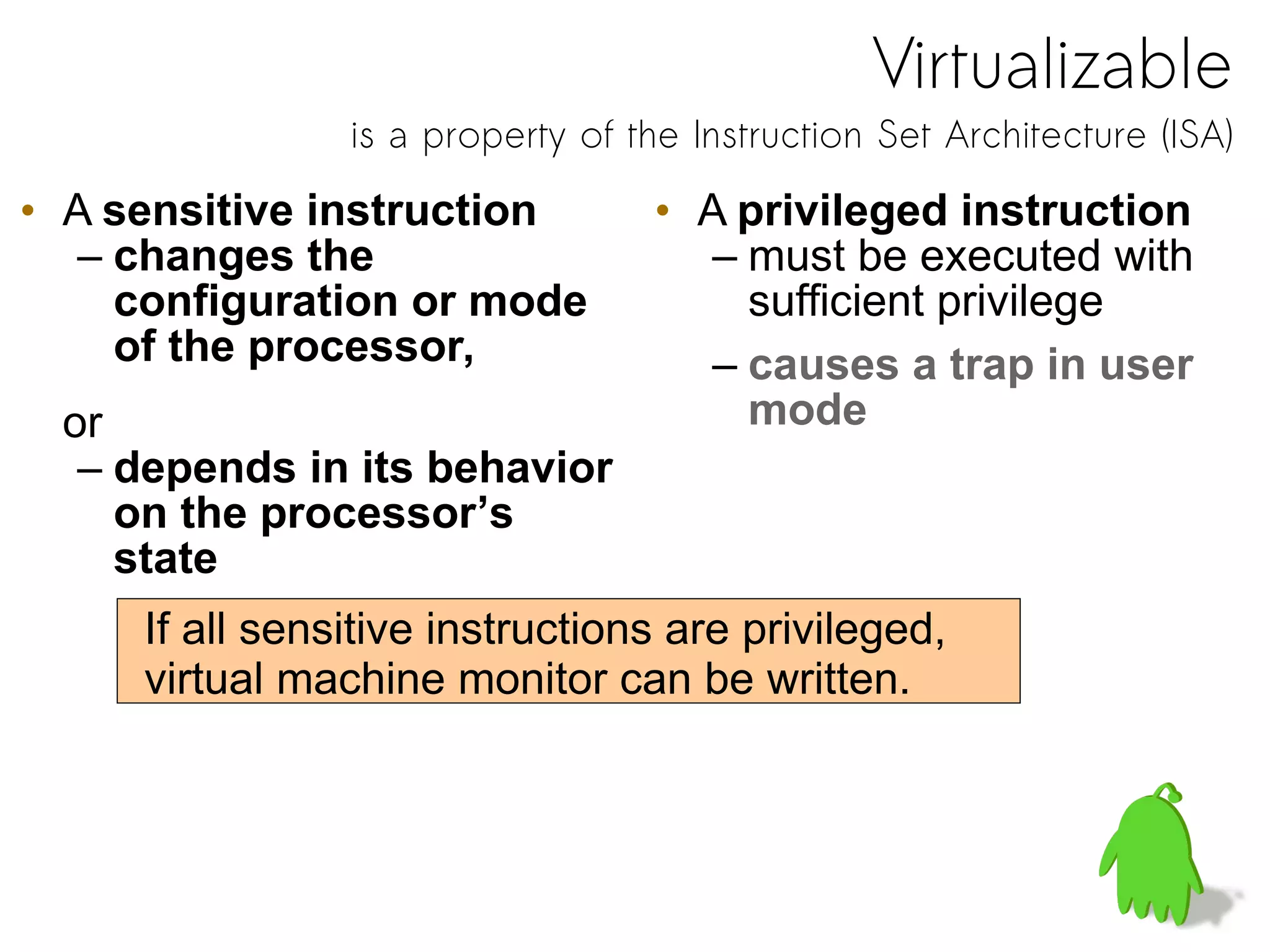
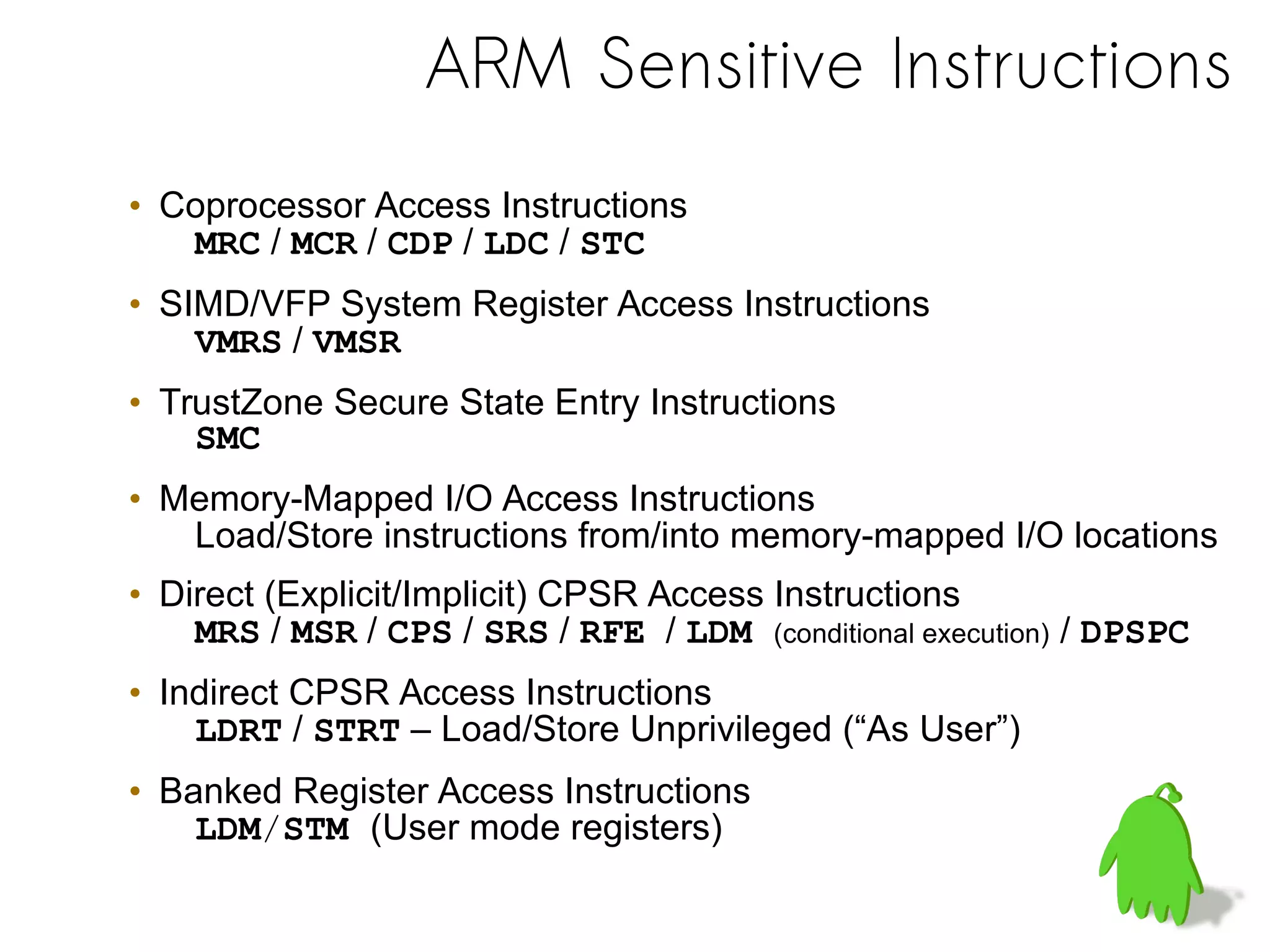
Explains virtualizability as properties of the ISA, focusing on privileged and sensitive instructions.
