Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
VJ
Uploaded by
Visual Studio Users Group Japan
860 views
Parallel Technology
今後ますます必要とされるソフトウェアの並列化について、さまざまなソフトウェア開発製品や技術を提供してきたインテルが、今年リリース予定の新しいテクノロジーについてご紹介します。
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Downloaded 29 times
1
/ 60
2
/ 60
3
/ 60
4
/ 60
5
/ 60
6
/ 60
7
/ 60
8
/ 60
9
/ 60
10
/ 60
11
/ 60
12
/ 60
13
/ 60
14
/ 60
15
/ 60
16
/ 60
17
/ 60
18
/ 60
19
/ 60
20
/ 60
21
/ 60
22
/ 60
23
/ 60
24
/ 60
25
/ 60
26
/ 60
27
/ 60
28
/ 60
29
/ 60
30
/ 60
31
/ 60
32
/ 60
33
/ 60
34
/ 60
35
/ 60
36
/ 60
37
/ 60
38
/ 60
39
/ 60
40
/ 60
41
/ 60
42
/ 60
43
/ 60
44
/ 60
45
/ 60
46
/ 60
47
/ 60
48
/ 60
49
/ 60
50
/ 60
51
/ 60
52
/ 60
53
/ 60
54
/ 60
55
/ 60
56
/ 60
57
/ 60
58
/ 60
59
/ 60
60
/ 60
More Related Content
PDF
CMSI計算科学技術特論B(15) インテル Xeon Phi コプロセッサー向け最適化、並列化概要 1
by
Computational Materials Science Initiative
PDF
CMSI計算科学技術特論B(15) インテル Xeon Phi コプロセッサー向け最適化、並列化概要 2
by
Computational Materials Science Initiative
PDF
Androidテスティング実践3 ユニットテスト・CI編
by
株式会社 NTTテクノクロス
PDF
Lpicl304セミナー資料20140727
by
Takahiro Kujirai
PDF
Lpicl304Seminar Presentations on 20150118
by
Takahiro Kujirai
PDF
WebRTC研修
by
株式会社 NTTテクノクロス
PDF
明示的アニメで、Flutterアニメーション入門
by
cch-robo
PPTX
20151114 _html5無料セミナー(OSC2015徳島)
by
Takahiro Kujirai
CMSI計算科学技術特論B(15) インテル Xeon Phi コプロセッサー向け最適化、並列化概要 1
by
Computational Materials Science Initiative
CMSI計算科学技術特論B(15) インテル Xeon Phi コプロセッサー向け最適化、並列化概要 2
by
Computational Materials Science Initiative
Androidテスティング実践3 ユニットテスト・CI編
by
株式会社 NTTテクノクロス
Lpicl304セミナー資料20140727
by
Takahiro Kujirai
Lpicl304Seminar Presentations on 20150118
by
Takahiro Kujirai
WebRTC研修
by
株式会社 NTTテクノクロス
明示的アニメで、Flutterアニメーション入門
by
cch-robo
20151114 _html5無料セミナー(OSC2015徳島)
by
Takahiro Kujirai
What's hot
PDF
はじめてのMercurial/Bitbucket
by
kenjis
PPTX
ngCore engine for mobage platform
by
Toru Yamaguchi
PPT
Android™組込み開発基礎コース BeagleBoard編
by
OESF Education
PDF
基礎から学ぶ組み込みAndroid
by
demuyan
PPTX
エンジニアという職業について
by
Hisatoshi Kikumoto
PDF
Lightweight Language Diverプレゼン資料:アプリケーションのIPv6対応のススメ(LL編)
by
v6app
PPTX
20160619_LPICl304 技術解説セミナー in AP浜松町
by
Takahiro Kujirai
PDF
Androidアプリケーション開発中級研修 後編
by
株式会社 NTTテクノクロス
はじめてのMercurial/Bitbucket
by
kenjis
ngCore engine for mobage platform
by
Toru Yamaguchi
Android™組込み開発基礎コース BeagleBoard編
by
OESF Education
基礎から学ぶ組み込みAndroid
by
demuyan
エンジニアという職業について
by
Hisatoshi Kikumoto
Lightweight Language Diverプレゼン資料:アプリケーションのIPv6対応のススメ(LL編)
by
v6app
20160619_LPICl304 技術解説セミナー in AP浜松町
by
Takahiro Kujirai
Androidアプリケーション開発中級研修 後編
by
株式会社 NTTテクノクロス
Viewers also liked
PDF
Vsugアーキテクトアカデミー設立のご挨拶
by
Visual Studio Users Group Japan
PDF
OpenStackベースのハイブリッド・クラウドで変わるITの姿
by
Shinichiro Arai
PDF
Vsug architect academy_sakakibara_20101016
by
Visual Studio Users Group Japan
PDF
Windows Azure Programming
by
Visual Studio Users Group Japan
PPTX
Vsug2011 lt
by
Visual Studio Users Group Japan
PPTX
さようなら、オートシェイプ
by
Visual Studio Users Group Japan
PDF
Dynamic Data
by
Visual Studio Users Group Japan
PPT
Vsugday ichigan
by
Visual Studio Users Group Japan
PPTX
VSUG DAY_ ICHIGAN
by
Visual Studio Users Group Japan
Vsugアーキテクトアカデミー設立のご挨拶
by
Visual Studio Users Group Japan
OpenStackベースのハイブリッド・クラウドで変わるITの姿
by
Shinichiro Arai
Vsug architect academy_sakakibara_20101016
by
Visual Studio Users Group Japan
Windows Azure Programming
by
Visual Studio Users Group Japan
Vsug2011 lt
by
Visual Studio Users Group Japan
さようなら、オートシェイプ
by
Visual Studio Users Group Japan
Dynamic Data
by
Visual Studio Users Group Japan
Vsugday ichigan
by
Visual Studio Users Group Japan
VSUG DAY_ ICHIGAN
by
Visual Studio Users Group Japan
Similar to Parallel Technology
PDF
エバンジェリストが語るパワーシステム特論 ~ 第3回:IBMオフコンはいかにして生き残れたのか?~第二章~
by
Takumi Kurosawa
PDF
第15回「インテル® Xeon® プロセッサー E5 ファミリー 新登場!」(2012/03/22 on しすなま!) Iintel様資料
by
System x 部 (生!) : しすなま! @ Lenovo Enterprise Solutions Ltd.
PDF
FPGAを用いたEdge AIの現状
by
Yukitaka Takemura
PDF
仮想化技術によるマルウェア対策とその問題点
by
Kuniyasu Suzaki
PDF
MPIによる並列計算
by
HPCシステムズ株式会社
PDF
【Cisco Data Center Forum 2014】 Cisco UCS の今後の方向性と新製品 Cisco UCS Invicta、および新サー...
by
シスコシステムズ合同会社
PDF
X86opti01 nothingcosmos
by
nothingcosmos
PDF
Solaris 11におけるシステム、ネットワーク、ストレージの仮想化機能
by
SolarisJP
PDF
第11回ACRiウェビナー_インテル/竹村様ご講演資料
by
直久 住川
PDF
Adaptive optimization of JIT compiler
by
nothingcosmos
PDF
【QCon】 Get Clean, Stay Clean 価値を向上し続けるための秘訣 #QConTokyo
by
智治 長沢
PDF
Jenkins ユーザ・カンファレンス 2012 東京 S406-4/マルチステージ型継続的インテグレーションのすすめ
by
atsushi_tmx
PDF
Microsoft Developer Forum 2011 KeyNote by Akihiro Ooba
by
junichi anno
PDF
Visual Studio 2010
by
Visual Studio Users Group Japan
PDF
増加するコアを使い切れ!!
by
guestc06e54
PDF
CLRの基礎 - プログラミング .NET Framework 第3版 読書会
by
Yoshihisa Ozaki
PDF
OpenJDK HotSpot C1Compiler Overview
by
nothingcosmos
PDF
インテルが考える次世代ファブリック
by
Naoto MATSUMOTO
PPTX
Windows Server 2012 で管理をもっと自動化する
by
junichi anno
PPTX
20200709 fjt7tdmi-blog-appendix
by
Akifumi Fujita
エバンジェリストが語るパワーシステム特論 ~ 第3回:IBMオフコンはいかにして生き残れたのか?~第二章~
by
Takumi Kurosawa
第15回「インテル® Xeon® プロセッサー E5 ファミリー 新登場!」(2012/03/22 on しすなま!) Iintel様資料
by
System x 部 (生!) : しすなま! @ Lenovo Enterprise Solutions Ltd.
FPGAを用いたEdge AIの現状
by
Yukitaka Takemura
仮想化技術によるマルウェア対策とその問題点
by
Kuniyasu Suzaki
MPIによる並列計算
by
HPCシステムズ株式会社
【Cisco Data Center Forum 2014】 Cisco UCS の今後の方向性と新製品 Cisco UCS Invicta、および新サー...
by
シスコシステムズ合同会社
X86opti01 nothingcosmos
by
nothingcosmos
Solaris 11におけるシステム、ネットワーク、ストレージの仮想化機能
by
SolarisJP
第11回ACRiウェビナー_インテル/竹村様ご講演資料
by
直久 住川
Adaptive optimization of JIT compiler
by
nothingcosmos
【QCon】 Get Clean, Stay Clean 価値を向上し続けるための秘訣 #QConTokyo
by
智治 長沢
Jenkins ユーザ・カンファレンス 2012 東京 S406-4/マルチステージ型継続的インテグレーションのすすめ
by
atsushi_tmx
Microsoft Developer Forum 2011 KeyNote by Akihiro Ooba
by
junichi anno
Visual Studio 2010
by
Visual Studio Users Group Japan
増加するコアを使い切れ!!
by
guestc06e54
CLRの基礎 - プログラミング .NET Framework 第3版 読書会
by
Yoshihisa Ozaki
OpenJDK HotSpot C1Compiler Overview
by
nothingcosmos
インテルが考える次世代ファブリック
by
Naoto MATSUMOTO
Windows Server 2012 で管理をもっと自動化する
by
junichi anno
20200709 fjt7tdmi-blog-appendix
by
Akifumi Fujita
Parallel Technology
1.
並列化のロードマップ: 今後のインテルソフトウェア開発製品について 池井 満 ソフトウェア&サービス統括本部部長 インテル株式会社
Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
2.
Legal Disclaimer INFORMATION IN
THIS DOCUMENT IS PROVIDED “AS IS”. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. INTEL ASSUMES NO LIABILITY WHATSOEVER AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO THIS INFORMATION INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. Performance tests and ratings are measured using specific computer systems and/or components and reflect the approximate performance of Intel products as measured by those tests. Any difference in system hardware or software design or configuration may affect actual performance. Buyers should consult other sources of information to evaluate the performance of systems or components they are considering purchasing. For more information on performance tests and on the performance of Intel products, reference www.intel.com/software/products. Intel, Intel Core and the Intel logo are trademarks of Intel Corporation in the U.S. and other countries. *Other names and brands may be claimed as the property of others. Copyright © 2009. Intel Corporation. http://intel.com/software/products Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 2
3.
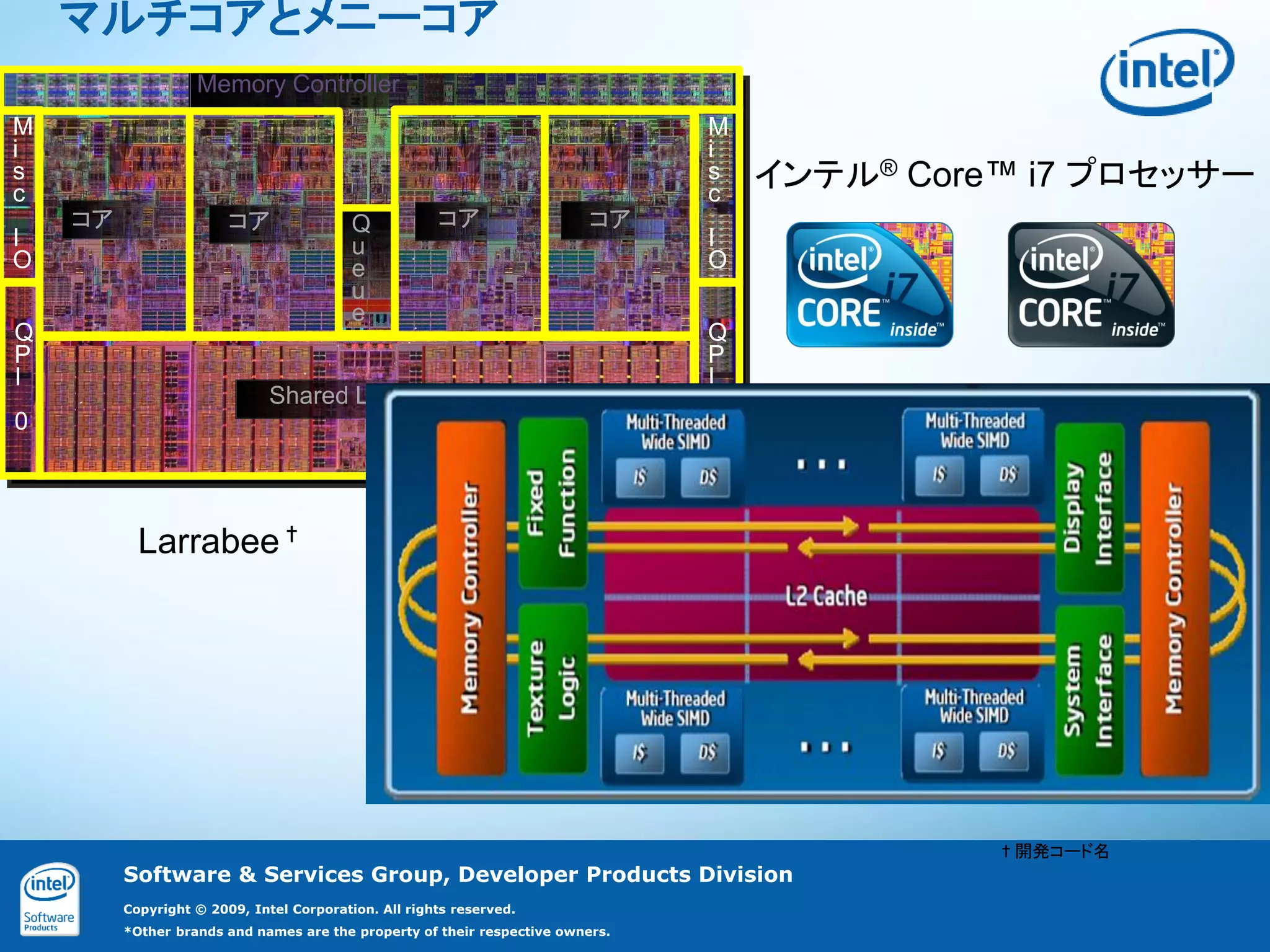
マルチコアとメニーコア
Memory Controller M M i i s c s c インテル® Core™ i7 プロセッサー コア コア Q コア コア I u I O e O u e Q Q P P I I Shared L3 Cache 0 1 Larrabee✝ ✝開発コード名 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
4.
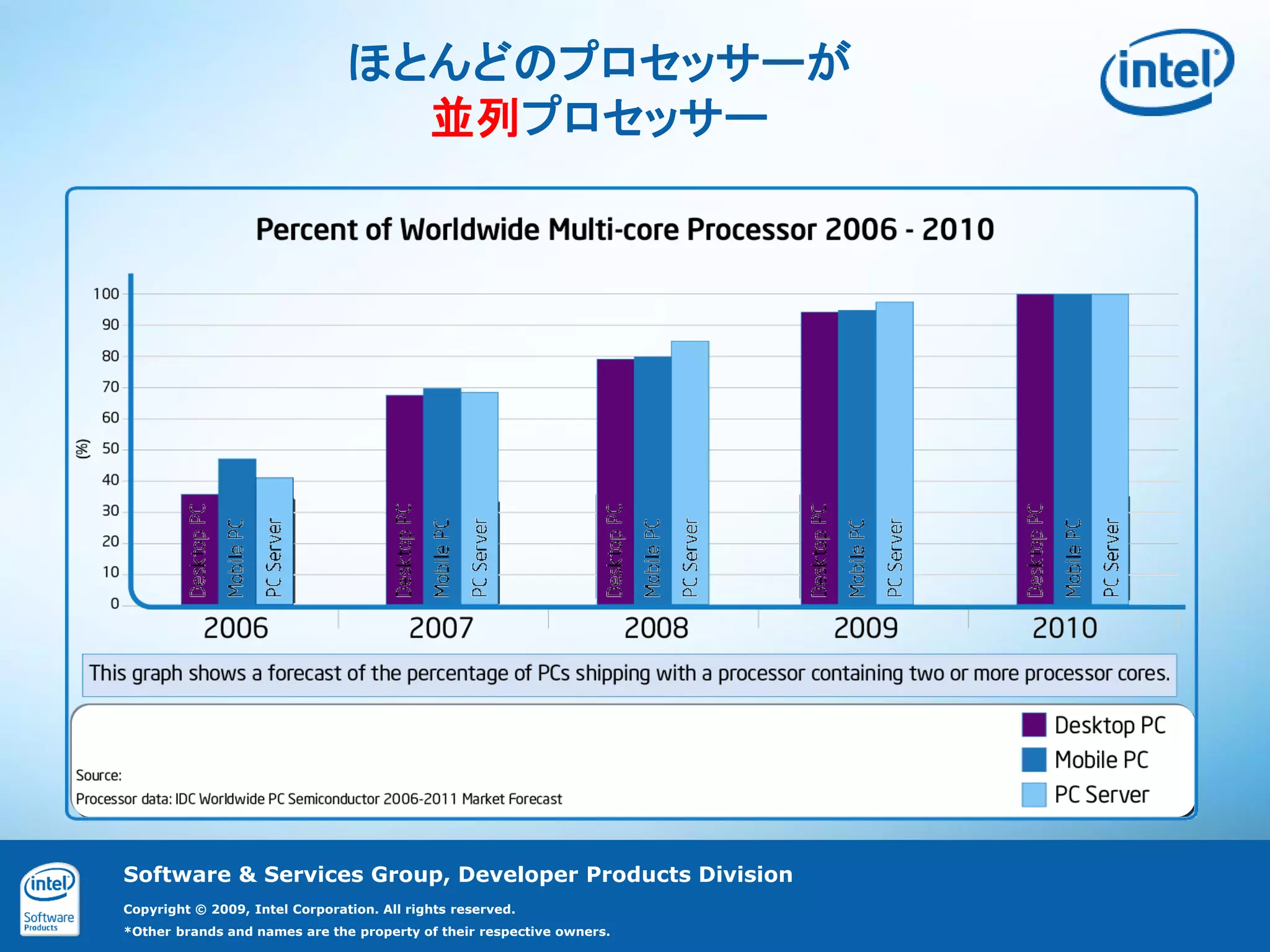
ほとんどのプロセッサーが
並列プロセッサー Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
5.
