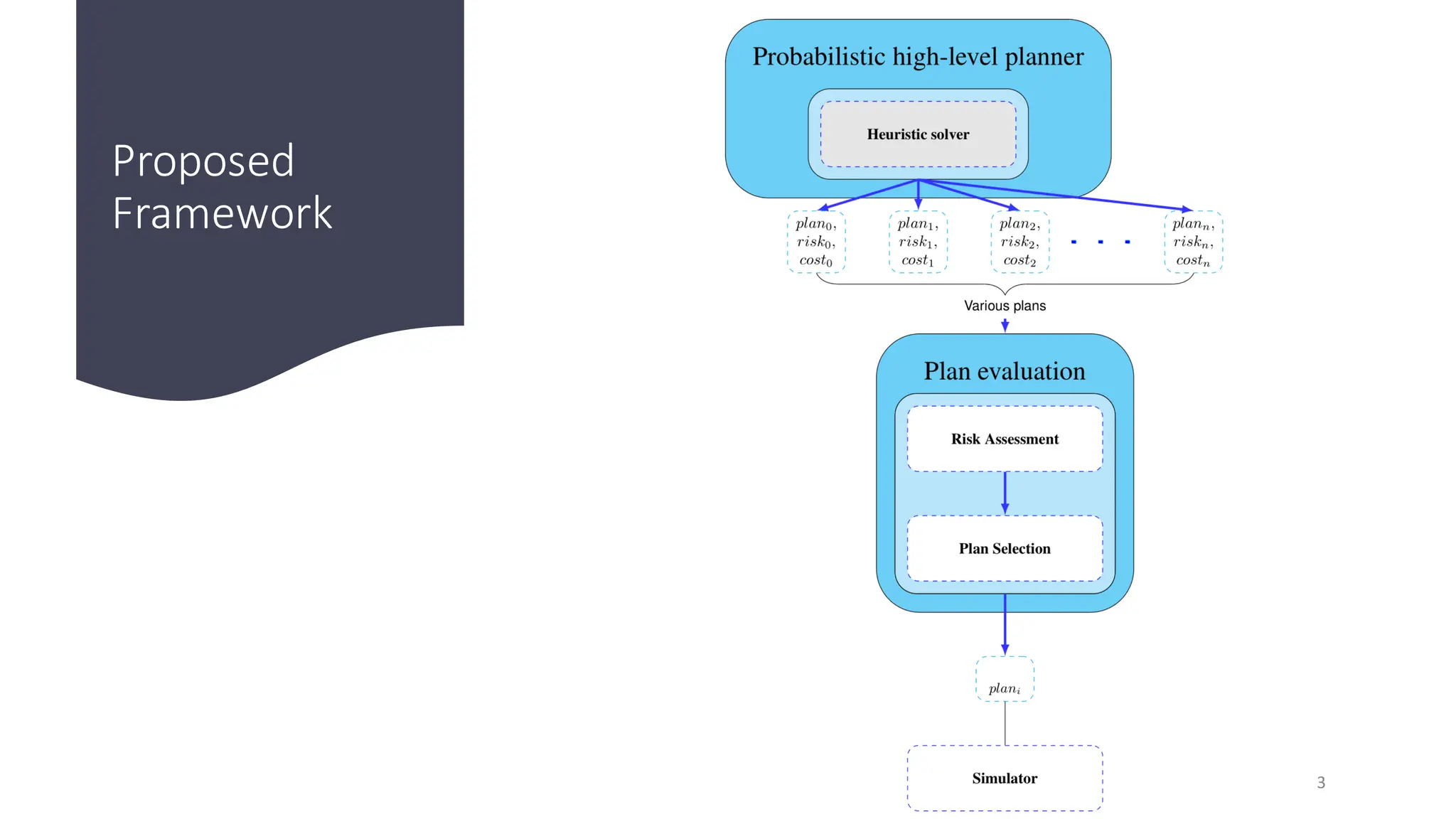