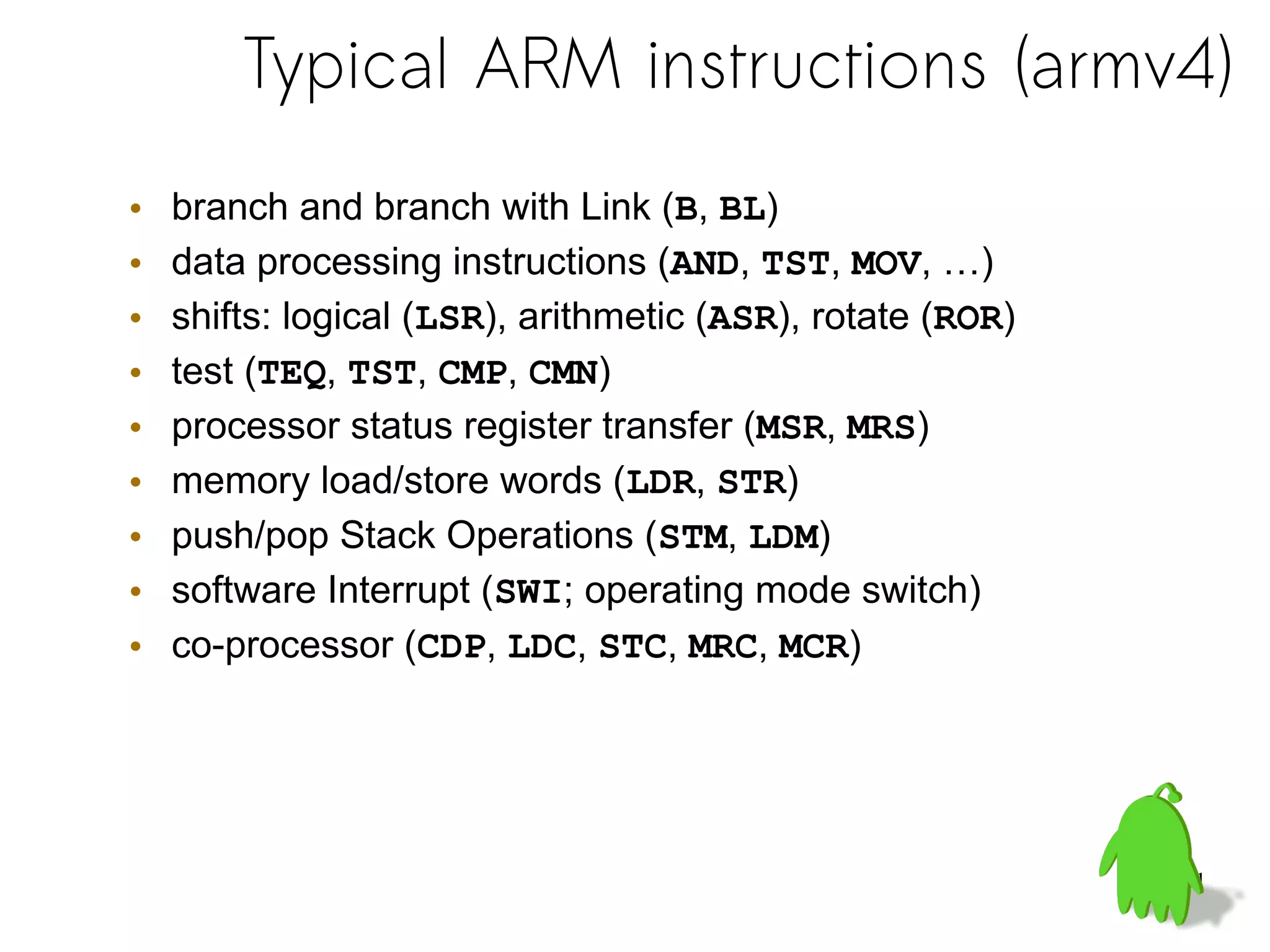
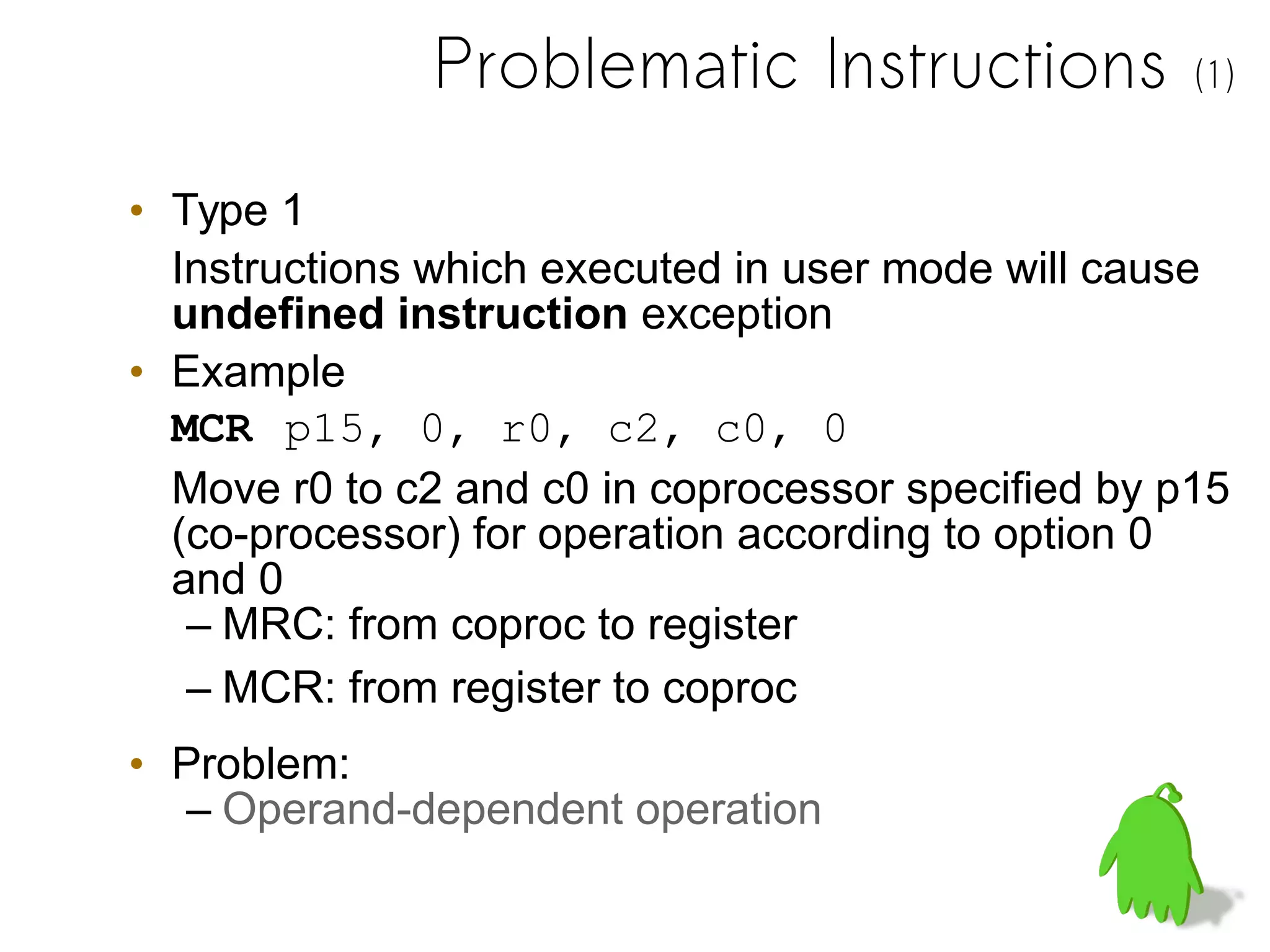
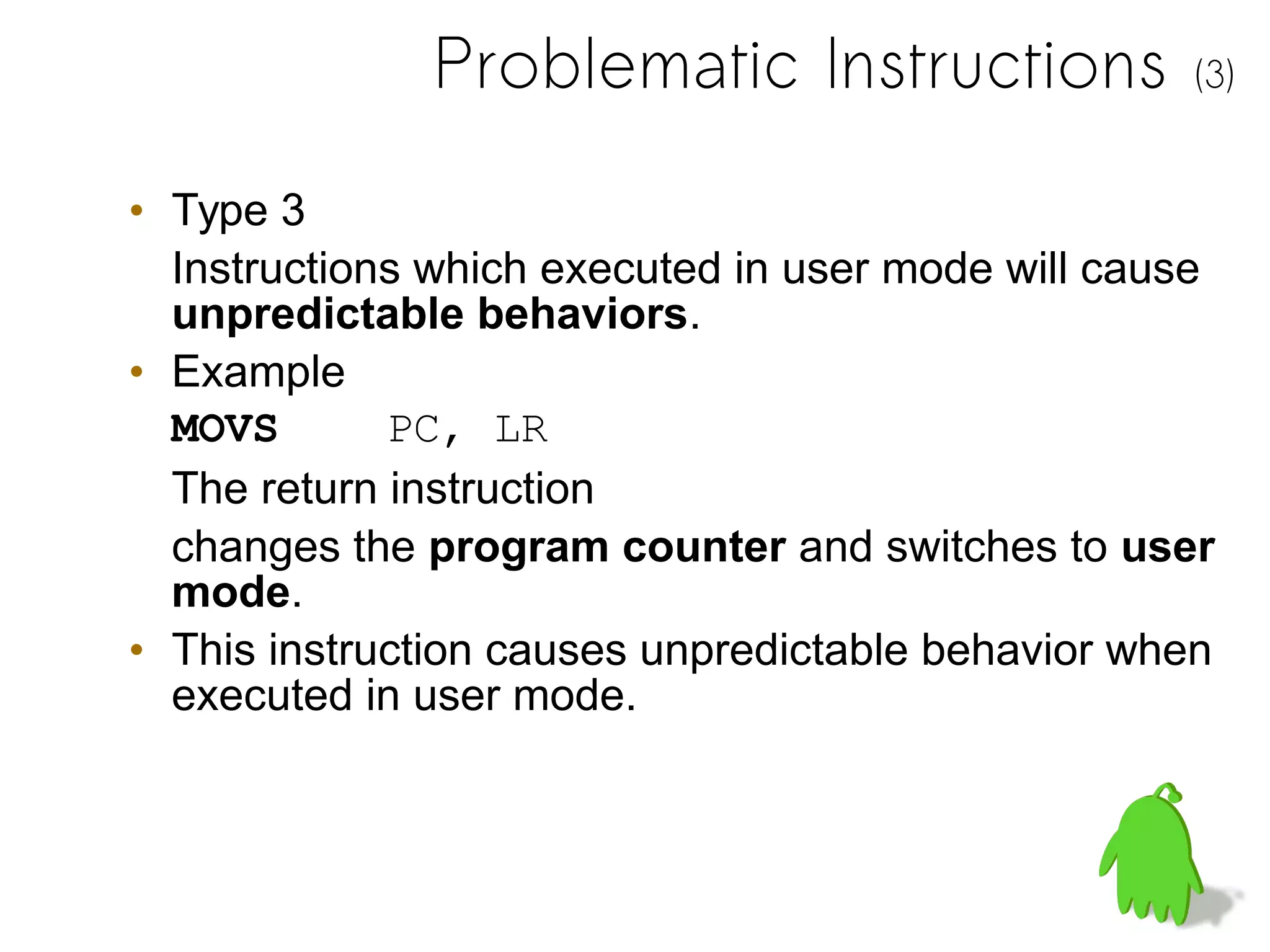
Discusses typical ARM instructions and their behaviors in user