ソフトウェア開発部門へのインパクト
マルチコアのプロセッサは膨大な性能向上を提供できる マルチコアに対応していないアプリケーションは新しいプロセッサが登場しても速くならない。実際は遅くな るかもしれない! • マルチスレッド化は難しく、時間がかかり、バグを作りやすい • マルチスレッド化しただけではコア数に応じて性能が向上する アプリケーションは得られない • マルチスレッド化ではシングルコアで利用可能な並列性を利用 できない • 現在のマルチコア用の方法ではアクセラレータには適用できな い • 各バーティカルのアプリケーションはそれぞれデータマネージメ ントやプロセッサ特有の開発に固有のチャレンジがある Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. September *Other brands and names are the property of their respective owners. 18, 2007 Copyright © 2007, RapidMind, Inc.
6.
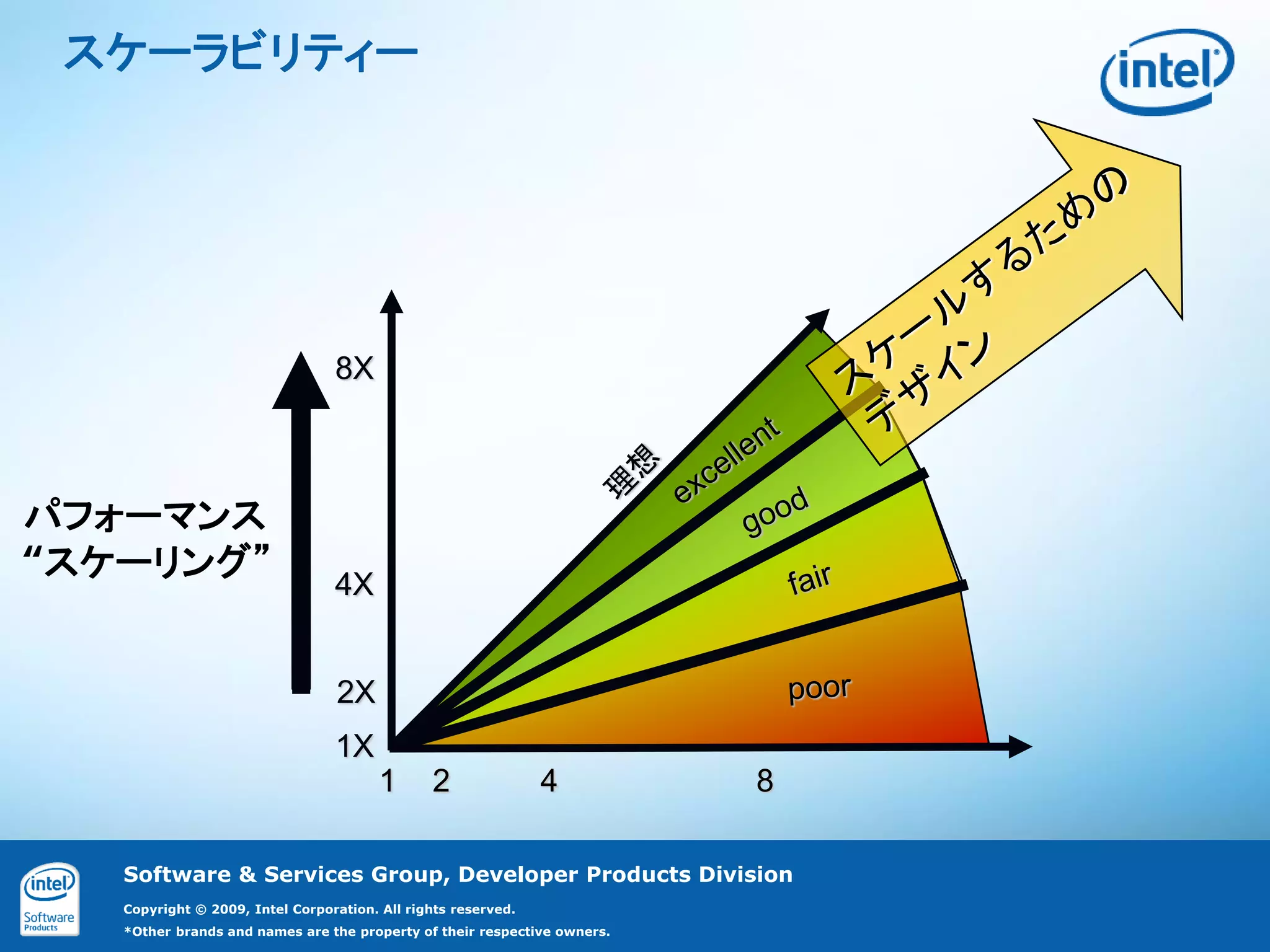
スケーラビリティー
8X パフォーマンス “スケーリング” 4X 2X 1X 1 2 4 8 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
7.
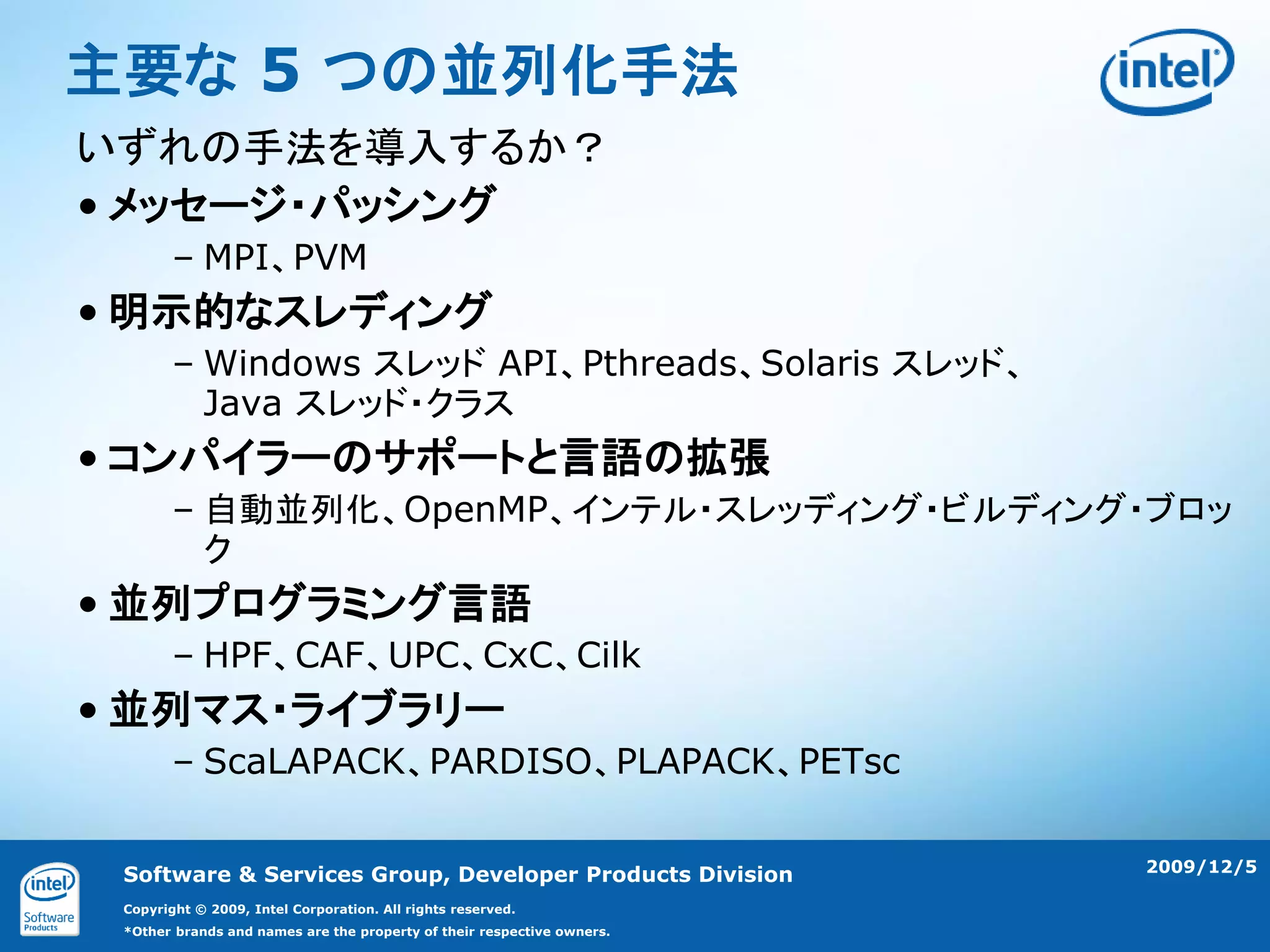
主要な 5 つの並列化手法 いずれの手法を導入するか? •
メッセージ・パッシング – MPI、PVM • 明示的なスレディング – Windows スレッド API、Pthreads、Solaris スレッド、 Java スレッド・クラス • コンパイラーのサポートと言語の拡張 – 自動並列化、OpenMP、インテル・スレッディング・ビルディング・ブロッ ク • 並列プログラミング言語 – HPF、CAF、UPC、CxC、Cilk • 並列マス・ライブラリー – ScaLAPACK、PARDISO、PLAPACK、PETsc 2009/12/5 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
8.
インテルの HPC ツール インテル®
コンパイラー 11.1 日本語版をリリースしました Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
9.
インテル® Parallel Studio •
Windows* クライアント・アプリケーション開発者の 並列化プログラミングをサポート Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
10.
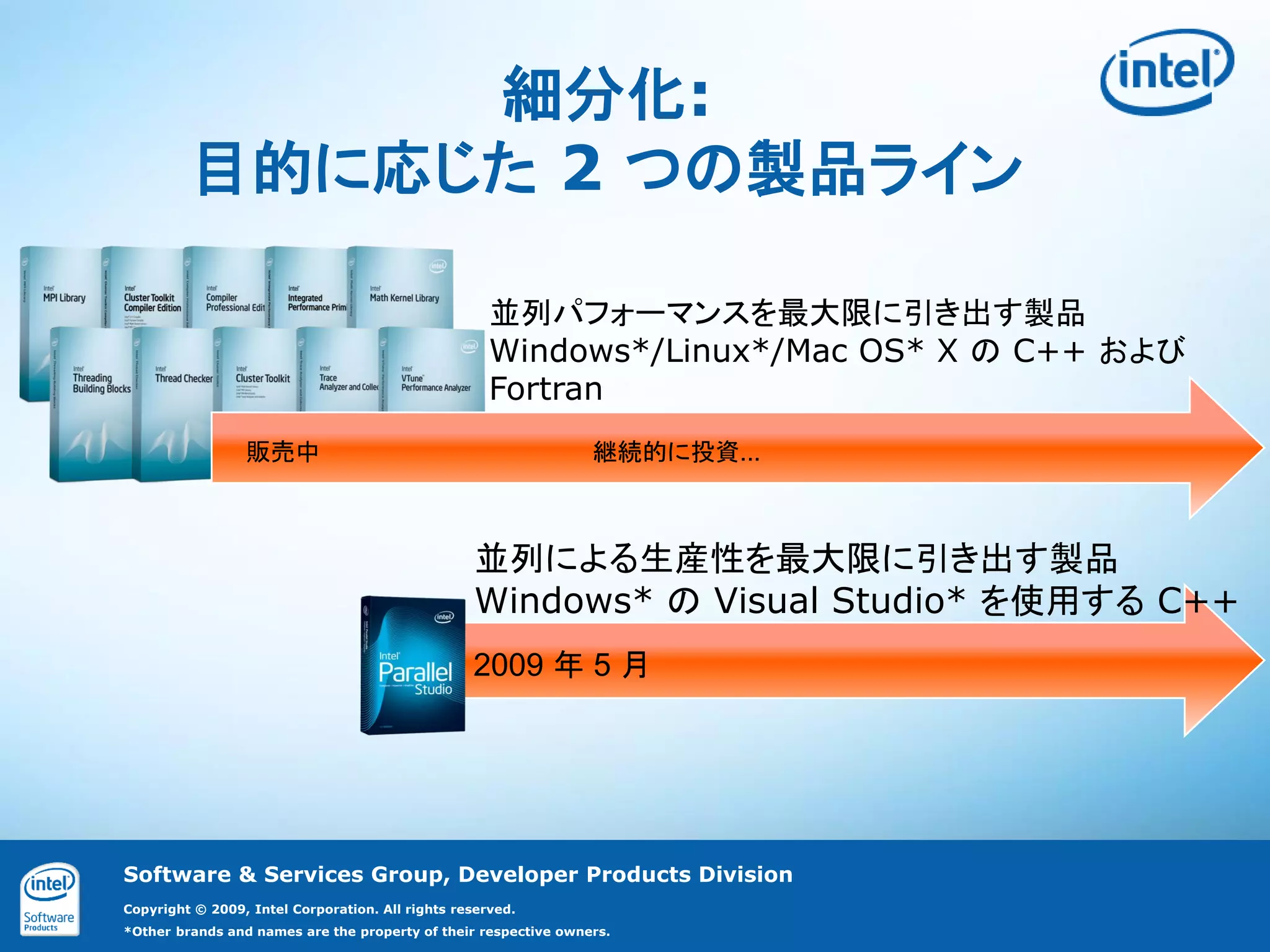
細分化:
目的に応じた 2 つの製品ライン 並列パフォーマンスを最大限に引き出す製品 Windows*/Linux*/Mac OS* X の C++ および Fortran 販売中 継続的に投資... 並列による生産性を最大限に引き出す製品 Windows* の Visual Studio* を使用する C++ 2009 年 5 月 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
11.
インテル® スレッディング・ビルディング・ ブロック
(インテル® TBB) • 並列化向けに C++ を拡張 • 複数の箇所で C++ の課題を解決 • あらゆる C++ コンパイラー、プロセッサー、OS に移植可能。 すでに幅広い移植実績有り! • インテルが開始したオープン・ソース・プロジェクト • インテル® Parallel Studio でフルサポート Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
12.
ツールが行うべき 支援 • シリアルプログラムの開発向けに設計された古いツールの
使用では不十分 • 新しいツールの利点: • 並列化における 2 つの主要な課題 を支援: 正当性とスケーラビリティ • 適切な抽象化を提供: 保守性、“将来への保証” Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
13.
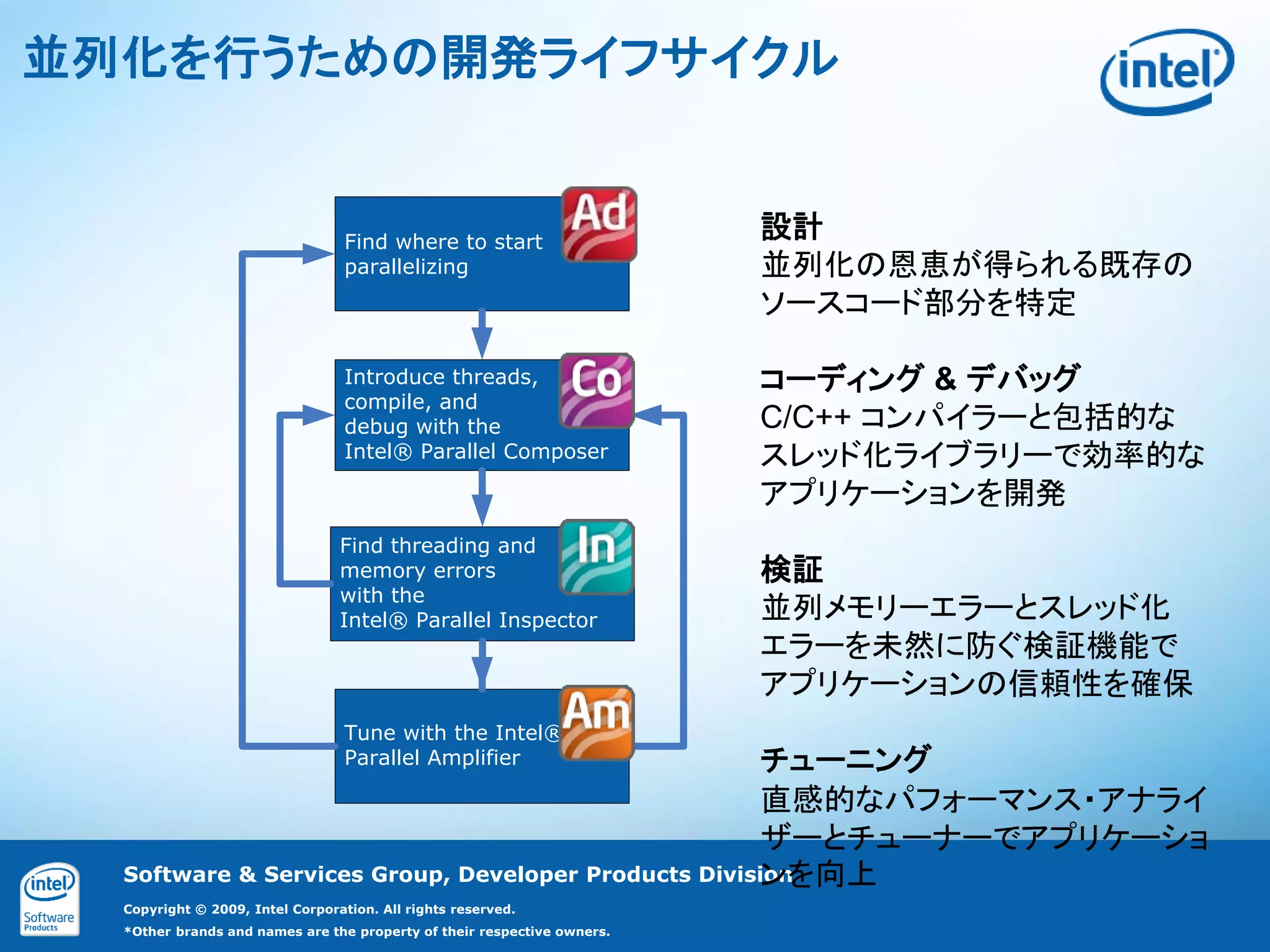
並列化を行うための開発ライフサイクル
Find where to start 設計 parallelizing 並列化の恩恵が得られる既存の ソースコード部分を特定 Introduce threads, コーディング & デバッグ compile, and debug with the C/C++ コンパイラーと包括的な Intel® Parallel Composer スレッド化ライブラリーで効率的な アプリケーションを開発 Find threading and memory errors 検証 with the Intel® Parallel Inspector 並列メモリーエラーとスレッド化 エラーを未然に防ぐ検証機能で アプリケーションの信頼性を確保 Tune with the Intel® Parallel Amplifier チューニング 直感的なパフォーマンス・アナライ ザーとチューナーでアプリケーショ ンを向上 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
14.