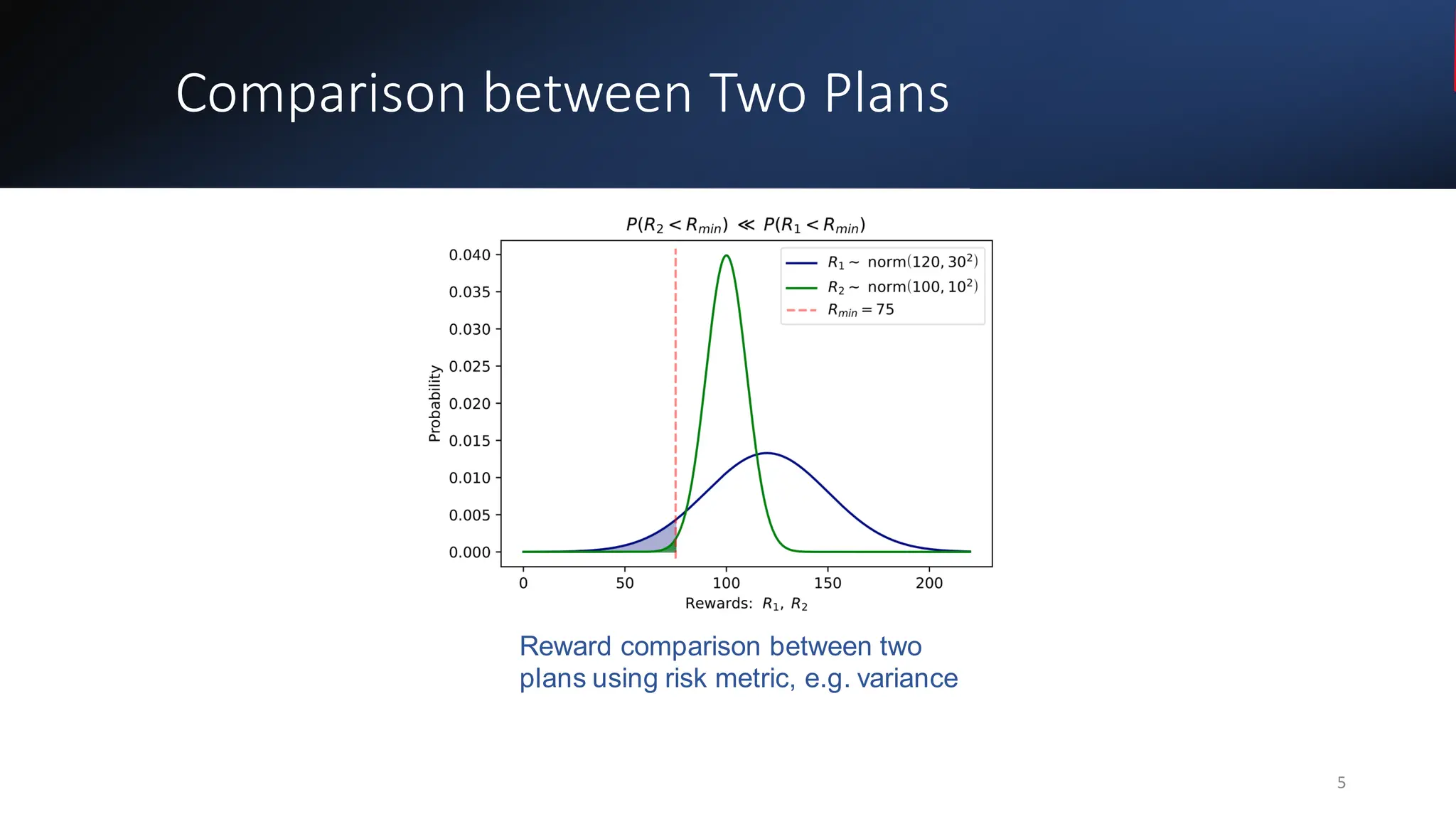