mode, highlighting problematic cases.
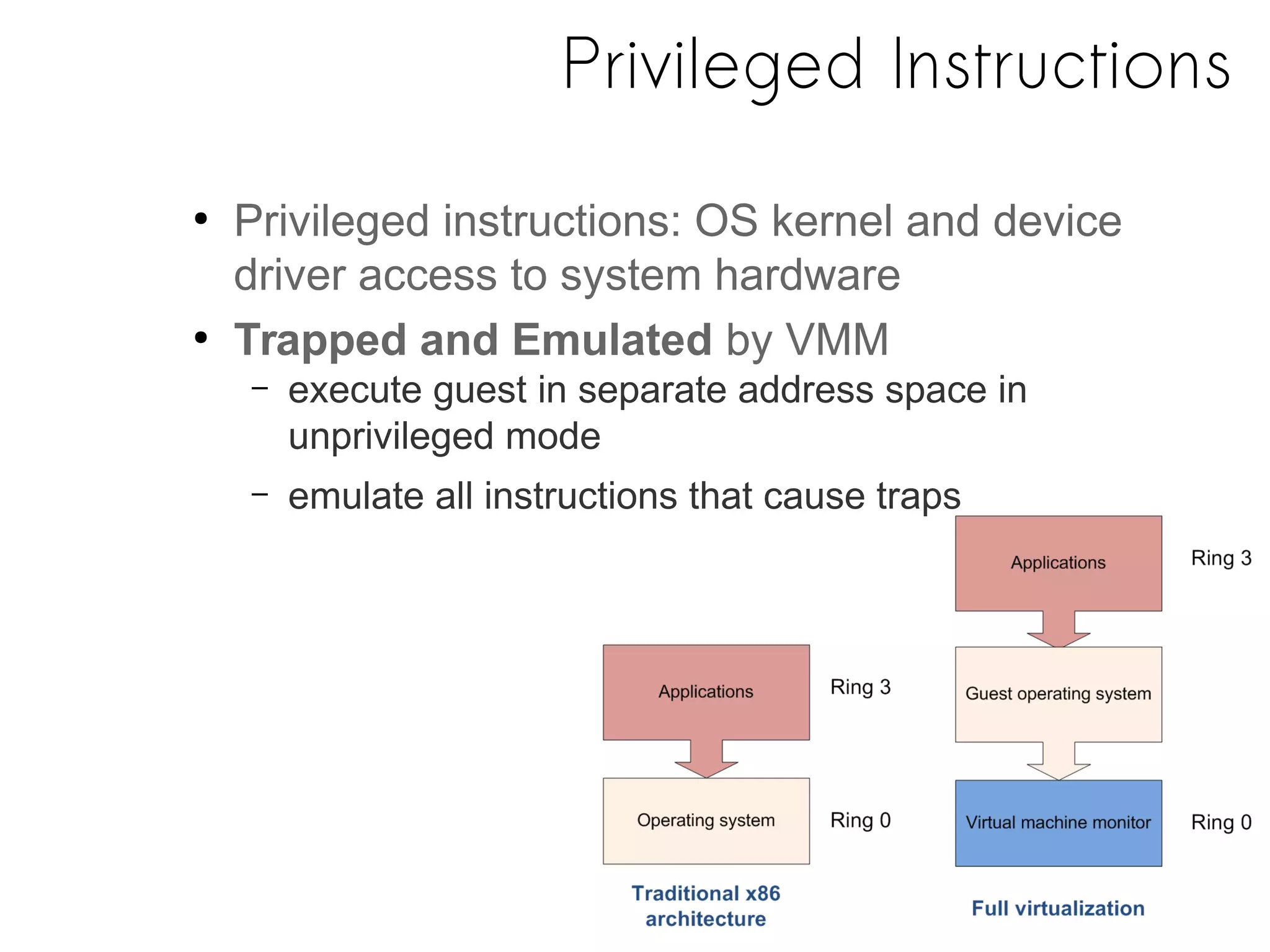
Presents hardware and software techniques to mitigate issues from problematic instructions in virtualization.