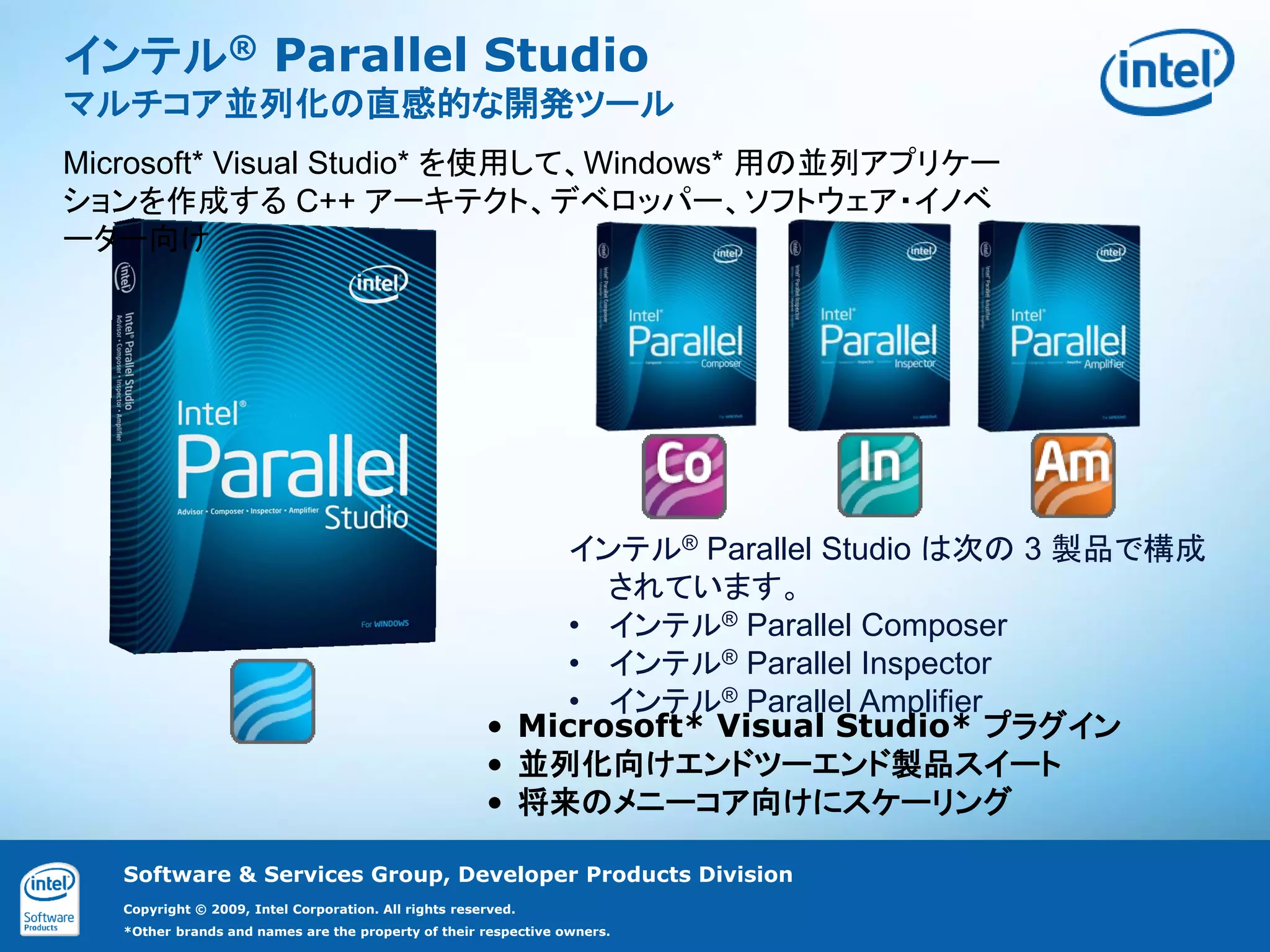
インテル® Parallel Studio マルチコア並列化の直感的な開発ツール Microsoft*
Visual Studio* を使用して、Windows* 用の並列アプリケー ションを作成する C++ アーキテクト、デベロッパー、ソフトウェア・イノベ ーター向け インテル® Parallel Studio は次の 3 製品で構成 されています。 • インテル® Parallel Composer • インテル® Parallel Inspector • インテル® Parallel Amplifier • Microsoft* Visual Studio* プラグイン • 並列化向けエンドツーエンド製品スイート • 将来のメニーコア向けにスケーリング Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
15.
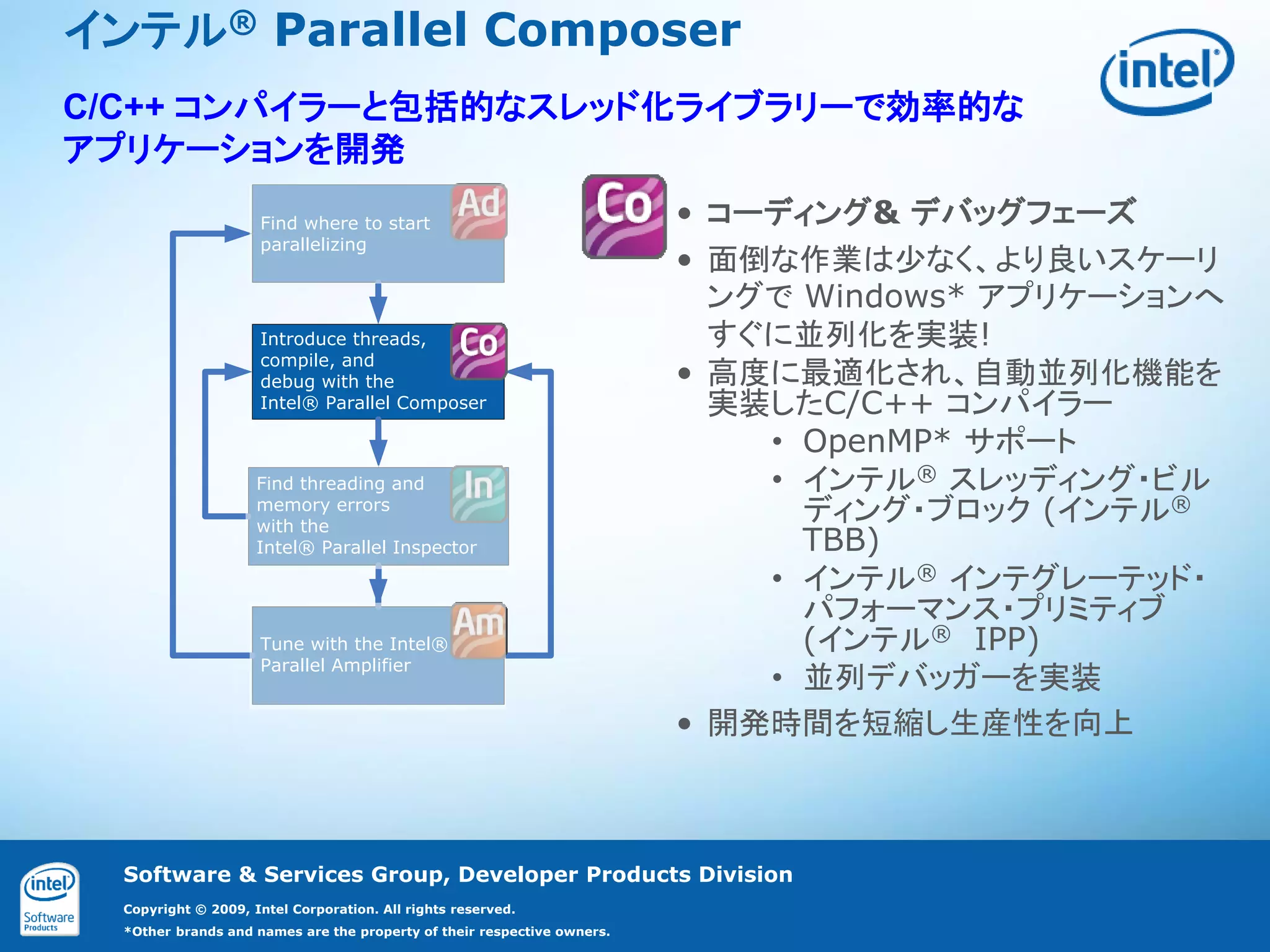
インテル® Parallel Composer C/C++
コンパイラーと包括的なスレッド化ライブラリーで効率的な アプリケーションを開発 Find where to start • コーディング& デバッグフェーズ parallelizing • 面倒な作業は尐なく、より良いスケーリ ングで Windows* アプリケーションへ Introduce threads, すぐに並列化を実装! compile, and debug with the • 高度に最適化され、自動並列化機能を Intel® Parallel Composer 実装したC/C++ コンパイラー • OpenMP* サポート Find threading and • インテル® スレッディング・ビル memory errors with the ディング・ブロック (インテル® Intel® Parallel Inspector TBB) • インテル® インテグレーテッド・ パフォーマンス・プリミティブ Tune with the Intel® (インテル® IPP) Parallel Amplifier • 並列デバッガーを実装 • 開発時間を短縮し生産性を向上 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
16.
インテル® Parallel Composer OpenMPに対するKeyWord
の拡張 OpenMP 3.0 のtask 機能を簡易表記で利用するこ とが可能 __taskcomplete { __task f_sum(500, a, b, c); __task f_sum(500, a+500, b+500, c+500); } void f_sum ( int length, int *a, int *b, int *c ) { int i; __par for (i=0; i<length; i++) { c[i] = a[i] + b[i]; データ並列 } アルゴリズムに利用 } Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 2009/12/5
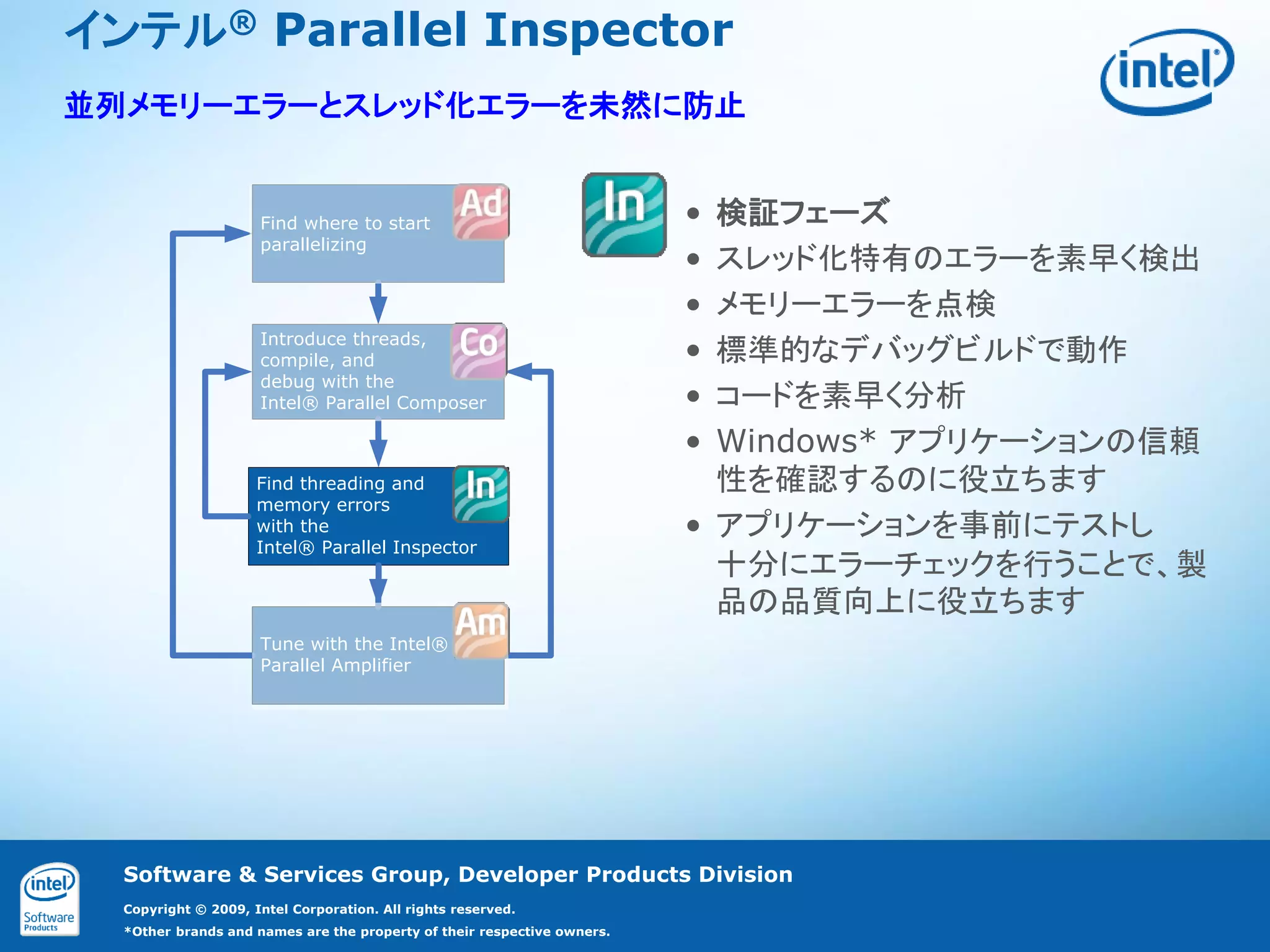
17.
インテル® Parallel Inspector 並列メモリーエラーとスレッド化エラーを未然に防止
Find where to start • 検証フェーズ parallelizing • スレッド化特有のエラーを素早く検出 • メモリーエラーを点検 Introduce threads, compile, and • 標準的なデバッグビルドで動作 debug with the Intel® Parallel Composer • コードを素早く分析 • Windows* アプリケーションの信頼 Find threading and 性を確認するのに役立ちます memory errors with the • アプリケーションを事前にテストし Intel® Parallel Inspector 十分にエラーチェックを行うことで、製 品の品質向上に役立ちます Tune with the Intel® Parallel Amplifier Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
18.
インテル® Parallel Inspector スレッド化エラーを特定
スレッド化特有のエラーの位 置と状態を表示 コード行を素早く参照 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
19.
17 インテル® Parallel Inspector メモリーエラーの特定
メモリーリークの位置や サイズを特定 観測結果により 問題を特定 観測結果を特定の コードに縮小 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
20.
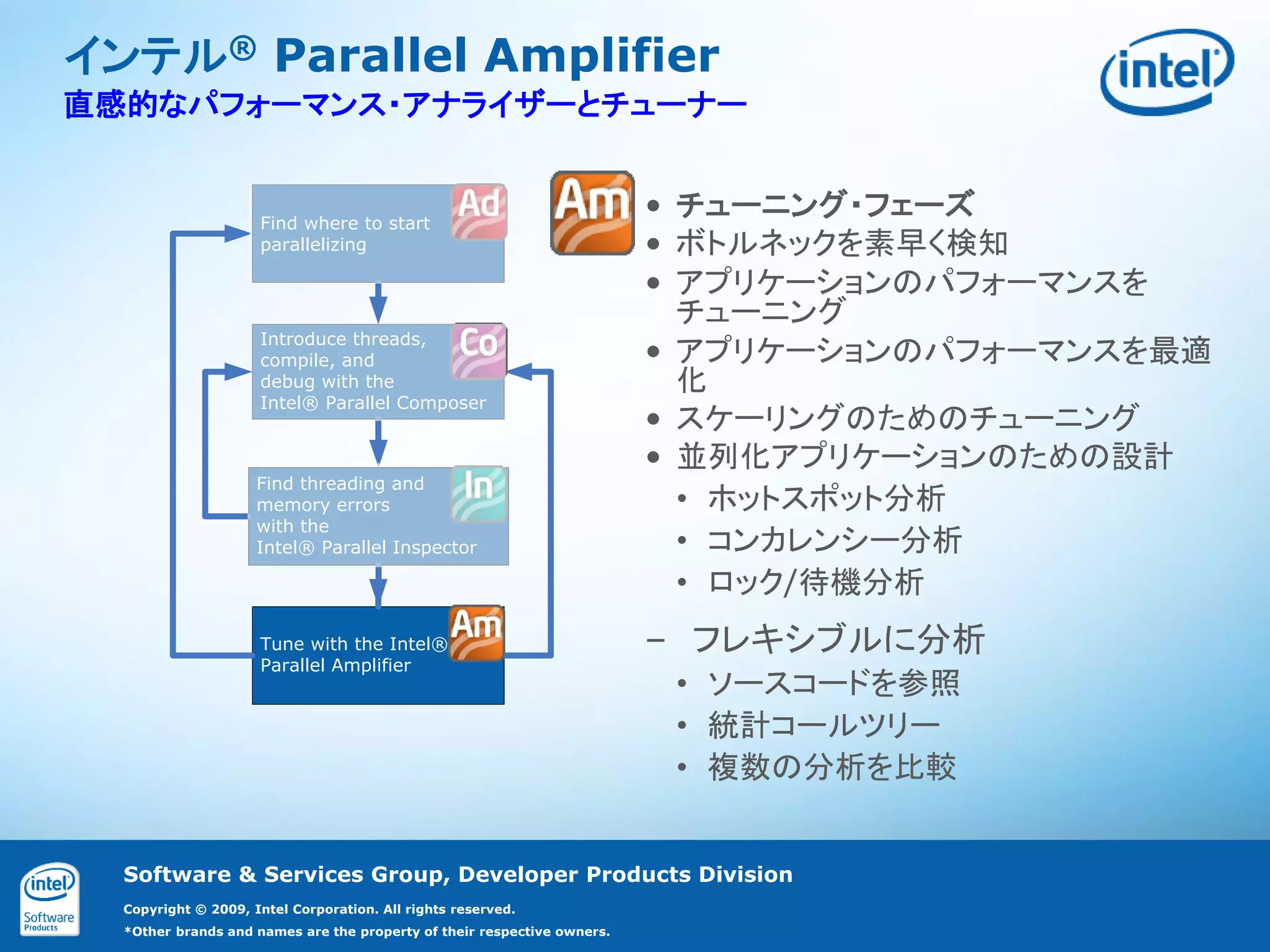
インテル® Parallel Amplifier 直感的なパフォーマンス・アナライザーとチューナー
Find where to start • チューニング・フェーズ parallelizing • ボトルネックを素早く検知 • アプリケーションのパフォーマンスを チューニング Introduce threads, compile, and • アプリケーションのパフォーマンスを最適 debug with the 化 Intel® Parallel Composer • スケーリングのためのチューニング • 並列化アプリケーションのための設計 Find threading and memory errors • ホットスポット分析 with the Intel® Parallel Inspector • コンカレンシー分析 • ロック/待機分析 Tune with the Intel® – フレキシブルに分析 Parallel Amplifier • ソースコードを参照 • 統計コールツリー • 複数の分析を比較 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
21.