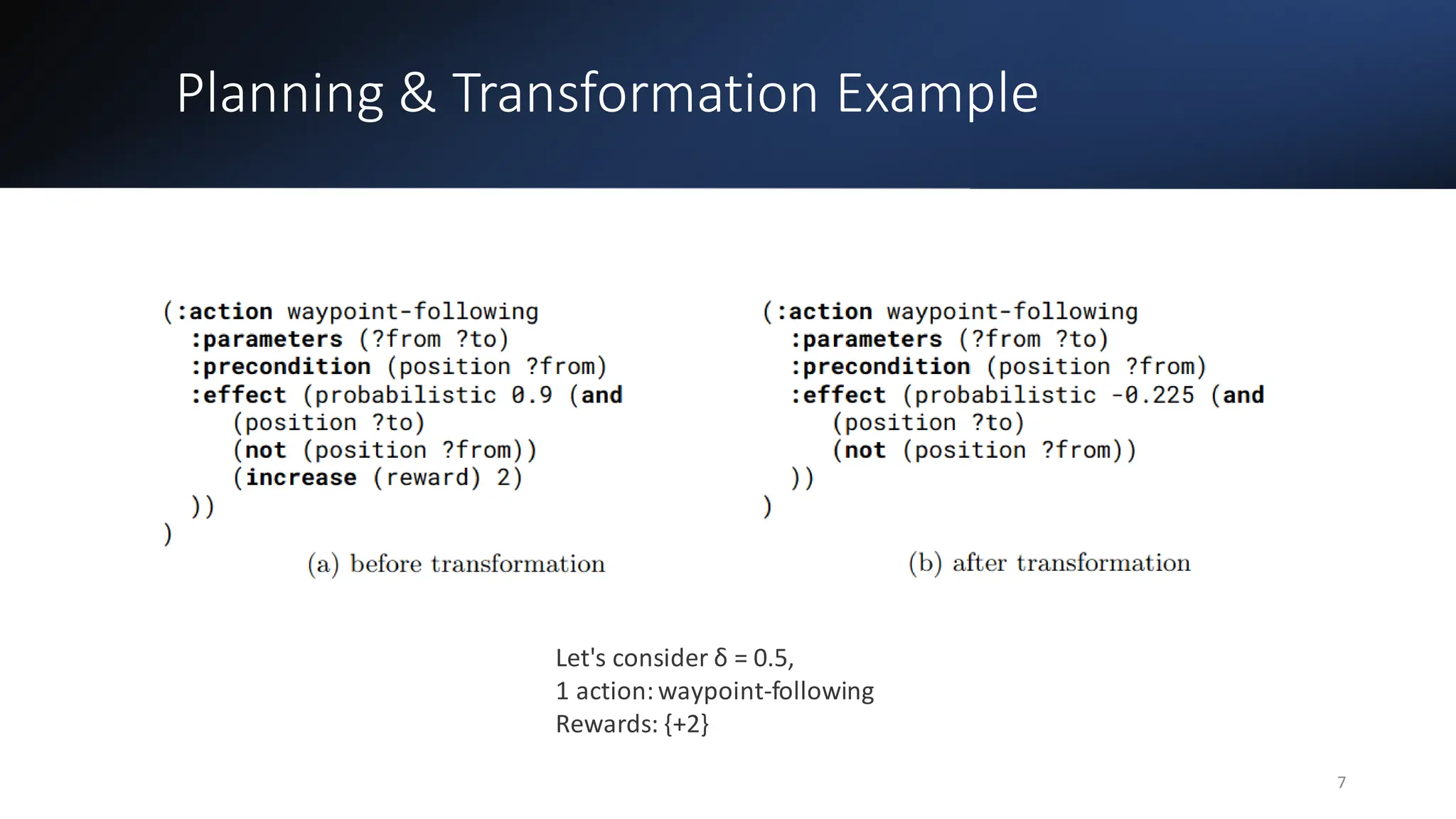