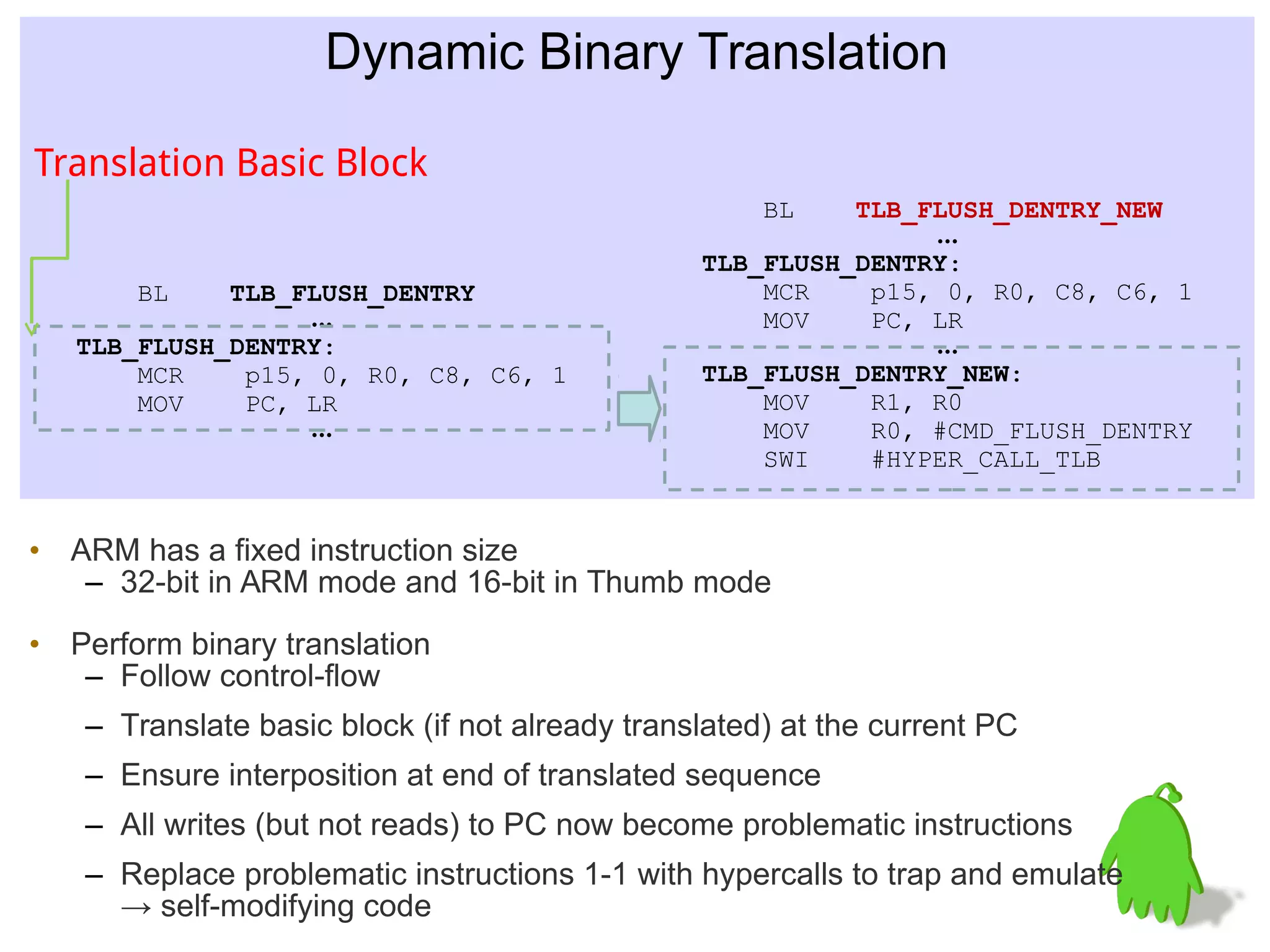
Details the method of dynamic binary translation to manage ARM instruction sizes and emulate behavior.
Explains the use of hypercalls in virtualization for instruction trapping and emulation.
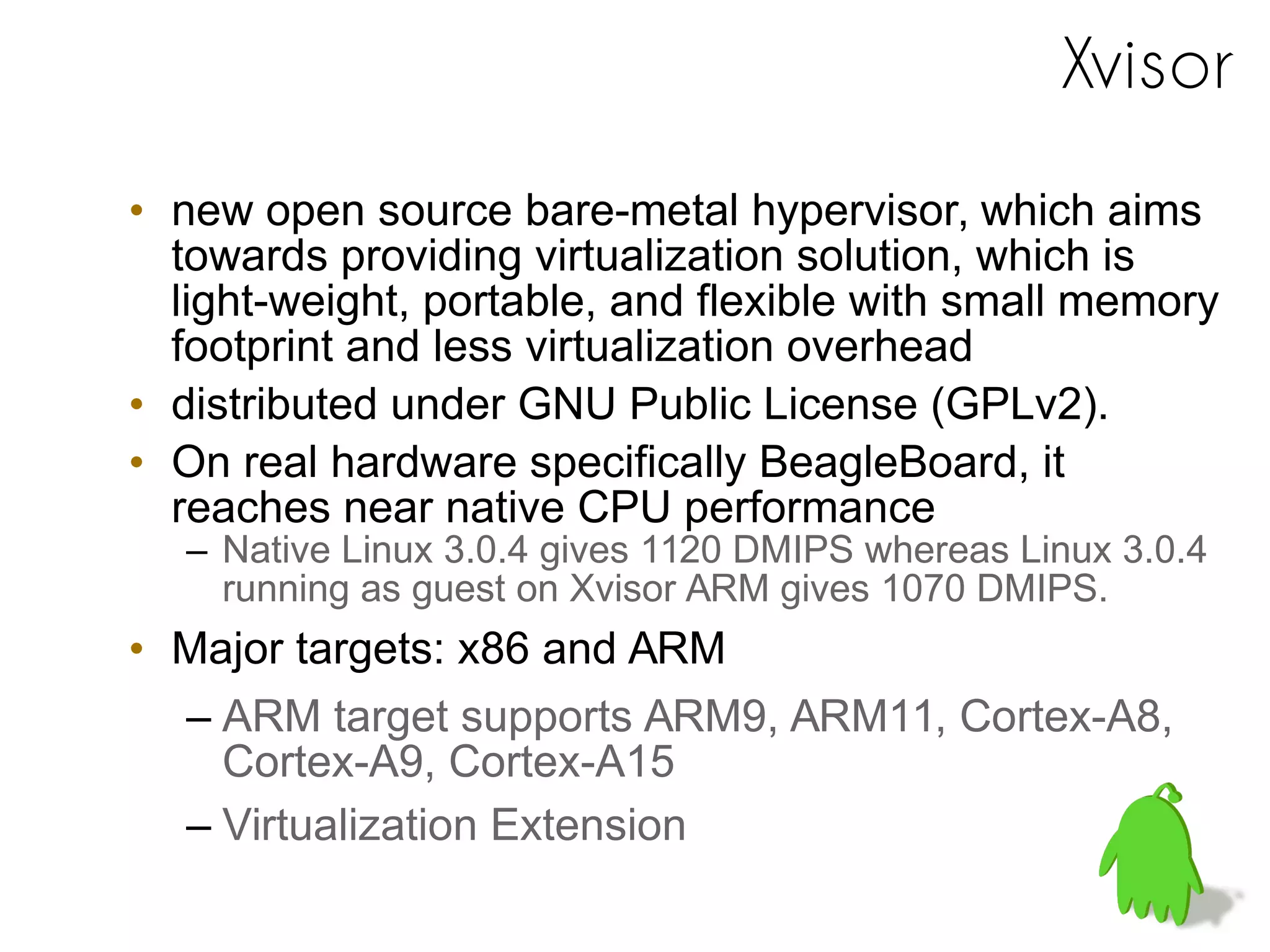
Details Xvisor as a type 1 GPL hypervisor optimized for performance on ARM platforms.
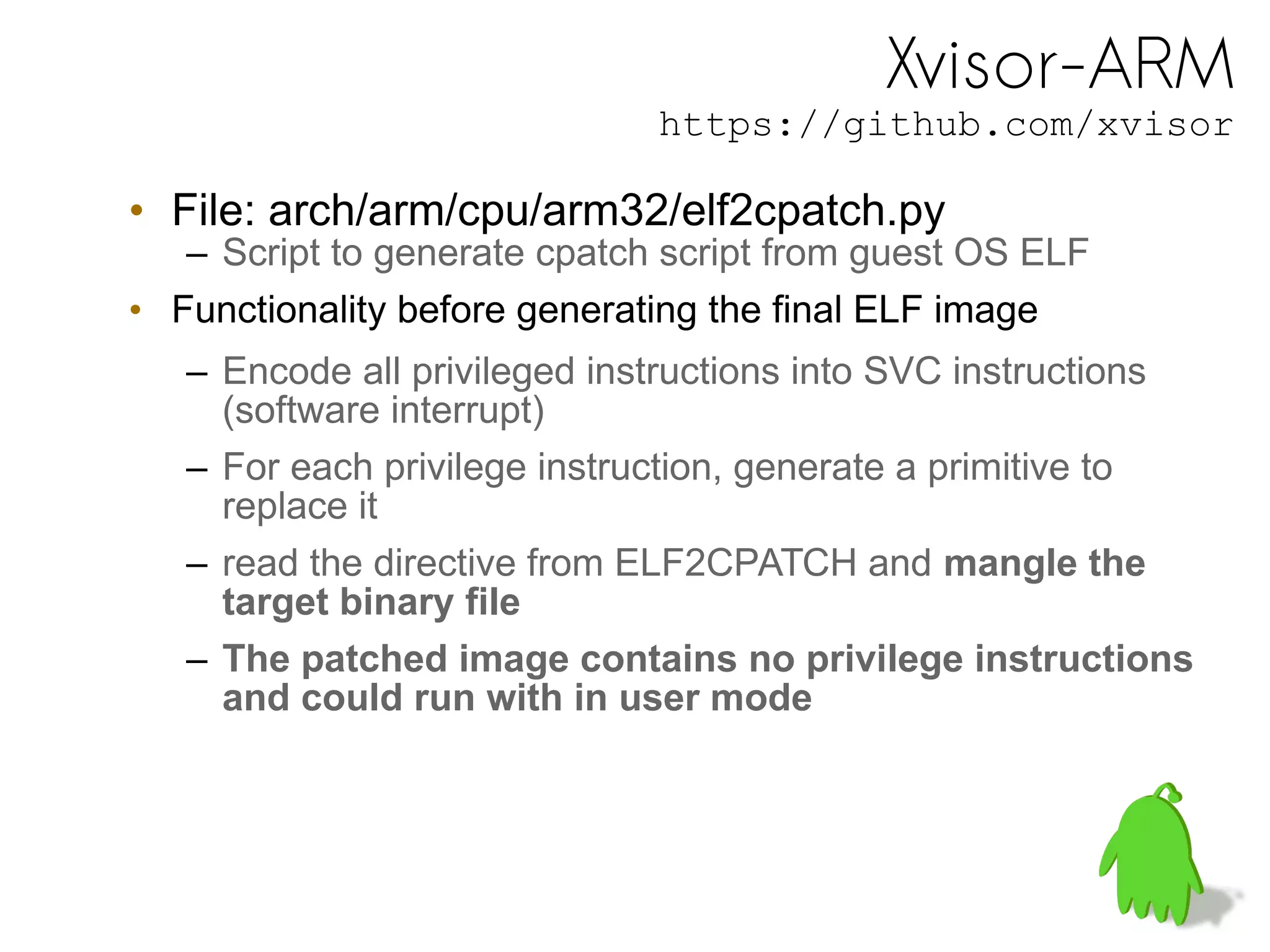
Describes the elf2cpatch tool for transforming privileged instructions in OS binaries for compatibility.