インテル® Parallel Amplifier hotspot
分析によるボトルネックの検出 アプリケーションで時間がかかっている場所は? パフォーマンスに最もインパクトのある クリティカル・ファンクションを素早く見つけます どうしてそうなっているのか? クリティカル・ファンクションの使用を 削減できそうな場所をコールスタックで ハイライトします Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
22.
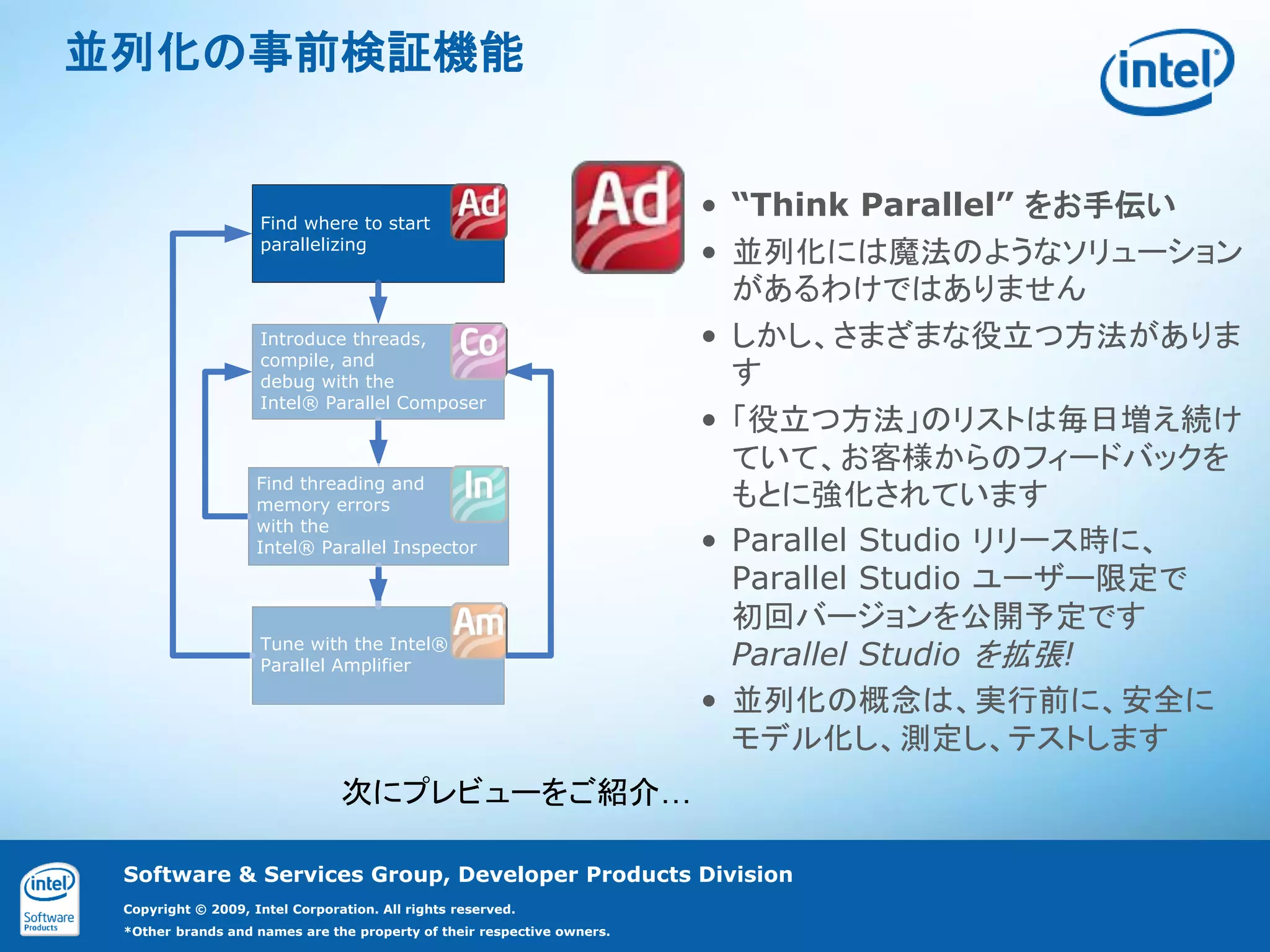
並列化の事前検証機能
Find where to start • “Think Parallel” をお手伝い parallelizing • 並列化には魔法のようなソリューション があるわけではありません Introduce threads, • しかし、さまざまな役立つ方法がありま compile, and debug with the す Intel® Parallel Composer • 「役立つ方法」のリストは毎日増え続け ていて、お客様からのフィードバックを Find threading and memory errors もとに強化されています with the Intel® Parallel Inspector • Parallel Studio リリース時に、 Parallel Studio ユーザー限定で 初回バージョンを公開予定です Tune with the Intel® Parallel Amplifier Parallel Studio を拡張! • 並列化の概念は、実行前に、安全に モデル化し、測定し、テストします 次にプレビューをご紹介… Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
23.
Visual Studio* 2010
による並列化 コミュニティー・テクノロジー・プレビュー インテル® Parallel インテル® Studio Parallel Parallel Studio は Inspector、 VS2005、 Amplifier VS2008、 将来の VS2010 OpenMP* をサポート インテル® TBB インテルは Microsoft* Concurrency Runtime をサポート Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
24.
インテル® ソフトウェア開発製品 関連書籍
インテル® Parallel Studio プログラミングガイド Windows* C++ での並列プログラミングにおける最適な最初のステップ 著者: 池井 満、林 浩史 、田中 智子 インテル® スレッディング・ C/C++ プログラマーの ビルディング・ブロック ための OpenMP* 並列 マルチコア時代の C++ 並列 プログラミング プログラミング OpenMP* を詳説 著者: James Reinders 著者: 菅原 清文 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
25.
Ct テクノロジー:マルチコアおよびメニーコアプロセッサー のための 高生産性
スループット・コンピューティング 池井 満 ソフトウェア&サービス統括本部部長 インテル株式会社 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners.
26.
目次 概要 ‐ Ctテクノロジーとは何? ‐ Ctテクノロジーがもたらす価値とは? ‐
Ctテクノロジーの主要な機能とは?またその利点とは? ‐ どのようなワークロードに向くのか 詳細 ‐ Ctテクノロジーはどのようなもの? ‐ Ctテクノロジーはどうやって動く? ‐ どのようなツールをサポートするのか? Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 26
27.
Ctテクノロジーとは何か? • アプリケーション開発者を特定のハードウェア・アーキテク
チャーに依存させない汎用のデータ・パラレル・プログラミン グの方法 • 既存の開発環境に統合することができ、それによってハイレ ベルで並列化アルゴリズムの仕様を定めさせることができる システム • ハイレベルに記述した計算を効率的に並列化して実装できる 動的コンパイラーとランタイムで、SIMDとスレッドレベルの並 列化、およびアクセラレーターの両者の恩恵を受けることが できます。 • アプリケーション開発者が「パフォーマンス(性能)」、「ポータ ビリティー(移植性)」および「プロダクティビティー(生産性)」 を両立させることができるシステムです。 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 27
28.
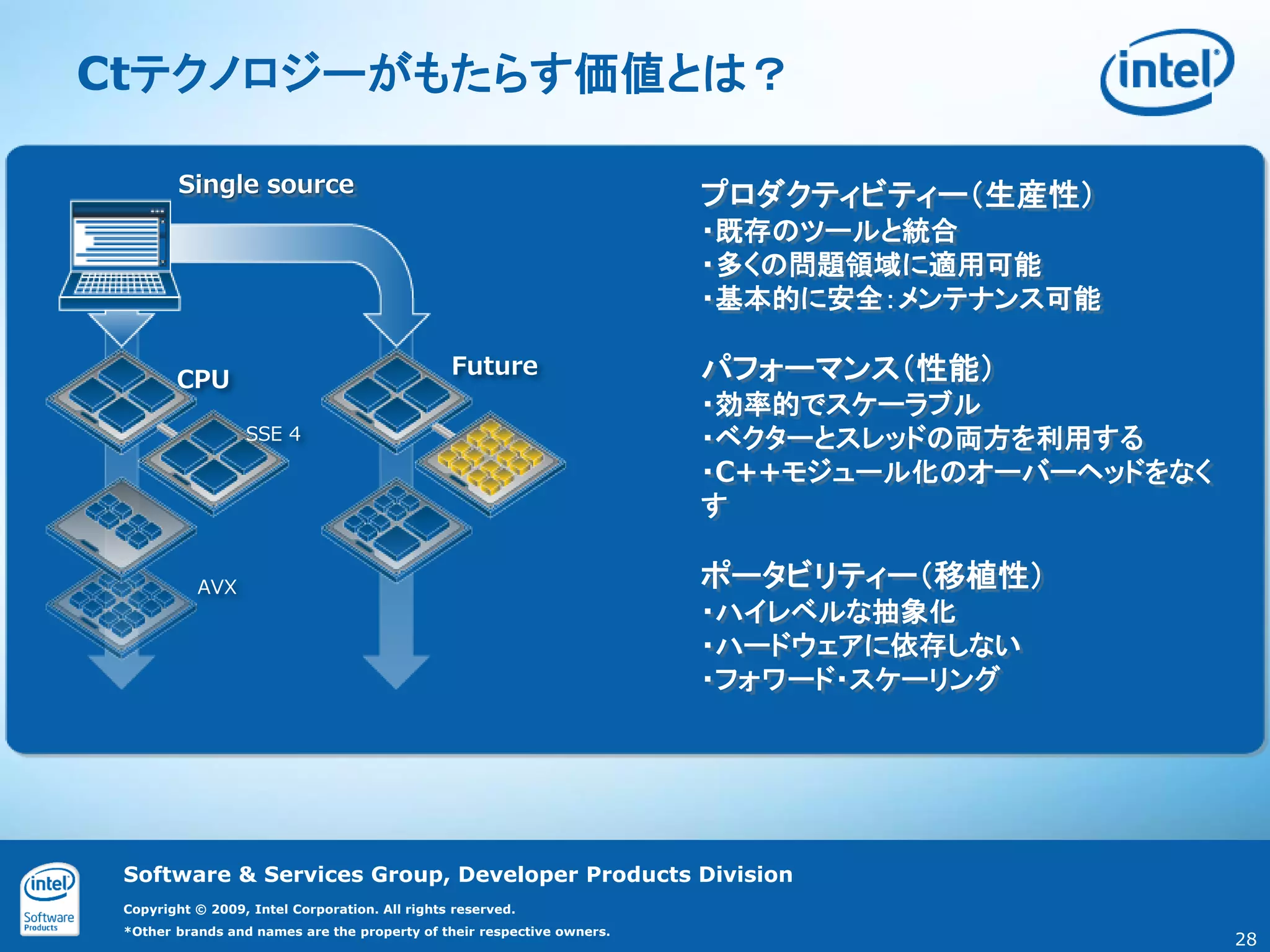
Ctテクノロジーがもたらす価値とは?
Single source プロダクティビティー(生産性) ・既存のツールと統合 ・多くの問題領域に適用可能 ・基本的に安全:メンテナンス可能 Future パフォーマンス(性能) CPU ・効率的でスケーラブル SSE 4 ・ベクターとスレッドの両方を利用する ・C++モジュール化のオーバーヘッドをなく す AVX ポータビリティー(移植性) ・ハイレベルな抽象化 ・ハードウェアに依存しない ・フォワード・スケーリング Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 28
29.
プロダクティビティー(生産性) • 統合:既存のIDE、ツールやコンパイラーと統合:新しいコンパイラーは不要
です • 相互運用:他のインテル並列化ツールやライブラリーと相互に運用可能 • インクリメンタル:既存コードを基に選択的または目標を絞って修正が可能 • 豊かな表現:シンタックス(構文)はアプリケーションのエキスパートに配慮し てある • 基本的に安全:決定論的なセマンティックスにより、レース状態やデッドロッ クは発生しない • 簡単に学べる:逐次的で一貫性のあるセマンティックスとシンプルなインター フェースにより既存のスキルを活用できる • 幅広く適用可能:汎用的なデータ並列化のモデルは、多くの種類の計算に 適用可能 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 29
30.
パフォーマンス(性能) • より大きな問題へとスケール可能:データを管理して、メモリーのボトルネッ
クに直接対処する • スレッドとベクトル化による協調した並列化:一つの記述により、複数のメカ ニズムを対象にできる • モジュール化にともなうオーバーヘッドをなくす:自動的に複数のオペレー ションを融合させる • 幅広く、なおかつ深く:開発者は抽象化のレベルを選ぶことができ、必要が あれば詳細にまで掘り下げることができる Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 30
31.
ポータビリティー(移植性) • ハイレベル:特定のハードウェアのメカニズムやアーキテクチャーに
依存することがない • ISA拡張からの独立:共通バイナリーは異なるISA拡張を透過的に利用 可能である • 今あるハードウェア上での使用が可能:多数のコアまでスケールして 利用可能である • 将来のハードウェアへの移行とフォワード・スケーリングが可能: AVX、Larrabee、とさらにその先の物もサポート予定 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 31
32.
ハイレベルな抽象化によるプロダクティビティー “何をするかを指定、どのように行うかではなく”
数学的構造 データ編成 数学的構造 データレースはどこに? データ編成 デッドロックの原因は何? なぜこの計算を走らせる度に違う結 果になるのか? いくつスレッドを使えばいい? キャッシュの大きさはどれくらい? いろんなISAやベクター幅にどうやっ て対応すればいい? もともとこのコードを書いた人はどこ ?コードが何の計算をやっているの かわからない! 注力:エキスパート・アプリケーション開 発者効率性を向上させる Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 32
33.
チャレンジ: 複数の並列化のメカニズム マルチコアのシステムには、並列化の方法が何種類もあります: • パイプライン •
SIMDレジスター(SWAR)によるベクトル化 • スーパースカラー命令またはVLIW • メモリーアクセスと計算をオーバーラップさせる(プリフェッチ) • 1つのコア上でのマルチスレッディング(ハイパースレッディング) • 複数のコア • 複数のプロセッサー • 非同期にホストとアクセラレーターで実行 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 33
34.
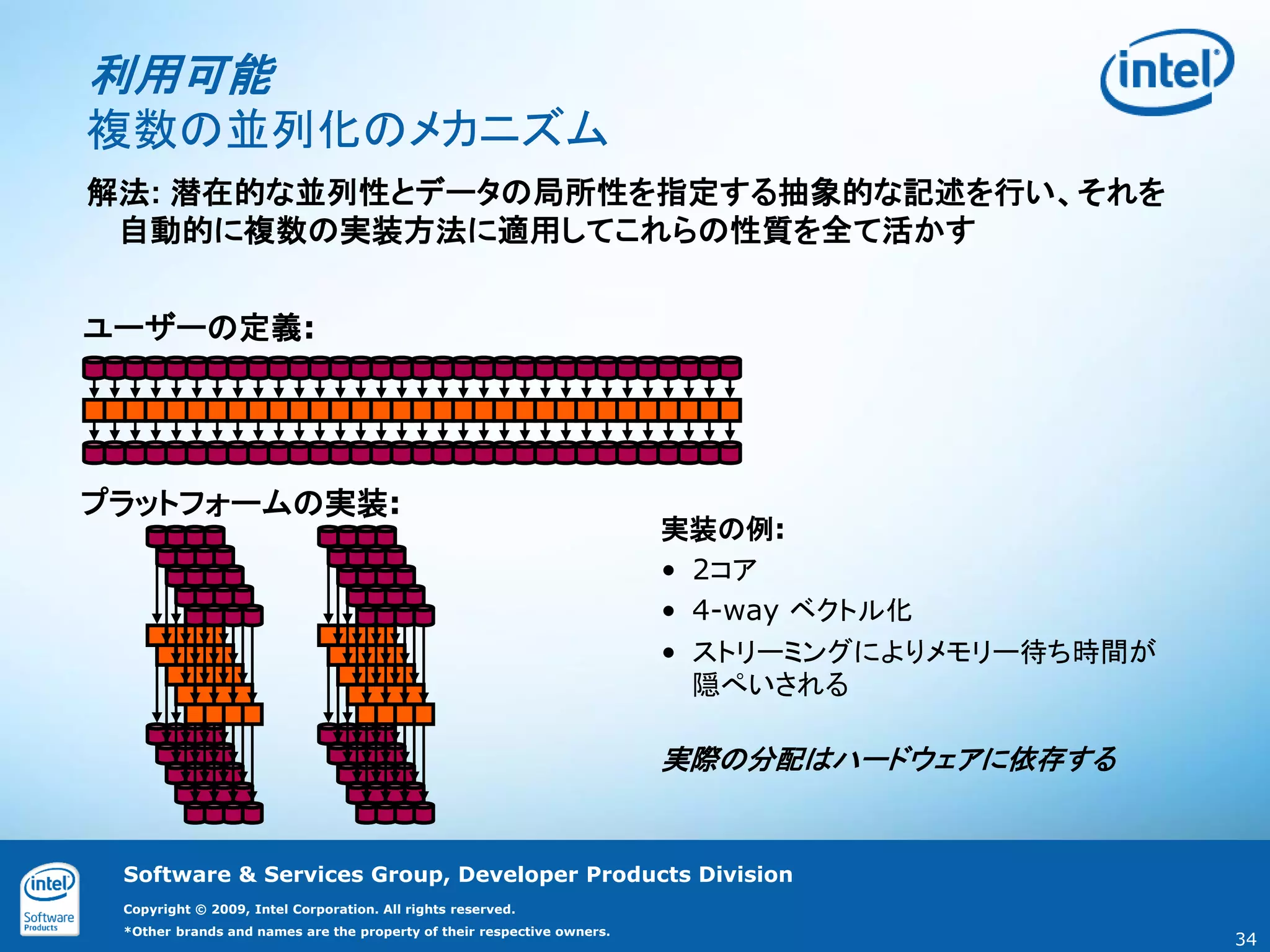
利用可能 複数の並列化のメカニズム 解法: 潜在的な並列性とデータの局所性を指定する抽象的な記述を行い、それを 自動的に複数の実装方法に適用してこれらの性質を全て活かす ユーザーの定義: プラットフォームの実装:
実装の例: • 2コア • 4-way ベクトル化 • ストリーミングによりメモリー待ち時間が 隠ぺいされる 実際の分配はハードウェアに依存する Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 34
35.
Ct vs. SSE
組み込み関数 #define NCO 4 fptype * strike, fptype * rate, fptype * volatility, fptype * time, int * otype, float timet) #if (NCO==2) { #define fptype double int i; #define SIMD_WIDTH 2 // local private working variables for the calculation #define _MMR __m128d _MMR xStockPrice; #define _MM_LOAD _mm_load_pd _MMR xStrikePrice; #define _MM_STORE _mm_store_pd _MMR xRiskFreeRate; #define _MM_MUL _mm_mul_pd _MMR xVolatility; #define _MM_ADD _mm_add_pd _MMR xTime; #define _MM_SUB _mm_sub_pd _MMR xSqrtTime; #define _MM_DIV _mm_div_pd #define _MM_SQRT _mm_sqrt_pd _MM_ALIGN16 fptype logValues[NCO]; #define _MM_SET(A) _mm_set_pd(A,A) _MMR xLogTerm; #define _MM_SETR _mm_set_pd _MMR xD1, xD2; #endif _MMR xPowerTerm; _MMR xDen; #if (NCO==4) _MM_ALIGN16 fptype d1[SIMD_WIDTH]; #define fptype float _MM_ALIGN16 fptype d2[SIMD_WIDTH]; #define SIMD_WIDTH 4 _MM_ALIGN16 fptype FutureValueX[SIMD_WIDTH]; #define _MMR __m128 _MM_ALIGN16 fptype NofXd1[SIMD_WIDTH]; #define _MM_LOAD _mm_load_ps _MM_ALIGN16 fptype NofXd2[SIMD_WIDTH]; #define _MM_STORE _mm_store_ps _MM_ALIGN16 fptype NegNofXd1[SIMD_WIDTH]; #define _MM_MUL _mm_mul_ps _MM_ALIGN16 fptype NegNofXd2[SIMD_WIDTH]; #define _MM_ADD _mm_add_ps #define _MM_SUB _mm_sub_ps xStockPrice = _MM_LOAD(sptprice); #define _MM_DIV _mm_div_ps xStrikePrice = _MM_LOAD(strike); template <typename T> #define _MM_SQRT _mm_sqrt_ps xRiskFreeRate = _MM_LOAD(rate); Vec<T> CND(Vec<T> x) #define _MM_SET(A) _mm_set_ps(A,A,A,A) xVolatility = _MM_LOAD(volatility); { #define _MM_SETR _mm_set_ps xTime = _MM_LOAD(time); Vec<T> l = abs(x); #endif Vec<T> k = 1.0f / ( 1.0f + 0.2316419f * l); xSqrtTime = _MM_SQRT(xTime); __forceinline void CNDF ( fptype * OutputX, fptype * InputX ) Vec<T> w = { for(i=0; i<SIMD_WIDTH;i ++) { 0.31938153f * k - _MM_ALIGN16 int sign[SIMD_WIDTH]; logValues[i] = log(sptprice[i] / strike[i]); 0.356563782f * k * k + int i; } 1.781477937f * k * k * k - _MMR xInput; 1.821255978f * k * k * k * k + _MMR xNPrimeofX; xLogTerm = _MM_LOAD(&(logValues[0])); 1.330274429f * k * k * k * k * k; _MM_ALIGN16 fptype expValues[SIMD_WIDTH]; _MMR xK2; xPowerTerm = _MM_MUL(xVolatility, xVolatility); w = w * inv_sqrt_2xPI * exp(l * l * -0.5f); _MMR xK2_2, xK2_3, xK2_4, xK2_5; xPowerTerm = _MM_MUL(xPowerTerm, _MM_SET(0.5)); w = select(x > 0, 1.0f - w, w); _MMR xLocal, xLocal_1, xLocal_2, xLocal_3; // xPowerTerm = _mm_div_pd(xPowerTerm, _MM_SET(2.0, Ct SSE return w; 2.0)); } for (i=0; i<SIMD_WIDTH; i++) { // Check for negative value of InputX xD1 = _MM_ADD(xRiskFreeRate, xPowerTerm); template <typename T> if (InputX[i] < 0.0) { xD2 = _MM_SUB(xRiskFreeRate, xPowerTerm); void ctBlackScholesKern(Vec<T> s, InputX[i] = -InputX[i]; Vec<T> x, sign[i] = 1; xD1 = _MM_MUL(xD1, xTime); Vec<T> r, } else xD2 = _MM_MUL(xD2, xTime); Vec<T> v, sign[i] = 0; Vec<T> t, } xD1 = _MM_ADD(xD1, xLogTerm); Vec<T>& result) xD2 = _MM_ADD(xD2, xLogTerm); { xInput = _MM_LOAD(InputX); Vec<T> sqrt_value = v * sqrt(t); xDen = _MM_MUL(xVolatility, xSqrtTime); Vec<T> d1 = ln(s / x) + (r + v * v * 0.5f ) * t) / sqrt_value; // Compute NPrimeX term common to both four & six decimal xD1 = _MM_DIV(xD1, xDen); Vec<T> d2 = d1 - sqrt_value; accuracy calcs // VL: 10/15/06. An optimization is not to recompute xD2, but to for (i=0; i<SIMD_WIDTH; i++) { derive it from xD1 result = x * exp(0f - r * t) * (1.0f - CND(d2)) + (-s) * (1.0 - CND(d1)); expValues[i] = exp(-0.5f * InputX[i] * InputX[i]); // xD2 = _MM_DIV(xD2, xDen); } // printf("exp[%d]: %f¥n", i, expValues[i]); xD2 = _MM_SUB(xD1, xDen); } _MM_STORE(d1, xD1); template <typename T> xNPrimeofX = _MM_LOAD(expValues); _MM_STORE(d2, xD2); void ctBlackScholes(T *option_price, int num_options, xNPrimeofX = _MM_MUL(xNPrimeofX, T *stkprice, T *strike, T *rate, T *volatility, _MM_SET(inv_sqrt_2xPI)); CNDF( NofXd1, d1 ); T *time) CNDF( NofXd2, d2 ); { xK2 = _MM_MUL(_MM_SET((fptype)0.2316419), xInput); Vec<T> s(stkprice, num_options); xK2 = _MM_ADD(xK2, _MM_SET((fptype)1.0)); for (i=0; i<SIMD_WIDTH; i++) { Vec<T> x(strike, num_options); xK2 = _MM_DIV(_MM_SET((fptype)1.0), xK2); FutureValueX[i] = strike[i] * (exp(-(rate[i])*(time[i]))); Vec<T> r(rate, num_options); // xK2 = _mm_rcp_pd(xK2); // No rcp function for double- Vec<T> v(volatility, num_options); precision NegNofXd1[i] = ((fptype)1.0 - (NofXd1[i])); Vec<T> t(time, num_options); NegNofXd2[i] = ((fptype)1.0 - (NofXd2[i])); Vec<T> result(option_price, num_options); xK2_2 = _MM_MUL(xK2, xK2); OptionPrice[i] = (FutureValueX[i] * NegNofXd2[i]) - rcall( ctBlackScholesKern<T> )( s,x,r,v,t,result ); xK2_3 = _MM_MUL(xK2_2, xK2); (sptprice[i] * NegNofXd1[i]); } xK2_4 = _MM_MUL(xK2_3, xK2); } xK2_5 = _MM_MUL(xK2_4, xK2); } xLocal_1 = _MM_MUL(xK2, _MM_SET((fptype)0.319381530)); void sseBlackScholes(fptype *option_price, xLocal_2 = _MM_MUL(xK2_2, _MM_SET((fptype)- int num_options, 42 lines 0.356563782)); fptype *stkprice, xLocal_3 = _MM_MUL(xK2_3, fptype *strike, _MM_SET((fptype)1.781477937)); fptype *rate, xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); fptype *volatility, xLocal_3 = _MM_MUL(xK2_4, _MM_SET((fptype)- fptype *time) 1.821255978)); { • ベクトル化 xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); for (int i = 0; i < num_options; i += NCO) { xLocal_3 = _MM_MUL(xK2_5, // Calling main function to calculate option value based on _MM_SET((fptype)1.330274429)); Black & Sholes's xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); // equation. BlkSchlsEqEuroNoDiv(&(option_price[i]), NCO, &(stkprice[i]), xLocal_1 = _MM_ADD(xLocal_2, xLocal_1); &(strike[i]), • スレッド化 xLocal = _MM_MUL(xLocal_1, xNPrimeofX); &(rate[i]), &(volatility[i]), &(time[i]), xLocal = _MM_SUB(_MM_SET((fptype)1.0), xLocal); NULL/*&(otype[i])*/, 0); } _MM_STORE(OutputX, xLocal); } 186 lines // _mm_storel_pd(&OutputX[0], xLocal); // _mm_storeh_pd(&OutputX[1], xLocal); • マシン非依存 for (i=0; i<SIMD_WIDTH; i++) { if (sign[i]) { OutputX[i] = ((fptype)1.0 - OutputX[i]); • ベクトル化 } } } void BlkSchlsEqEuroNoDiv (fptype * OptionPrice, int numOptions, fptype * sptprice, • 非 スレッド化 • マシン依存 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 35
36.
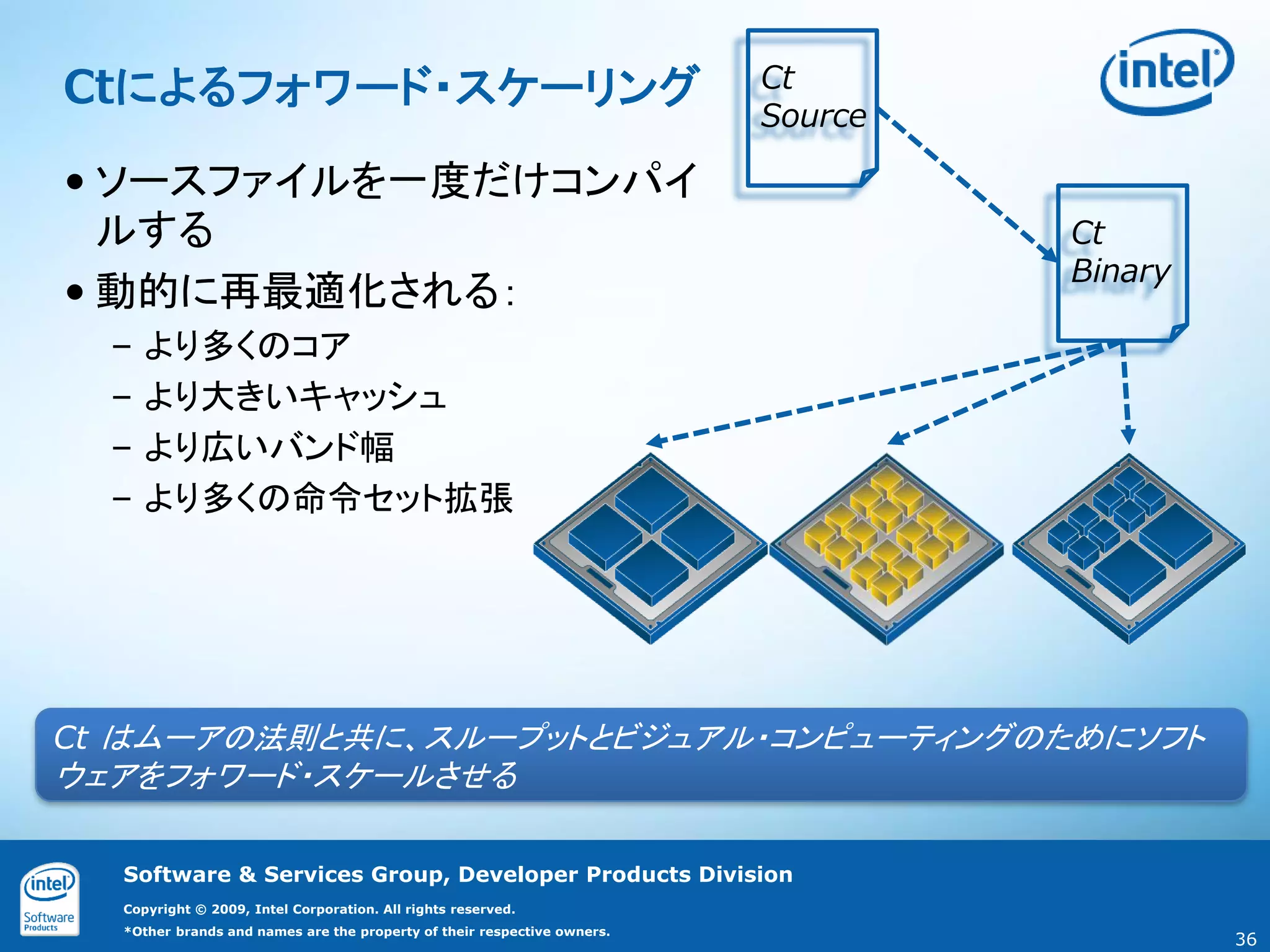
Ctによるフォワード・スケーリング
Ct Source • ソースファイルを一度だけコンパイ ルする Ct Binary • 動的に再最適化される: – より多くのコア – より大きいキャッシュ – より広いバンド幅 – より多くの命令セット拡張 Ct はムーアの法則と共に、スループットとビジュアル・コンピューティングのためにソフト ウェアをフォワード・スケールさせる Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 36
37.
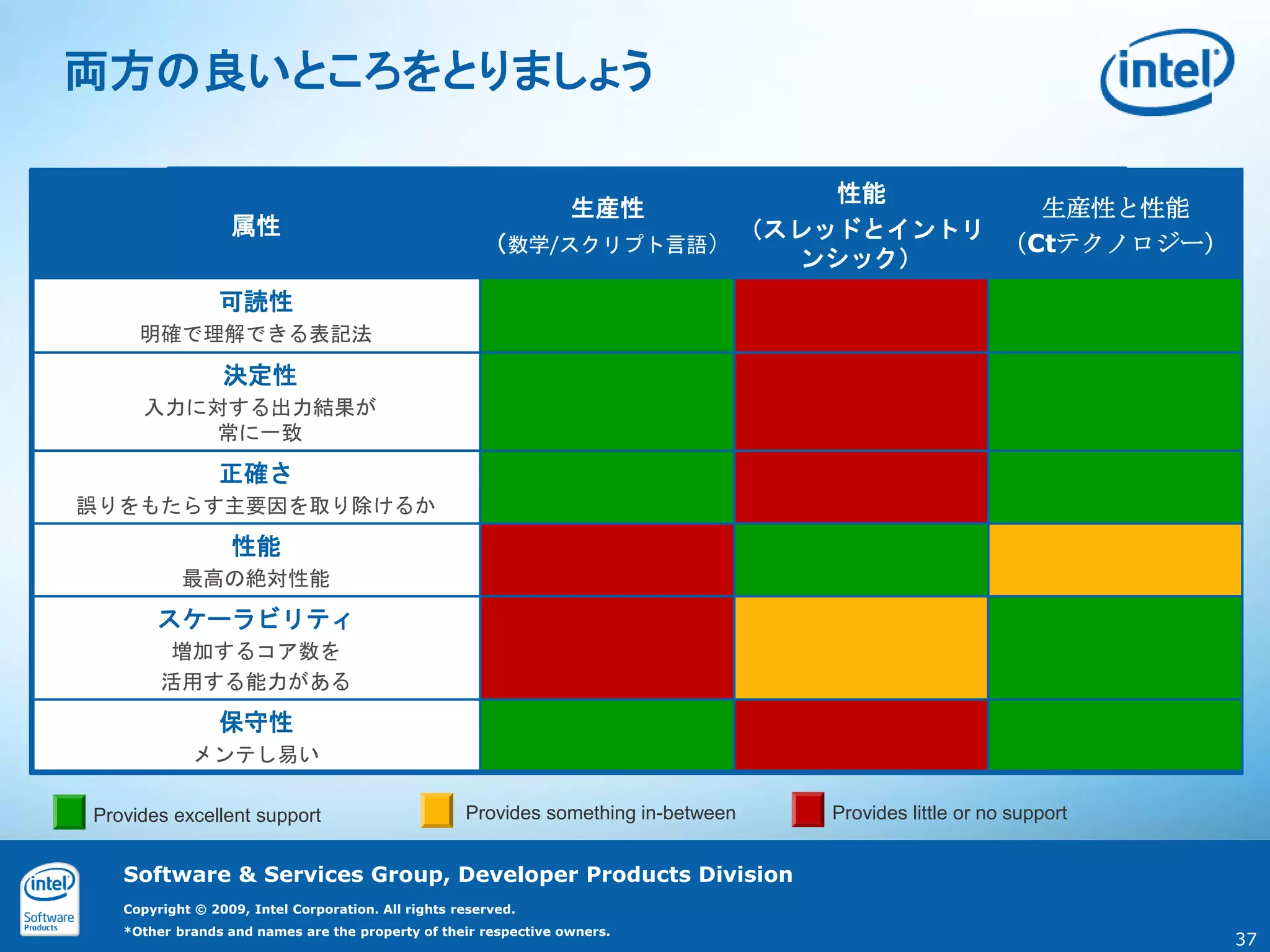
両方の良いところをとりましょう
性能 性能 生産性 生産性 生産性と性能 属性 属性 (スレッドとイントリ (スレッドとイントリ (数学/スクリプト言語) (数学/スクリプト言語) (Ctテクノロジー) ンシック) ンシック) 可読性 可読性 明確で理解できる表記法 明確で理解できる表記法 決定性 決定性 入力に対する出力結果が 入力に対する出力結果が 常に一致 常に一致 正確さ 正確さ 誤りをもたらす主要因を取り除けるか 誤りをもたらす主要因を取り除けるか 性能 性能 最高の絶対性能最高の絶対性能 スケーラビリティ スケーラビリティ 増加するコア数を 増加するコア数を 活用する能力がある 活用する能力がある 保守性 保守性 メンテし易い メンテし易い Provides excellent support Provides something in-between Provides little or no support Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 37
38.