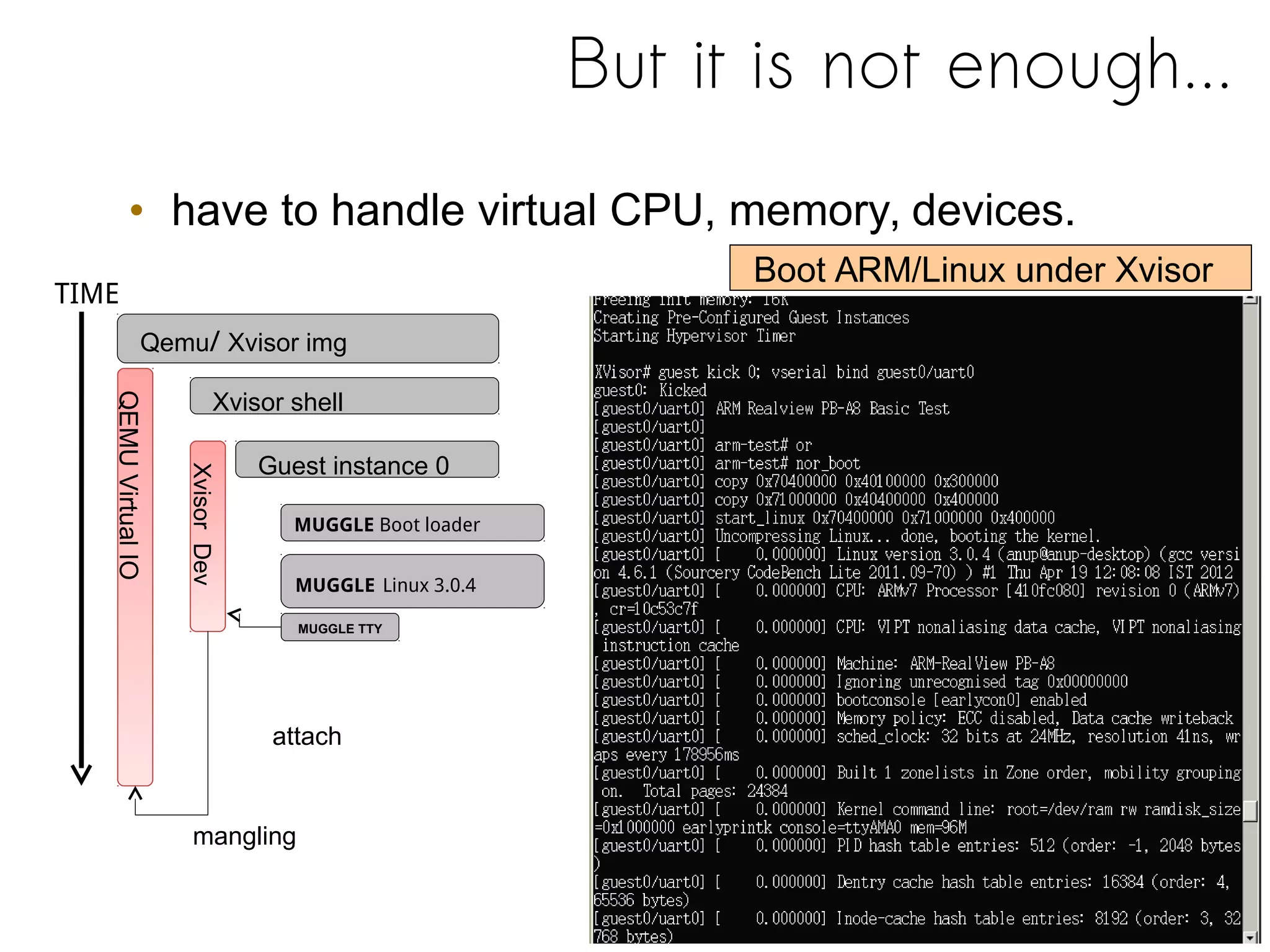
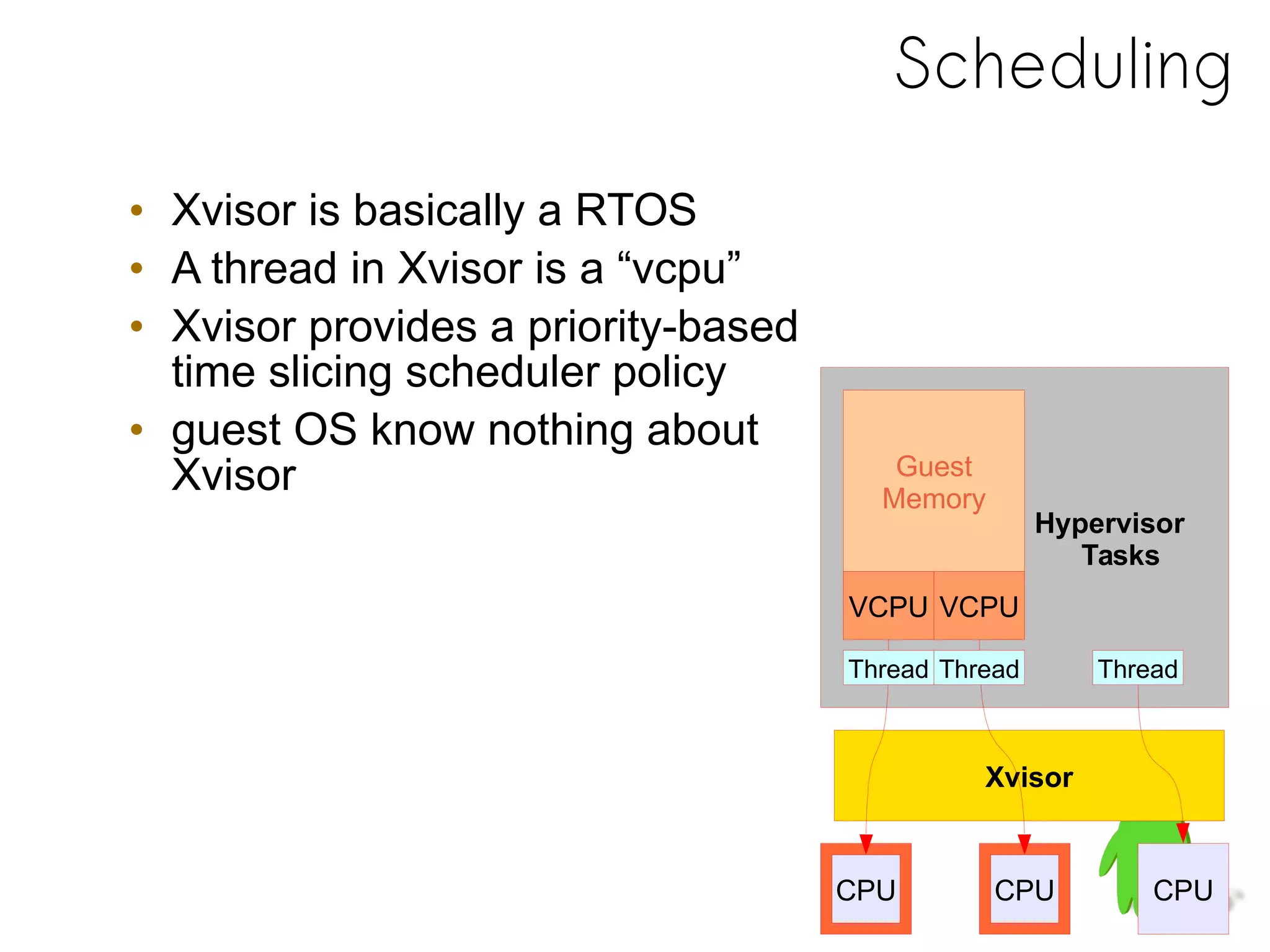
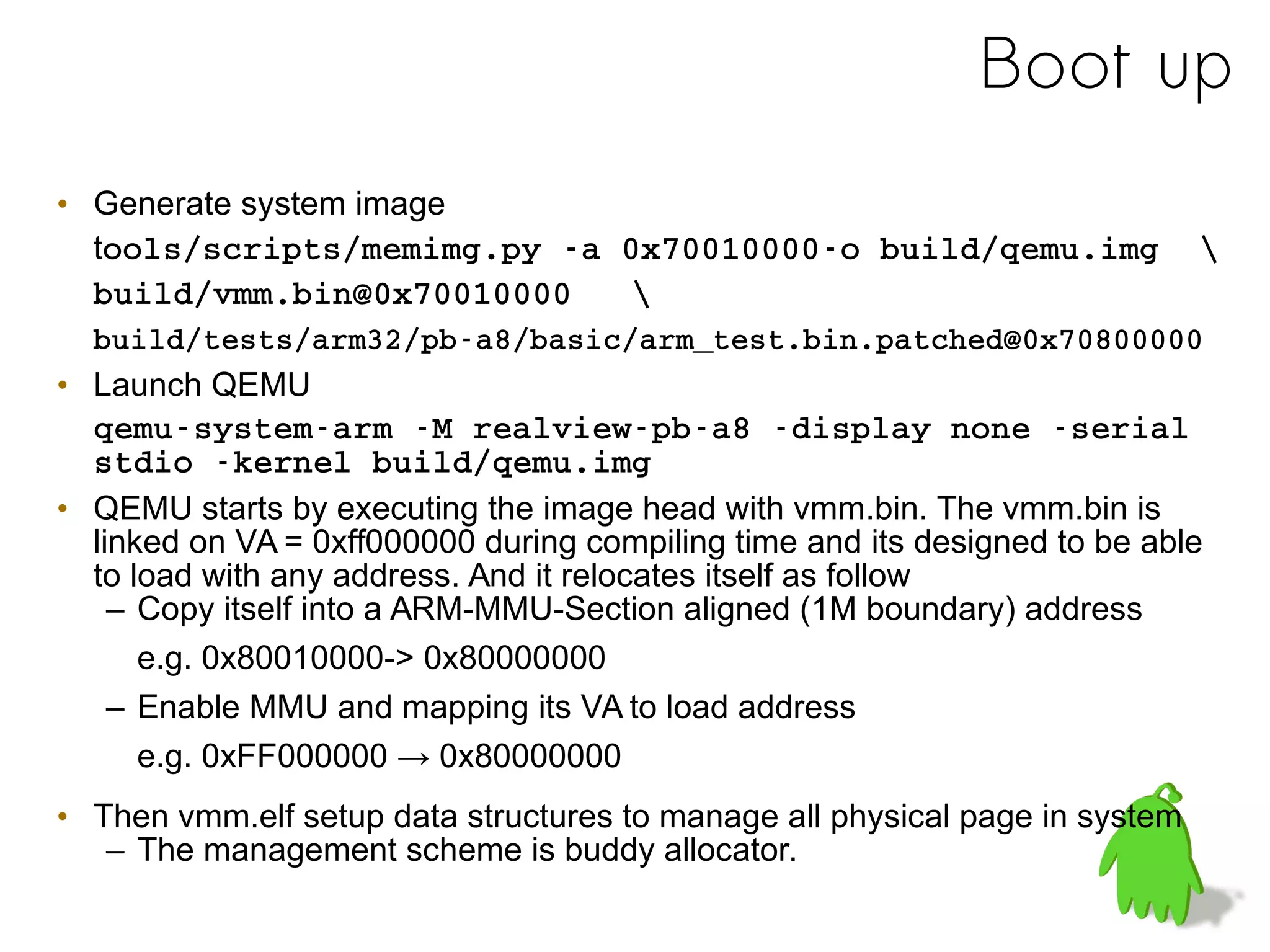
Outlines the booting process under Xvisor, including scheduling and handling virtual CPUs.
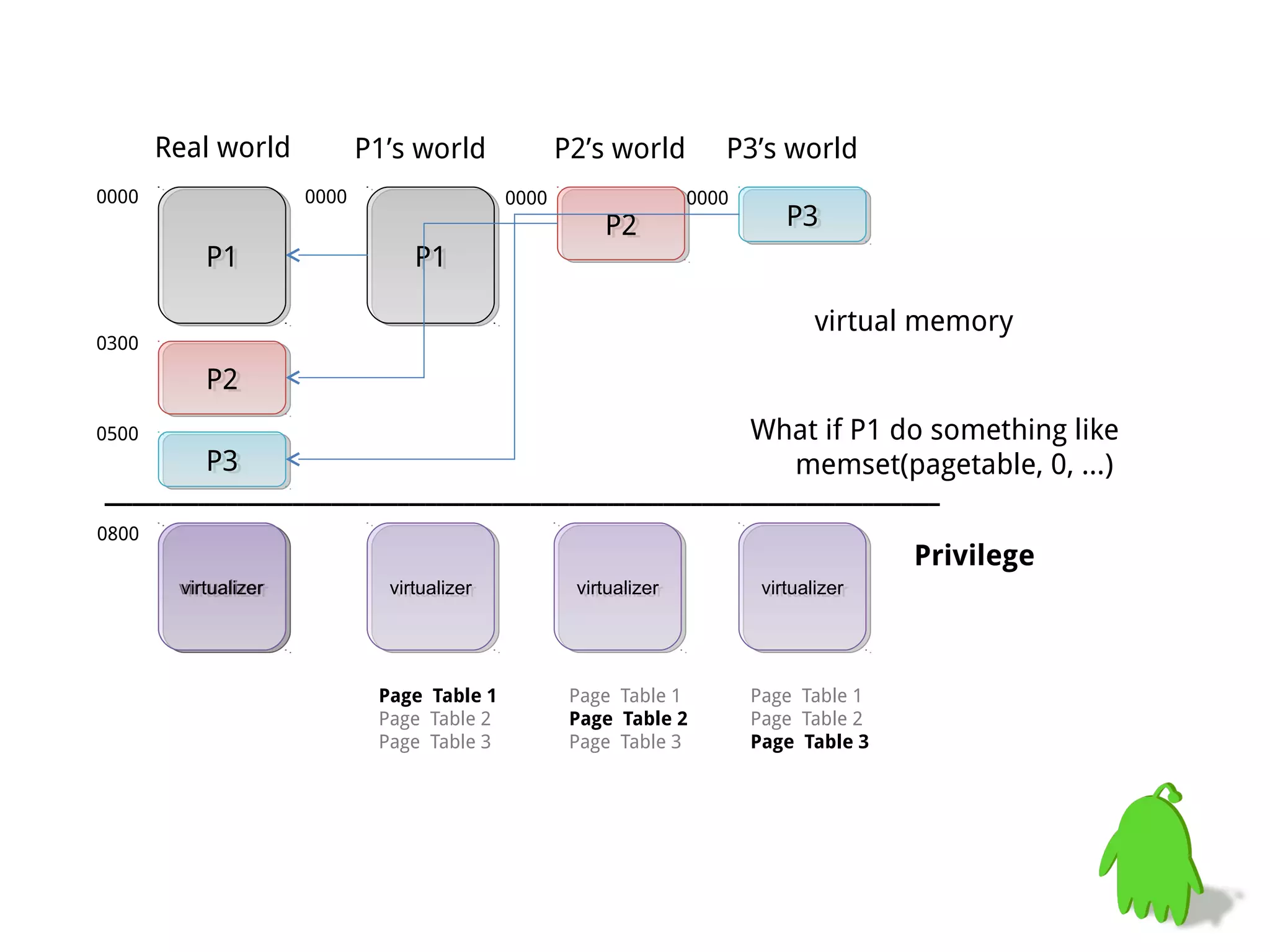
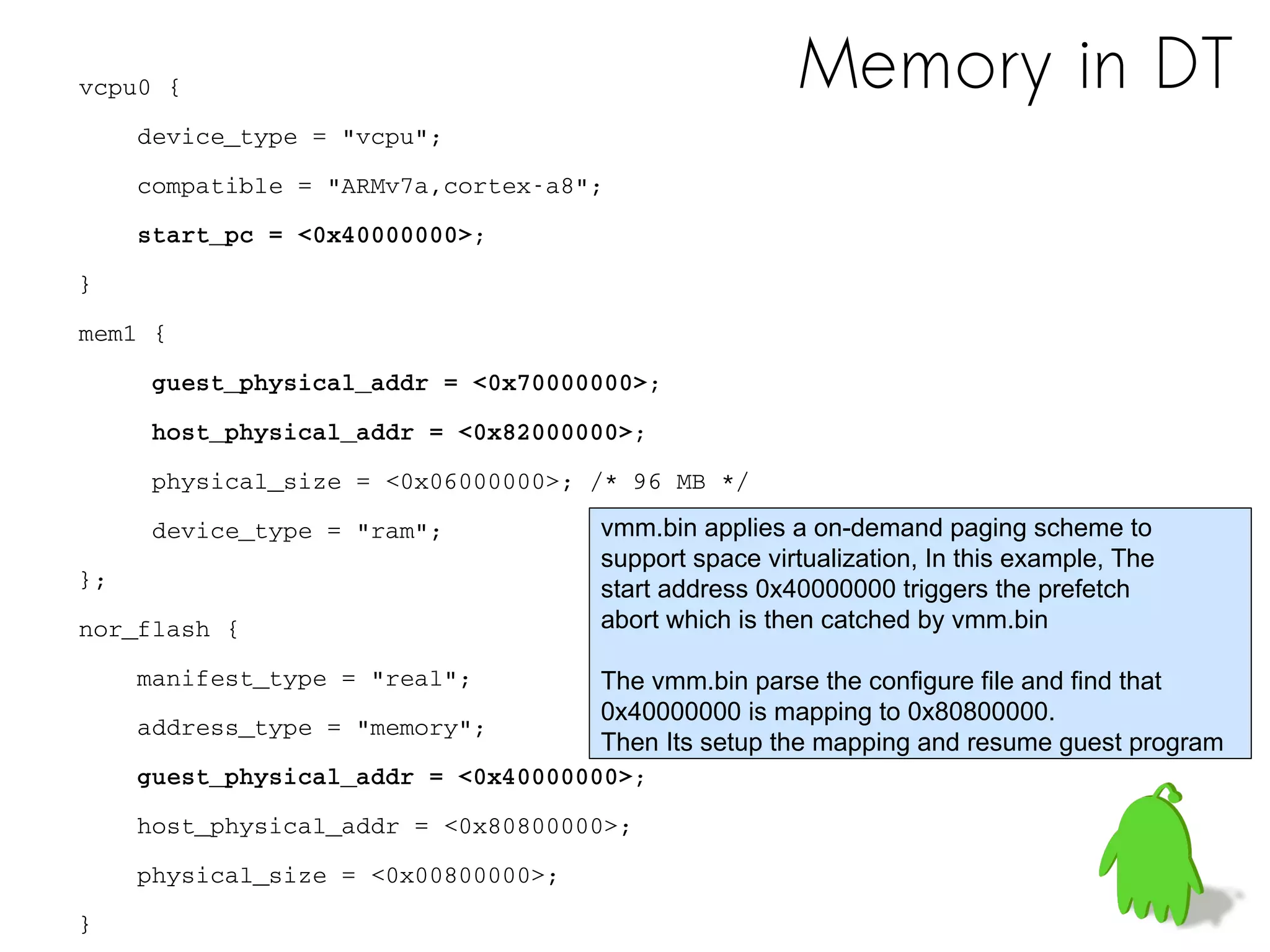