何に活用できるのか? 生物情報学
ビジュアル・コンピューティング ・ゲノミクスと遺伝子配列分析 ・デジタル・コンテンツ・クリエイション(DCC) ・分子力学 ・物理エンジンと高度なレンダリング 工学設計 ・可視化 ・有限要素と有限差分シミュレーション ・圧縮/解凍 ・モンテカルロ・シミュレーション 信号処理画像処理 財務分析 ・コンピューター・ビジョン ・オプションと証券の値付け ・レーダーとソナー処理 ・リスク分析 ・顕微鏡画像や衛星画像処理 石油とガス 科学研究 ・地震時の状況再現 ・学習機械と人工知能 ・貯留層シミュレーション ・気候と天候シミュレーション 医療画像 ・惑星探査と天体物理学 ・画像と体積の再現 企業 ・分析とコンピューター支援検出(CAD) ・データベース検索 ・企業情報 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 38
39.
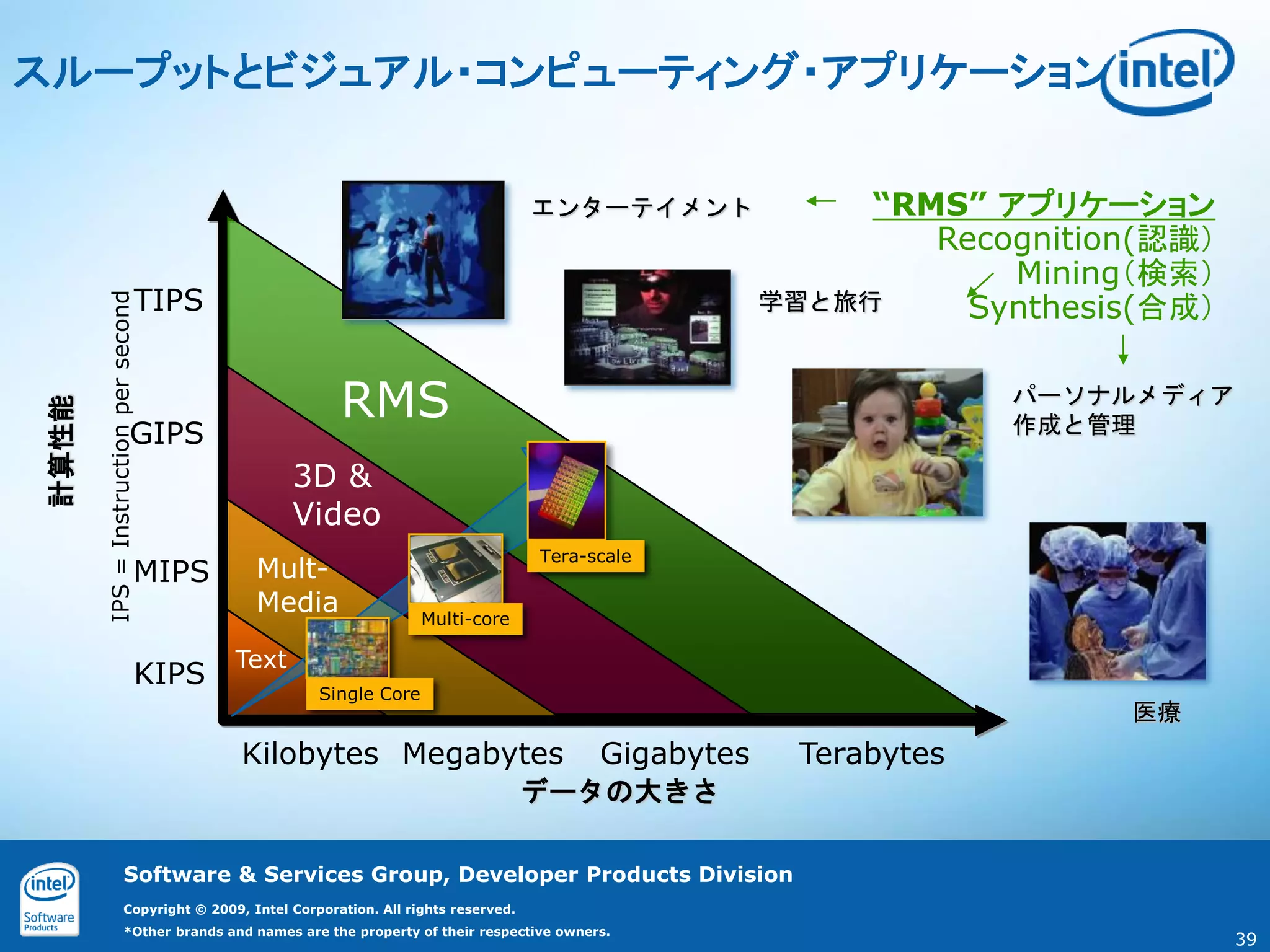
スループットとビジュアル・コンピューティング・アプリケーション
エンターテイメント “RMS” アプリケーション Recognition(認識) Mining(検索) TIPS 学習と旅行 Synthesis(合成) IPS = Instruction per second RMS パーソナルメディア 計算性能 GIPS 作成と管理 3D & Video Tera-scale MIPS Mult- Media Multi-core Text KIPS Single Core 医療 Kilobytes Megabytes Gigabytes Terabytes データの大きさ Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 39
40.
パフォーマンスによって広がる新しい可能性 不規則な/疎データの
新しい並列演算と JITにより並列化を コア数の増加に伴って 並列データ データ構造 補強 スケールする (例:顔面認識) Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 40
41.
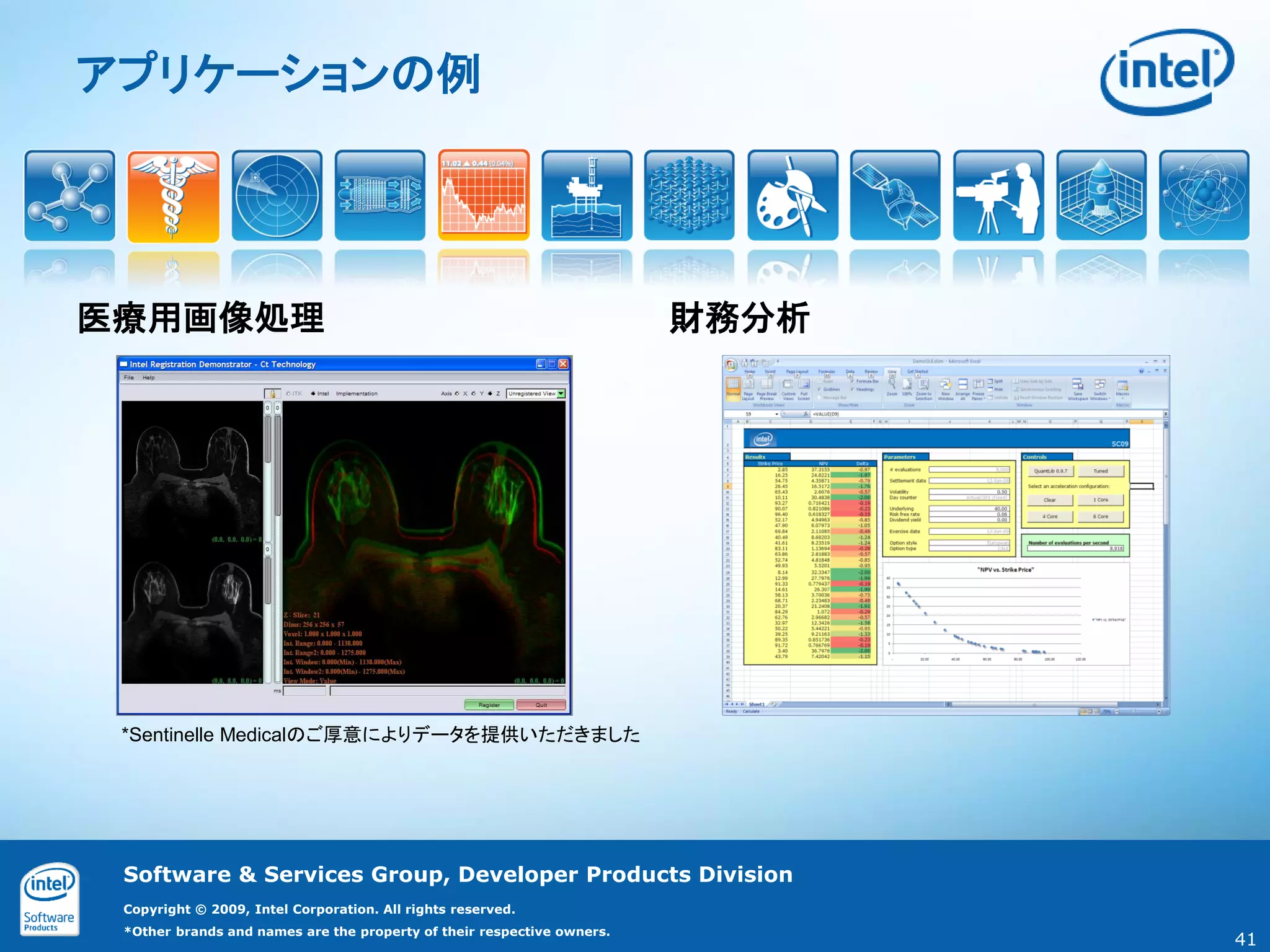
アプリケーションの例 医療用画像処理
財務分析 *Sentinelle Medicalのご厚意によりデータを提供いただきました Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 41
42.
Ctテクノロジーは コードを自動並列化するものではありません – Ctは効果的な並列化コードを効率よく書くためのサポートを提供しま
す タスク並列化によるものではありません – タスク並列化では、大量のプロセッサー上で性能をスケールさせること は難しい – デッドロックやデータレースなどはデバッグが難しい – Ct “デフォルトで安全な”データ並列化に重点を置いています 新しい言語ではありません – 既存の標準C++コンパイラー環境内で動作します – CtはC++に新しいタイプとオペレーションを追加します Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 42
43.
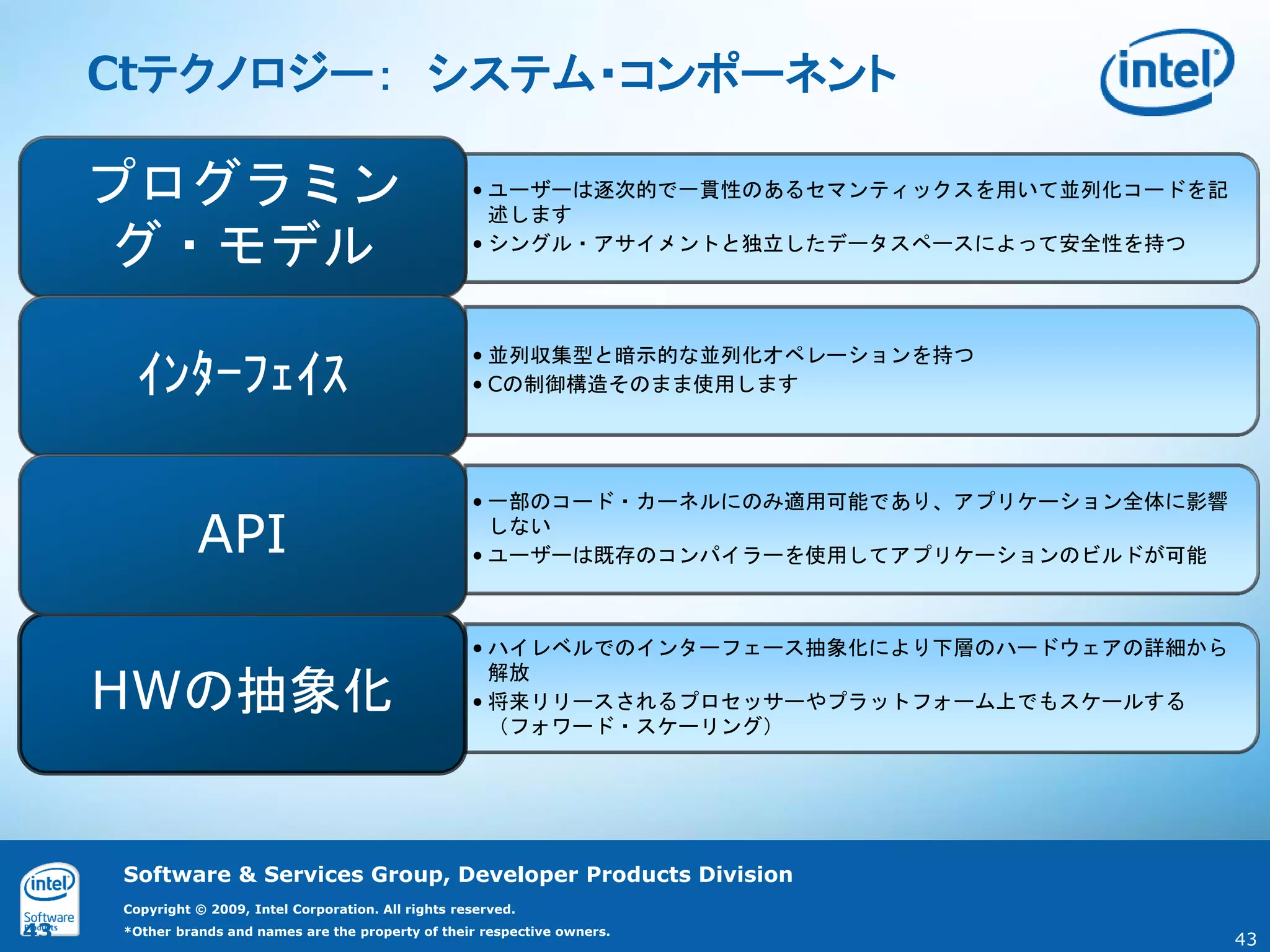
Ctテクノロジー: システム・コンポーネント
プログラミン • ユーザーは逐次的で一貫性のあるセマンティックスを用いて並列化コードを記 述します グ・モデル • シングル・アサイメントと独立したデータスペースによって安全性を持つ • 並列収集型と暗示的な並列化オペレーションを持つ インターフェイス • Cの制御構造そのまま使用します • 一部のコード・カーネルにのみ適用可能であり、アプリケーション全体に影響 API しない • ユーザーは既存のコンパイラーを使用してアプリケーションのビルドが可能 • ハイレベルでのインターフェース抽象化により下層のハードウェアの詳細から HWの抽象化 解放 • 将来リリースされるプロセッサーやプラットフォーム上でもスケールする (フォワード・スケーリング) Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. 43 *Other brands and names are the property of their respective owners. 43
44.
インターフェイス:言語としてのAPI C++を拡張するシンタックスとセマンティクス C++に並列集合オブジェクトとメソッドを追加する – テンプレートと、演算子の多重定義を使用して新しい型と演算を定義 標準C++コンパイラー環境内で動作します
– インテル® C++コンパイラー – Microsoft* Visual* C++ コンパイラー – Gnu Compiler Collection* 数学的表記を使用してアルゴリズムを表現します – 開発者は、「どうやって行うか」ではなく、「何をするか」に集中できる シーケンシャルなセマンティックスを使用する – 開発者はスレッドやロック、または低レベルの機構を使わずにすみ、それらに伴 う複雑性を回避することができる プログラマは並列化ではなく、処理の流れを考えられる Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 44
45.
インターフェイス:プログラミング言語としてのAPI C++を拡張するシンタックスとセマンティクス データ
演算 データは隔離された「データスペー 演算はCt コレクションと/または ス」保持され、収集クラスによって管 スカラー型を通じたオペレーショ 理されます ンにて、C++関数として記述さ 規則的なデータ: れる。 – Vec: 1Dデータの塊 – Vec2D: 2Dデータの塊 コンポーネントごとと集合オペ – Vec3D: 3Dデータの塊 レーションの両方をサポート – Tuple: 固定長 n組 演算が呼び出される要素 不規則なデータ: – Map: 配列の全ての要素上で関数 を並列に実行 – VecIndexed, VecNested – Call: 並列オペレーションを逐次実 行 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 45
46.
集合オブジェクト Vecは基本的な並列集合オブジェ
#include "ct.h“ using namespace Ct; クト型 • 値に対する呼び名 int main(int argc, char *argv[]) { • ランタイムによって管理される // A Vec declaration must specify a base • フラット、複数次元、または不規 // type: Vec<basetype> aTypedVector; 則な入れ子 // For example, DoubleVec can refer to any // vector of doubles. • API を介して排他的に生成そして Vec<F64> DoubleVec; 操作される // A regular 2 dimensional vector: –決定性と分離 Vec2D<I8> 2DMatrix (“{{0,1,2}, {3,4,5}, {6,7,8}}”); –パフォーマンス追及のために上書きや 直接操作 //An irregularly nested vector: VecNested<I32> IrregularVector (“{{0,1,2}, {3,4}, {5,6,7,8}}”); return 0; 「デフォルトで安全」を提供する } Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 46
47.
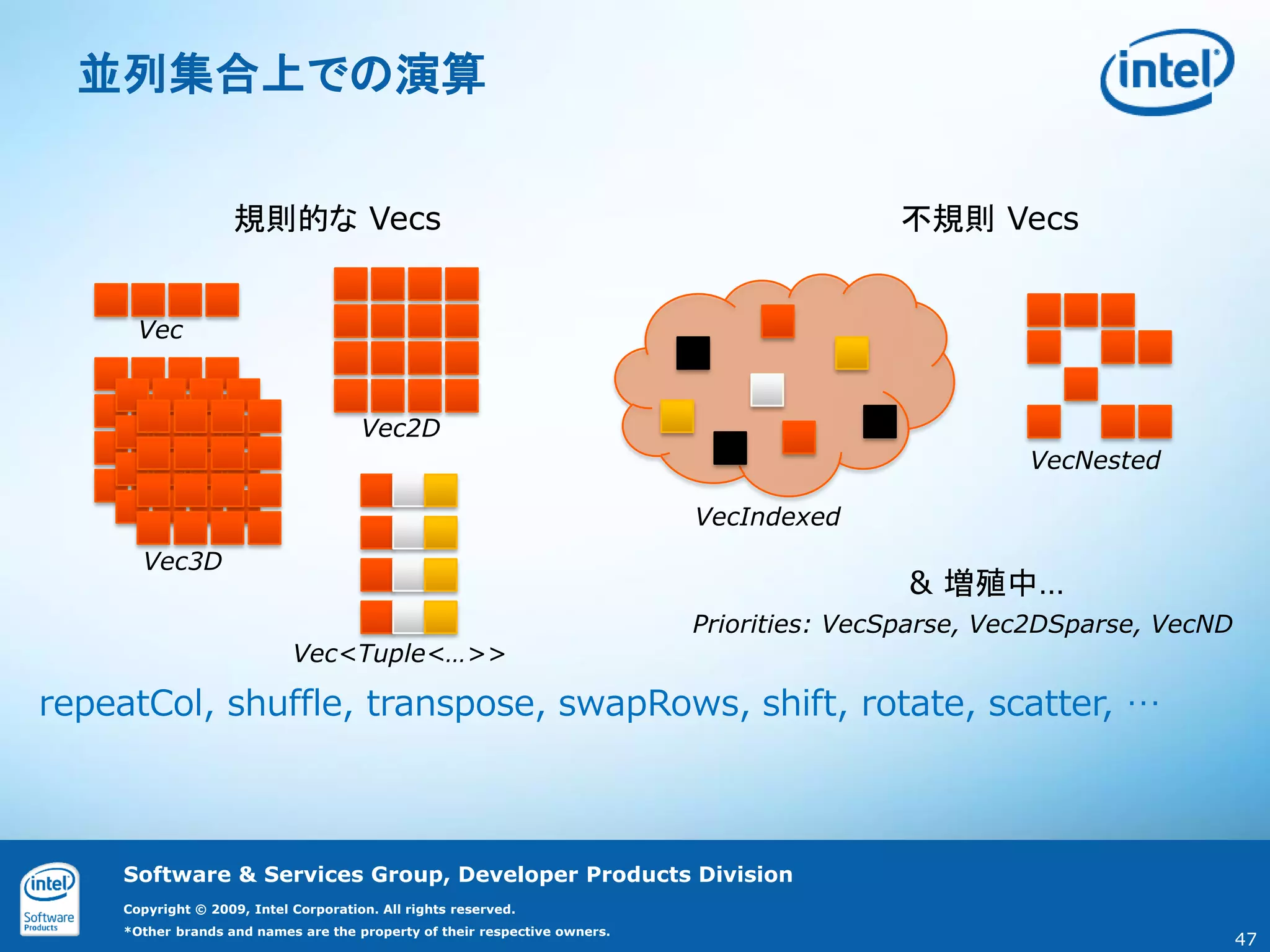
並列集合上での演算
規則的な Vecs 不規則 Vecs Vec Vec2D VecNested VecIndexed Vec3D & 増殖中… Priorities: VecSparse, Vec2DSparse, VecND Vec<Tuple<…>> repeatCol, shuffle, transpose, swapRows, shift, rotate, scatter, … Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 47
48.
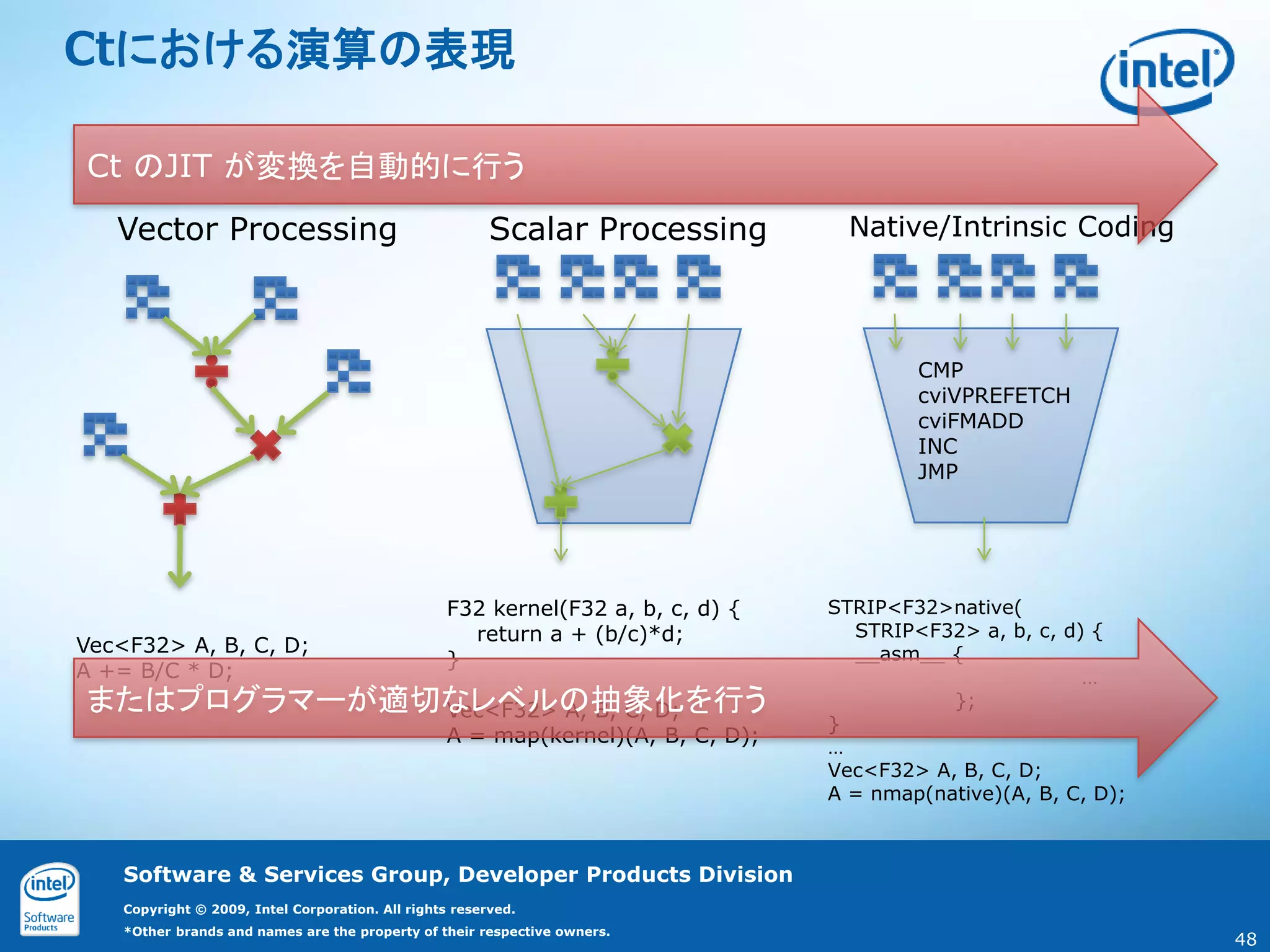
Ctにおける演算の表現 Ct のJIT が変換を自動的に行う
Vector Processing Scalar Processing Native/Intrinsic Coding CMP cviVPREFETCH cviFMADD INC JMP F32 kernel(F32 a, b, c, d) { STRIP<F32>native( return a + (b/c)*d; STRIP<F32> a, b, c, d) { Vec<F32> A, B, C, D; __asm__ { } A += B/C * D; … … またはプログラマーが適切なレベルの抽象化を行う Vec<F32> A, B, C, D; }; } A = map(kernel)(A, B, C, D); … Vec<F32> A, B, C, D; A = nmap(native)(A, B, C, D); Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 48
49.
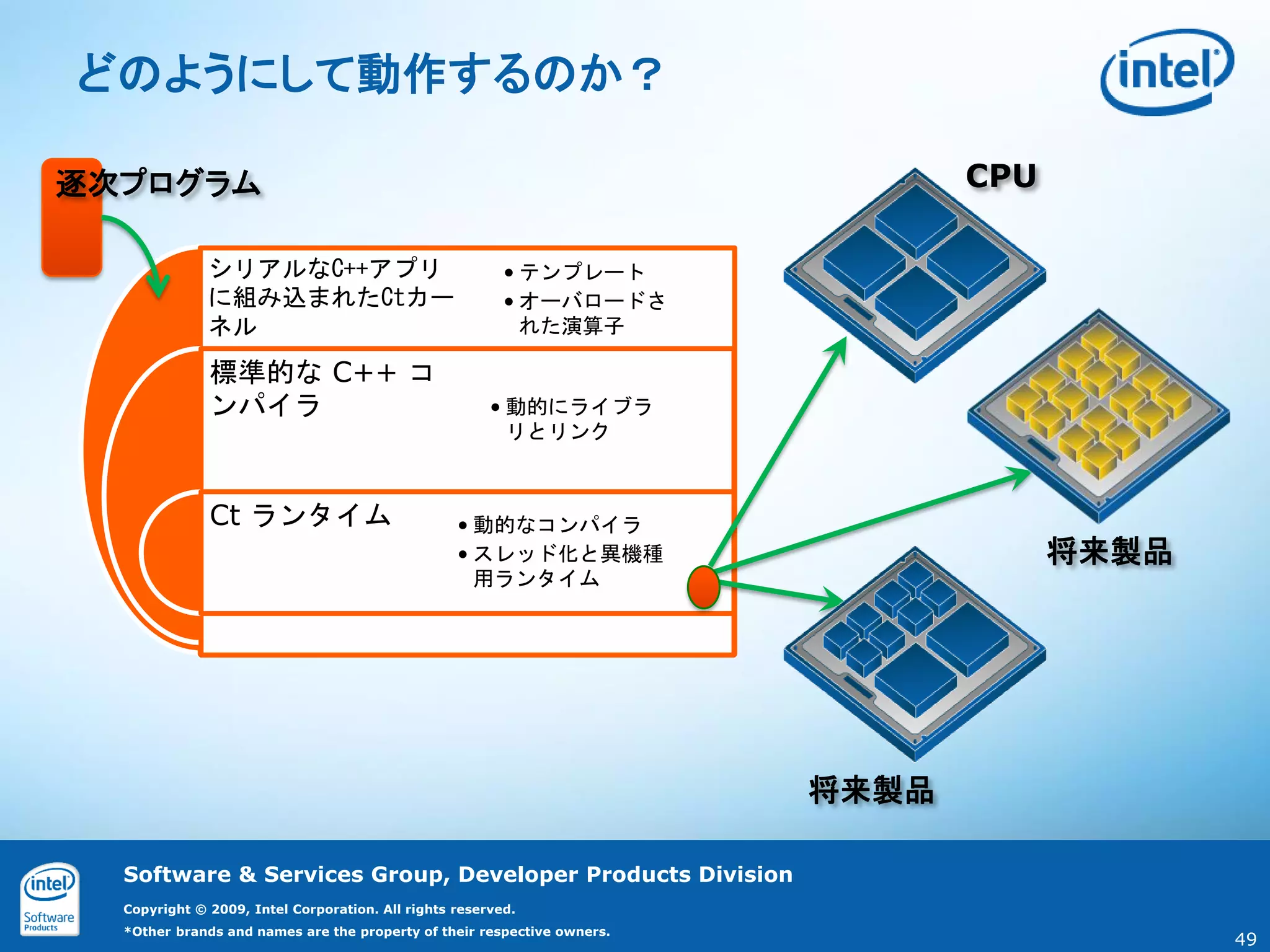
どのようにして動作するのか? 逐次プログラム
CPU シリアルなC++アプリ • テンプレート に組み込まれたCtカー • オーバロードさ ネル れた演算子 標準的な C++ コ ンパイラ • 動的にライブラ リとリンク Ct ランタイム • 動的なコンパイラ • スレッド化と異機種 将来製品 用ランタイム 将来製品 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 49
50.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] Vec<I32> va(ar_a, …); Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 50
51.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] Vec<I32> va(ar_a, …); Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); Memory Manager a b Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 51
52.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] Vec<I32> va(ar_a, …); IR Builder Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); void work( Vec<I32> a, Vec<I32> & b ) { b = a + 1; } Memory Manager a b Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 52
53.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] Vec<I32> va(ar_a, …); IR Builder Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); V1 1 + void work( Vec<I32> a, Vec<I32> & b ) { V2 b = a + 1; } Memory Manager a b Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 53
54.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] Trigger JIT IR Builder JIT Vec<I32> va(ar_a, …); V1 1 Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); + void work( Vec<I32> a, Vec<I32> & b ) V2 { b = a + 1; } Memory Manager a b Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 54
55.
Ct 動的処理実行 int ar_a[1024],
ar_b[1024] JIT が動作 IR Builder JIT Vec<I32> va(ar_a, …); ハイレベル最適化 V1 1 Vec<I32> vb(ar_b,…); rcall( work ) ( va, vb ); + ローレベル最適化 void work( Vec<I32> a, CVI コード生成 Vec<I32> & b ) V2 { b = a + 1; } SSE LNI AVX Memory Manager a b Ct 動的処理 エンジン Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 55
56.
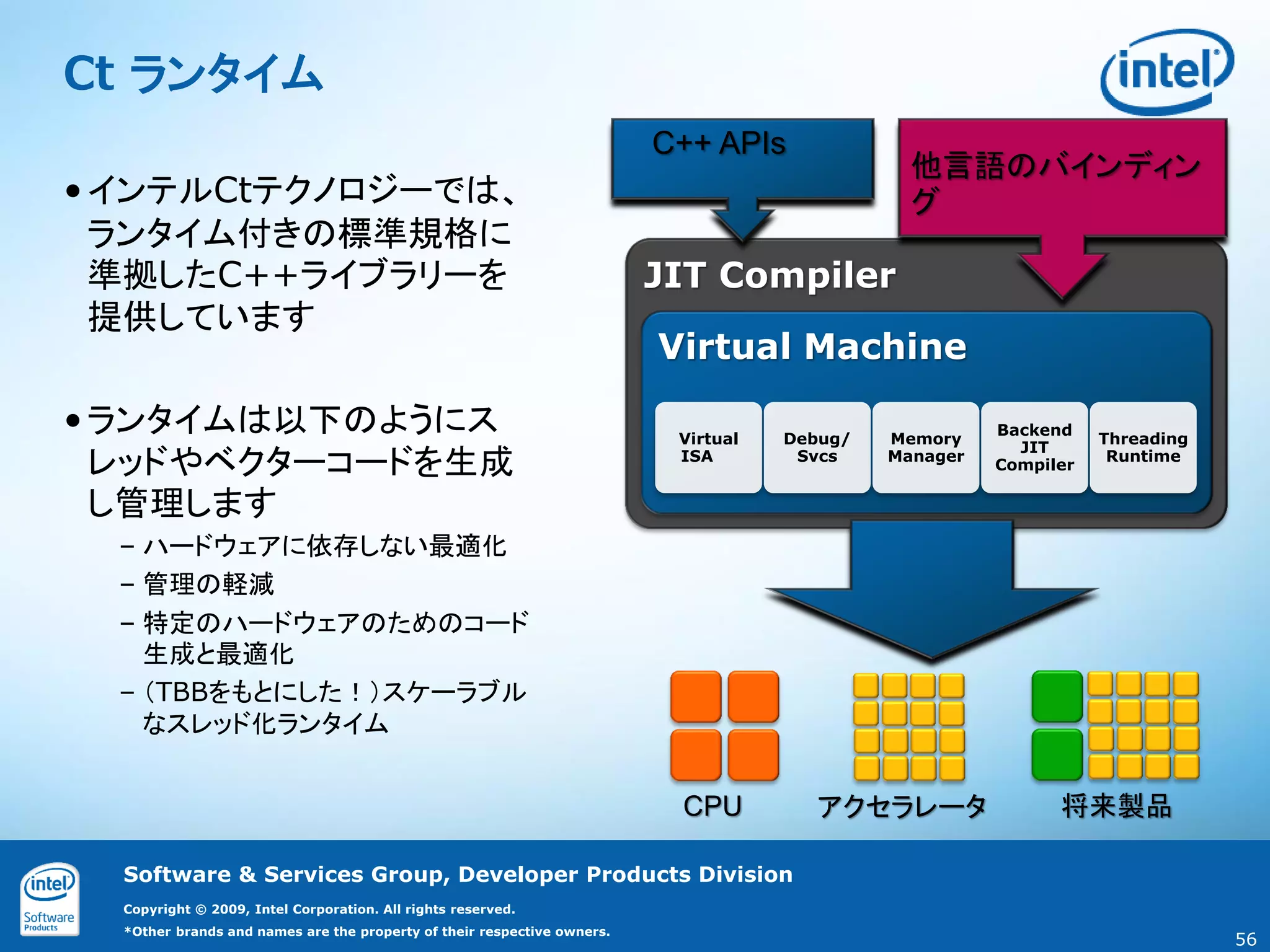
Ct ランタイム
Application C++ APIs 他言語のバインディン • インテルCtテクノロジーでは、 calling Ct APIs グ ランタイム付きの標準規格に 準拠したC++ライブラリーを JIT Compiler 提供しています Virtual Machine • ランタイムは以下のようにス Virtual Debug/ Memory Backend Threading JIT レッドやベクターコードを生成 ISA Svcs Manager Compiler Runtime し管理します – ハードウェアに依存しない最適化 – 管理の軽減 – 特定のハードウェアのためのコード 生成と最適化 – (TBBをもとにした!)スケーラブル なスレッド化ランタイム CPU アクセラレータ 将来製品 Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 56
57.