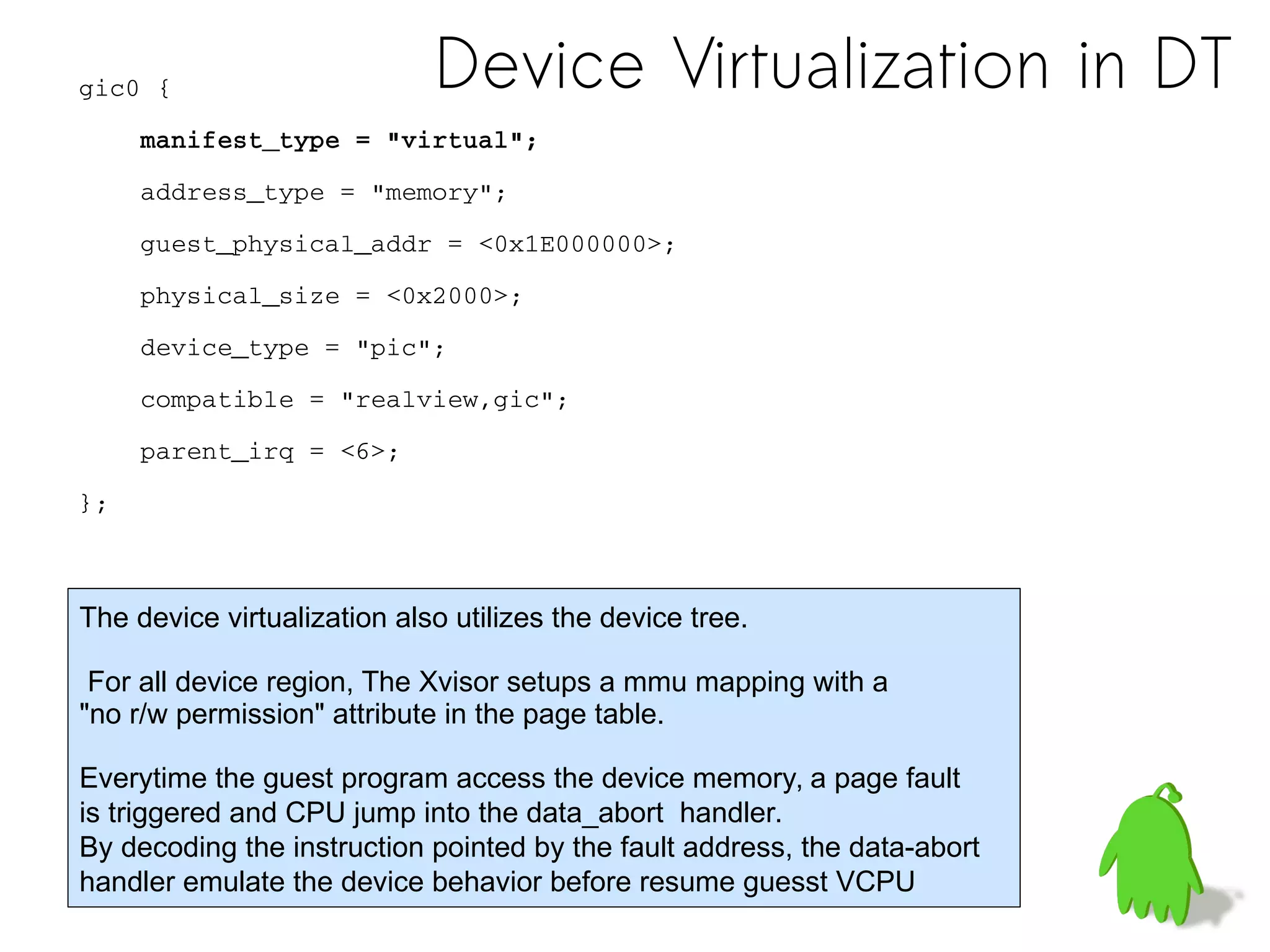
Explains virtual memory management including device trees and on-demand paging schemes with examples.
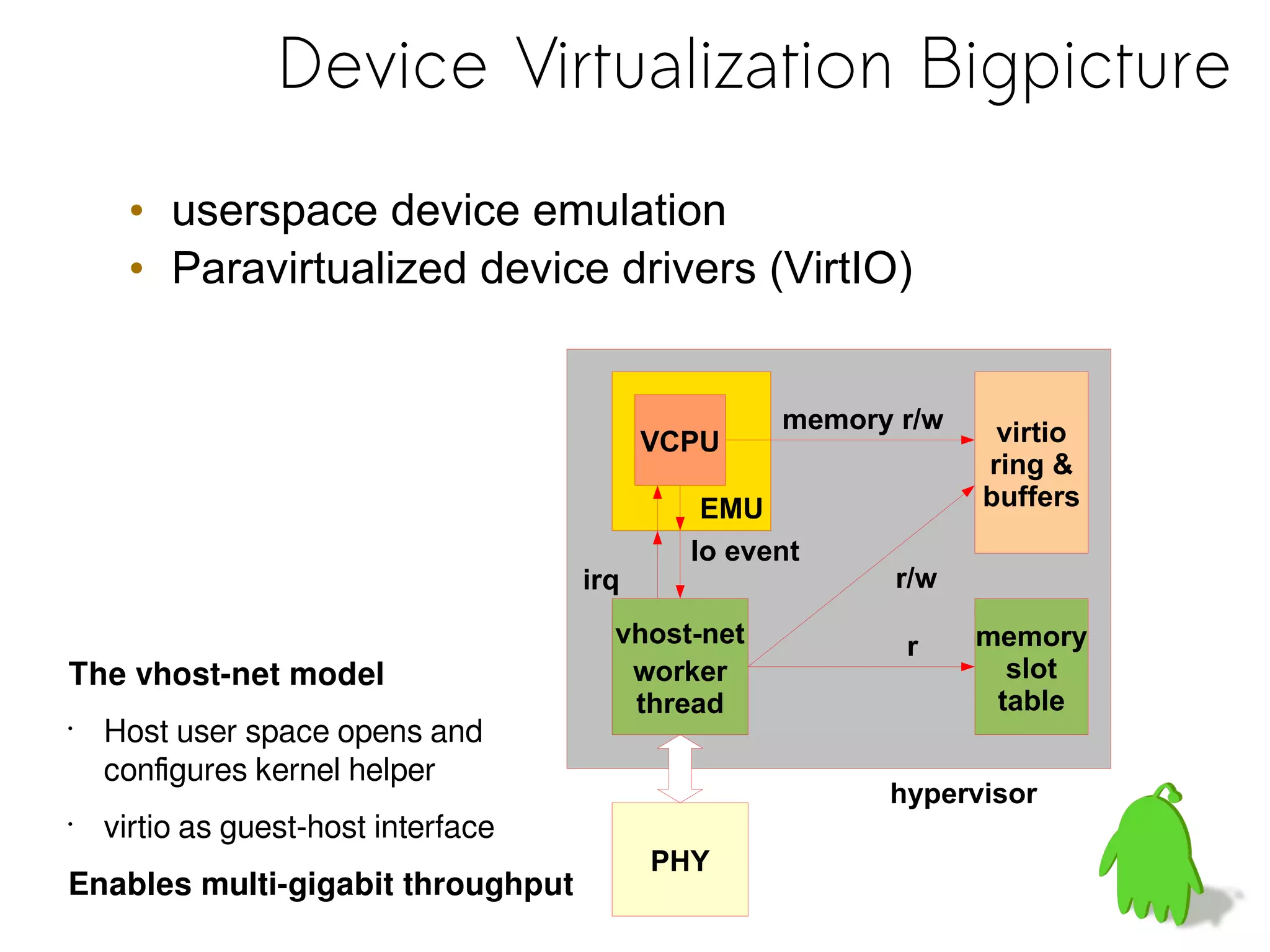
Introduces device virtualization, emphasizing user-space emulation and VirtIO model for performance.
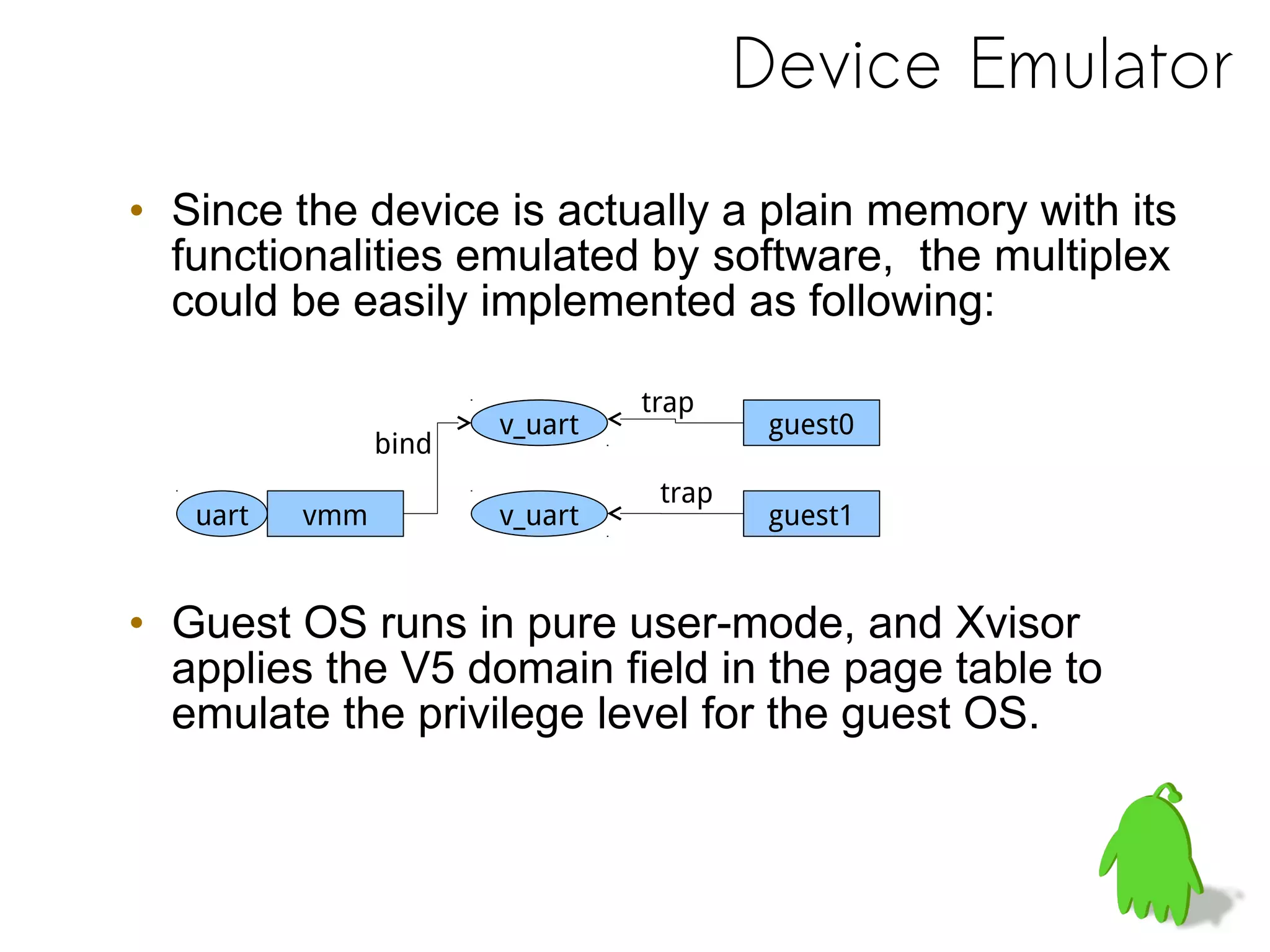
Describes how Xvisor manages device virtualization through memory permission settings and emulation.
Lists references to supporting literature on ARM virtualization and hardware acceleration issues.















































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)