Ct 動的エンジンの意味 実行時に第2ステージのコンパイル
実行時に実装に特化できる Ct カーネル:C関数として存在するが、 • 1度だけ実行=>動的コンパイルのため • 演算を記号としてキャプチャーする • 現行のバインディングと状態のスナップショットを取 得する Ct コール:実行は遠隔関数コール • データフロー依存関係を察知 • 自動(そして常に安全な)同期 • 遠隔実行とデータ保存を可能に Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 57
58.
なぜこれが重要なのか? 広く使われているライブラリーほど、よくデザインされた 汎用的なインターフェースやモジュール化と引き換えにパ フォーマンスを妥協している – 仮想関数呼び出し、関数ポインター、そして制御フローはランタイ
ム時にしか分からないパラメーターに依存しており、パフォーマン スを制限しうる – モジュール性は本来的に様々な処理に分散してしまう – 極端なケースでは、アプリケーションは実行時に決められる計算を 適宜実行しているにすぎない 動的コンパイルは、「遅延結合」のオーバーヘッドを 「コンパイル・アウト」できる この利点によって、並列化を増大化させる作用がある Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 58
59.
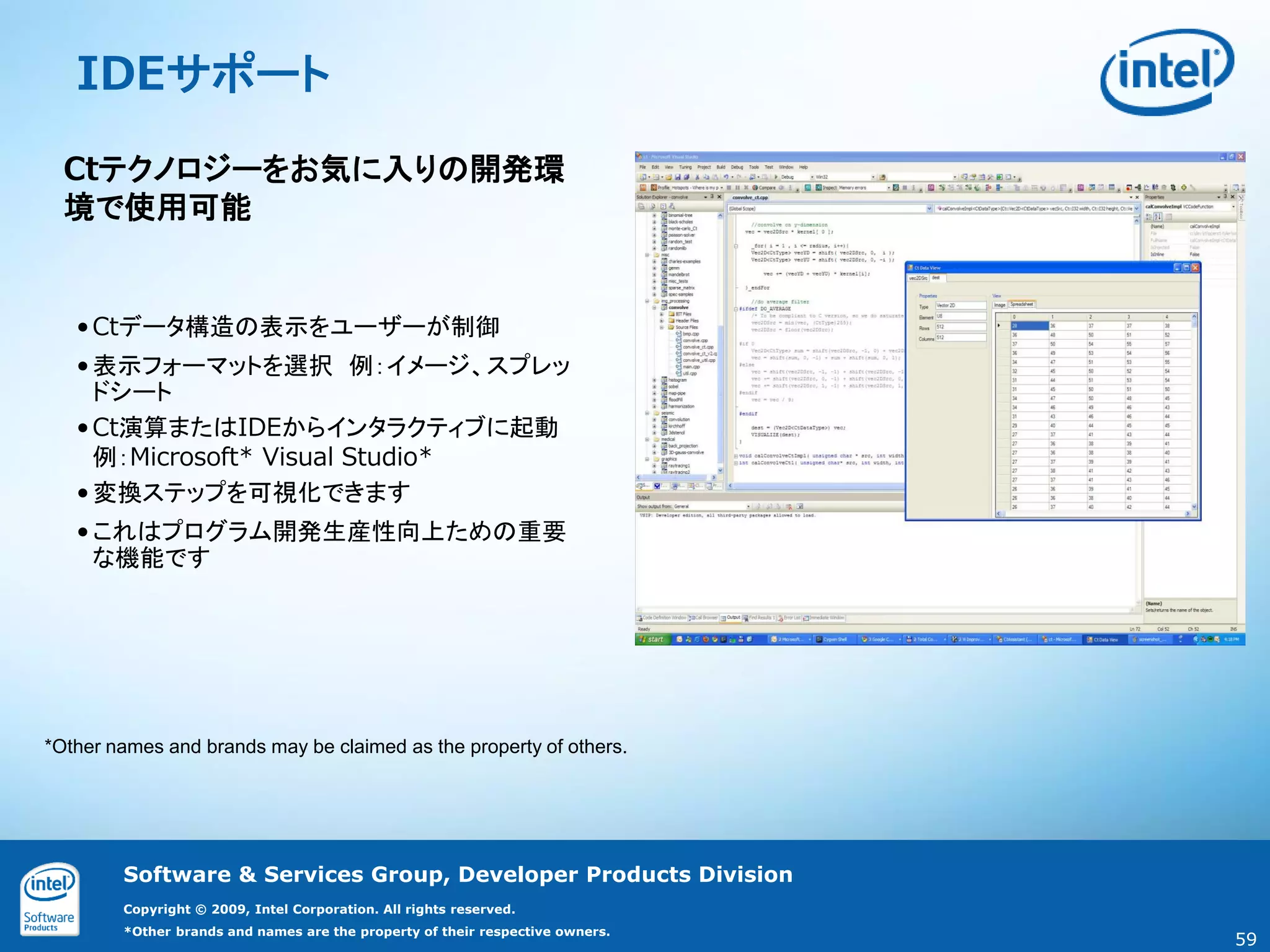
IDEサポート Ctテクノロジーをお気に入りの開発環
境で使用可能 • Ctデータ構造の表示をユーザーが制御 • 表示フォーマットを選択 例:イメージ、スプレッ ドシート • Ct演算またはIDEからインタラクティブに起動 例:Microsoft* Visual Studio* • 変換ステップを可視化できます • これはプログラム開発生産性向上ための重要 な機能です *Other names and brands may be claimed as the property of others. Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 59
60.
まとめ • Ct テクノロジーはマルチコアへのアクセスを容易にし、
データ並列化のアプリケーションのための異機種環境で のメニーコア並列化を容易にします • 逐次セマンティックスは並列プログラミングする負担を 軽減します • 「デフォルトで安全」によって、悩ましいデータレース やデッドロックを回避できます • 今日、Ctテクノロジーで書かれたコードは、新しくリ リースされるメニーコア・プロセッサー上でもスケール する(フォワード・スケーリング) Software & Services Group, Developer Products Division Copyright © 2009, Intel Corporation. All rights reserved. *Other brands and names are the property of their respective owners. 60
Download

![インテル® Parallel Composer
OpenMPに対するKeyWord の拡張
OpenMP 3.0 のtask 機能を簡易表記で利用するこ
とが可能
__taskcomplete {
__task f_sum(500, a, b, c);
__task f_sum(500, a+500, b+500, c+500);
}
void f_sum ( int length, int *a, int *b, int *c ) {
int i;
__par for (i=0; i<length; i++) {
c[i] = a[i] + b[i]; データ並列
} アルゴリズムに利用
}
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners. 2009/12/5](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-16-2048.jpg)




![Ct vs. SSE 組み込み関数
#define NCO 4 fptype * strike, fptype * rate, fptype * volatility,
fptype * time, int * otype, float timet)
#if (NCO==2) {
#define fptype double int i;
#define SIMD_WIDTH 2 // local private working variables for the calculation
#define _MMR __m128d _MMR xStockPrice;
#define _MM_LOAD _mm_load_pd _MMR xStrikePrice;
#define _MM_STORE _mm_store_pd _MMR xRiskFreeRate;
#define _MM_MUL _mm_mul_pd _MMR xVolatility;
#define _MM_ADD _mm_add_pd _MMR xTime;
#define _MM_SUB _mm_sub_pd _MMR xSqrtTime;
#define _MM_DIV _mm_div_pd
#define _MM_SQRT _mm_sqrt_pd _MM_ALIGN16 fptype logValues[NCO];
#define _MM_SET(A) _mm_set_pd(A,A) _MMR xLogTerm;
#define _MM_SETR _mm_set_pd _MMR xD1, xD2;
#endif _MMR xPowerTerm;
_MMR xDen;
#if (NCO==4) _MM_ALIGN16 fptype d1[SIMD_WIDTH];
#define fptype float _MM_ALIGN16 fptype d2[SIMD_WIDTH];
#define SIMD_WIDTH 4 _MM_ALIGN16 fptype FutureValueX[SIMD_WIDTH];
#define _MMR __m128 _MM_ALIGN16 fptype NofXd1[SIMD_WIDTH];
#define _MM_LOAD _mm_load_ps _MM_ALIGN16 fptype NofXd2[SIMD_WIDTH];
#define _MM_STORE _mm_store_ps _MM_ALIGN16 fptype NegNofXd1[SIMD_WIDTH];
#define _MM_MUL _mm_mul_ps _MM_ALIGN16 fptype NegNofXd2[SIMD_WIDTH];
#define _MM_ADD _mm_add_ps
#define _MM_SUB _mm_sub_ps xStockPrice = _MM_LOAD(sptprice);
#define _MM_DIV _mm_div_ps xStrikePrice = _MM_LOAD(strike);
template <typename T> #define _MM_SQRT _mm_sqrt_ps xRiskFreeRate = _MM_LOAD(rate);
Vec<T> CND(Vec<T> x) #define _MM_SET(A) _mm_set_ps(A,A,A,A) xVolatility = _MM_LOAD(volatility);
{ #define _MM_SETR _mm_set_ps xTime = _MM_LOAD(time);
Vec<T> l = abs(x); #endif
Vec<T> k = 1.0f / ( 1.0f + 0.2316419f * l); xSqrtTime = _MM_SQRT(xTime);
__forceinline void CNDF ( fptype * OutputX, fptype * InputX )
Vec<T> w = { for(i=0; i<SIMD_WIDTH;i ++) {
0.31938153f * k - _MM_ALIGN16 int sign[SIMD_WIDTH]; logValues[i] = log(sptprice[i] / strike[i]);
0.356563782f * k * k + int i; }
1.781477937f * k * k * k - _MMR xInput;
1.821255978f * k * k * k * k + _MMR xNPrimeofX; xLogTerm = _MM_LOAD(&(logValues[0]));
1.330274429f * k * k * k * k * k; _MM_ALIGN16 fptype expValues[SIMD_WIDTH];
_MMR xK2; xPowerTerm = _MM_MUL(xVolatility, xVolatility);
w = w * inv_sqrt_2xPI * exp(l * l * -0.5f); _MMR xK2_2, xK2_3, xK2_4, xK2_5; xPowerTerm = _MM_MUL(xPowerTerm, _MM_SET(0.5));
w = select(x > 0, 1.0f - w, w); _MMR xLocal, xLocal_1, xLocal_2, xLocal_3; // xPowerTerm = _mm_div_pd(xPowerTerm, _MM_SET(2.0,
Ct SSE
return w; 2.0));
} for (i=0; i<SIMD_WIDTH; i++) {
// Check for negative value of InputX xD1 = _MM_ADD(xRiskFreeRate, xPowerTerm);
template <typename T> if (InputX[i] < 0.0) { xD2 = _MM_SUB(xRiskFreeRate, xPowerTerm);
void ctBlackScholesKern(Vec<T> s, InputX[i] = -InputX[i];
Vec<T> x, sign[i] = 1; xD1 = _MM_MUL(xD1, xTime);
Vec<T> r, } else xD2 = _MM_MUL(xD2, xTime);
Vec<T> v, sign[i] = 0;
Vec<T> t, } xD1 = _MM_ADD(xD1, xLogTerm);
Vec<T>& result) xD2 = _MM_ADD(xD2, xLogTerm);
{ xInput = _MM_LOAD(InputX);
Vec<T> sqrt_value = v * sqrt(t); xDen = _MM_MUL(xVolatility, xSqrtTime);
Vec<T> d1 = ln(s / x) + (r + v * v * 0.5f ) * t) / sqrt_value; // Compute NPrimeX term common to both four & six decimal xD1 = _MM_DIV(xD1, xDen);
Vec<T> d2 = d1 - sqrt_value; accuracy calcs // VL: 10/15/06. An optimization is not to recompute xD2, but to
for (i=0; i<SIMD_WIDTH; i++) { derive it from xD1
result = x * exp(0f - r * t) * (1.0f - CND(d2)) + (-s) * (1.0 - CND(d1)); expValues[i] = exp(-0.5f * InputX[i] * InputX[i]); // xD2 = _MM_DIV(xD2, xDen);
} // printf("exp[%d]: %f¥n", i, expValues[i]); xD2 = _MM_SUB(xD1, xDen);
}
_MM_STORE(d1, xD1);
template <typename T> xNPrimeofX = _MM_LOAD(expValues); _MM_STORE(d2, xD2);
void ctBlackScholes(T *option_price, int num_options, xNPrimeofX = _MM_MUL(xNPrimeofX,
T *stkprice, T *strike, T *rate, T *volatility, _MM_SET(inv_sqrt_2xPI)); CNDF( NofXd1, d1 );
T *time) CNDF( NofXd2, d2 );
{ xK2 = _MM_MUL(_MM_SET((fptype)0.2316419), xInput);
Vec<T> s(stkprice, num_options); xK2 = _MM_ADD(xK2, _MM_SET((fptype)1.0)); for (i=0; i<SIMD_WIDTH; i++) {
Vec<T> x(strike, num_options); xK2 = _MM_DIV(_MM_SET((fptype)1.0), xK2); FutureValueX[i] = strike[i] * (exp(-(rate[i])*(time[i])));
Vec<T> r(rate, num_options); // xK2 = _mm_rcp_pd(xK2); // No rcp function for double-
Vec<T> v(volatility, num_options); precision NegNofXd1[i] = ((fptype)1.0 - (NofXd1[i]));
Vec<T> t(time, num_options); NegNofXd2[i] = ((fptype)1.0 - (NofXd2[i]));
Vec<T> result(option_price, num_options); xK2_2 = _MM_MUL(xK2, xK2); OptionPrice[i] = (FutureValueX[i] * NegNofXd2[i]) -
rcall( ctBlackScholesKern<T> )( s,x,r,v,t,result ); xK2_3 = _MM_MUL(xK2_2, xK2); (sptprice[i] * NegNofXd1[i]);
} xK2_4 = _MM_MUL(xK2_3, xK2); }
xK2_5 = _MM_MUL(xK2_4, xK2); }
xLocal_1 = _MM_MUL(xK2, _MM_SET((fptype)0.319381530)); void sseBlackScholes(fptype *option_price,
xLocal_2 = _MM_MUL(xK2_2, _MM_SET((fptype)- int num_options,
42 lines
0.356563782)); fptype *stkprice,
xLocal_3 = _MM_MUL(xK2_3, fptype *strike,
_MM_SET((fptype)1.781477937)); fptype *rate,
xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); fptype *volatility,
xLocal_3 = _MM_MUL(xK2_4, _MM_SET((fptype)- fptype *time)
1.821255978)); {
• ベクトル化
xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); for (int i = 0; i < num_options; i += NCO) {
xLocal_3 = _MM_MUL(xK2_5, // Calling main function to calculate option value based on
_MM_SET((fptype)1.330274429)); Black & Sholes's
xLocal_2 = _MM_ADD(xLocal_2, xLocal_3); // equation.
BlkSchlsEqEuroNoDiv(&(option_price[i]), NCO, &(stkprice[i]),
xLocal_1 = _MM_ADD(xLocal_2, xLocal_1); &(strike[i]),
• スレッド化
xLocal = _MM_MUL(xLocal_1, xNPrimeofX); &(rate[i]), &(volatility[i]), &(time[i]),
xLocal = _MM_SUB(_MM_SET((fptype)1.0), xLocal); NULL/*&(otype[i])*/, 0);
}
_MM_STORE(OutputX, xLocal); }
186 lines
// _mm_storel_pd(&OutputX[0], xLocal);
// _mm_storeh_pd(&OutputX[1], xLocal);
• マシン非依存
for (i=0; i<SIMD_WIDTH; i++) {
if (sign[i]) {
OutputX[i] = ((fptype)1.0 - OutputX[i]);
• ベクトル化
}
}
}
void BlkSchlsEqEuroNoDiv (fptype * OptionPrice, int numOptions,
fptype * sptprice,
• 非 スレッド化
• マシン依存
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
35](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-35-2048.jpg)


![集合オブジェクト
Vecは基本的な並列集合オブジェ #include "ct.h“
using namespace Ct;
クト型
• 値に対する呼び名 int main(int argc, char *argv[])
{
• ランタイムによって管理される // A Vec declaration must specify a base
• フラット、複数次元、または不規
// type: Vec<basetype> aTypedVector;
則な入れ子 // For example, DoubleVec can refer to any
// vector of doubles.
• API を介して排他的に生成そして Vec<F64> DoubleVec;
操作される
// A regular 2 dimensional vector:
–決定性と分離 Vec2D<I8> 2DMatrix (“{{0,1,2}, {3,4,5},
{6,7,8}}”);
–パフォーマンス追及のために上書きや
直接操作
//An irregularly nested vector:
VecNested<I32> IrregularVector (“{{0,1,2},
{3,4}, {5,6,7,8}}”);
return 0;
「デフォルトで安全」を提供する }
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
46](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-46-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024]
Vec<I32> va(ar_a, …);
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
50](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-50-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024]
Vec<I32> va(ar_a, …);
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
Memory Manager
a
b
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
51](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-51-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024]
Vec<I32> va(ar_a, …);
IR Builder
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
void work( Vec<I32> a,
Vec<I32> & b )
{
b = a + 1;
}
Memory Manager
a
b
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
52](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-52-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024]
Vec<I32> va(ar_a, …);
IR Builder
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
V1 1
+
void work( Vec<I32> a,
Vec<I32> & b )
{ V2
b = a + 1;
}
Memory Manager
a
b
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
53](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-53-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024] Trigger JIT
IR Builder JIT
Vec<I32> va(ar_a, …);
V1 1
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
+
void work( Vec<I32> a,
Vec<I32> & b )
V2
{
b = a + 1;
}
Memory Manager
a
b
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
54](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-54-2048.jpg)
![Ct 動的処理実行
int ar_a[1024], ar_b[1024] JIT が動作
IR Builder JIT
Vec<I32> va(ar_a, …); ハイレベル最適化
V1 1
Vec<I32> vb(ar_b,…);
rcall( work ) ( va, vb );
+ ローレベル最適化
void work( Vec<I32> a, CVI コード生成
Vec<I32> & b )
V2
{
b = a + 1;
} SSE LNI AVX
Memory Manager
a
b
Ct 動的処理
エンジン
Software & Services Group, Developer Products Division
Copyright © 2009, Intel Corporation. All rights reserved.
*Other brands and names are the property of their respective owners.
55](https://image.slidesharecdn.com/vsugctshr-091205174420-phpapp02/75/Parallel-Technology-55-2048.jpg)