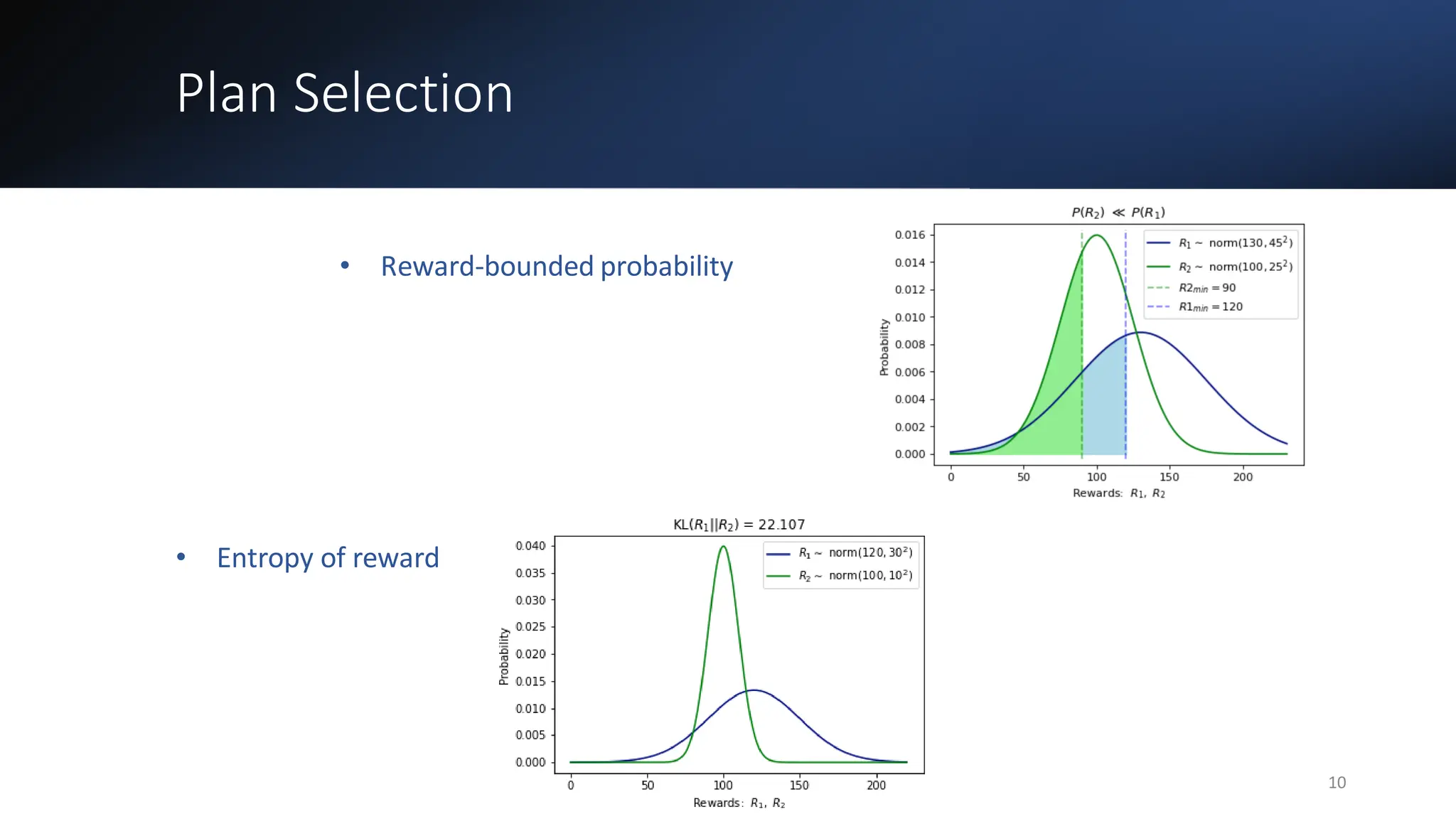
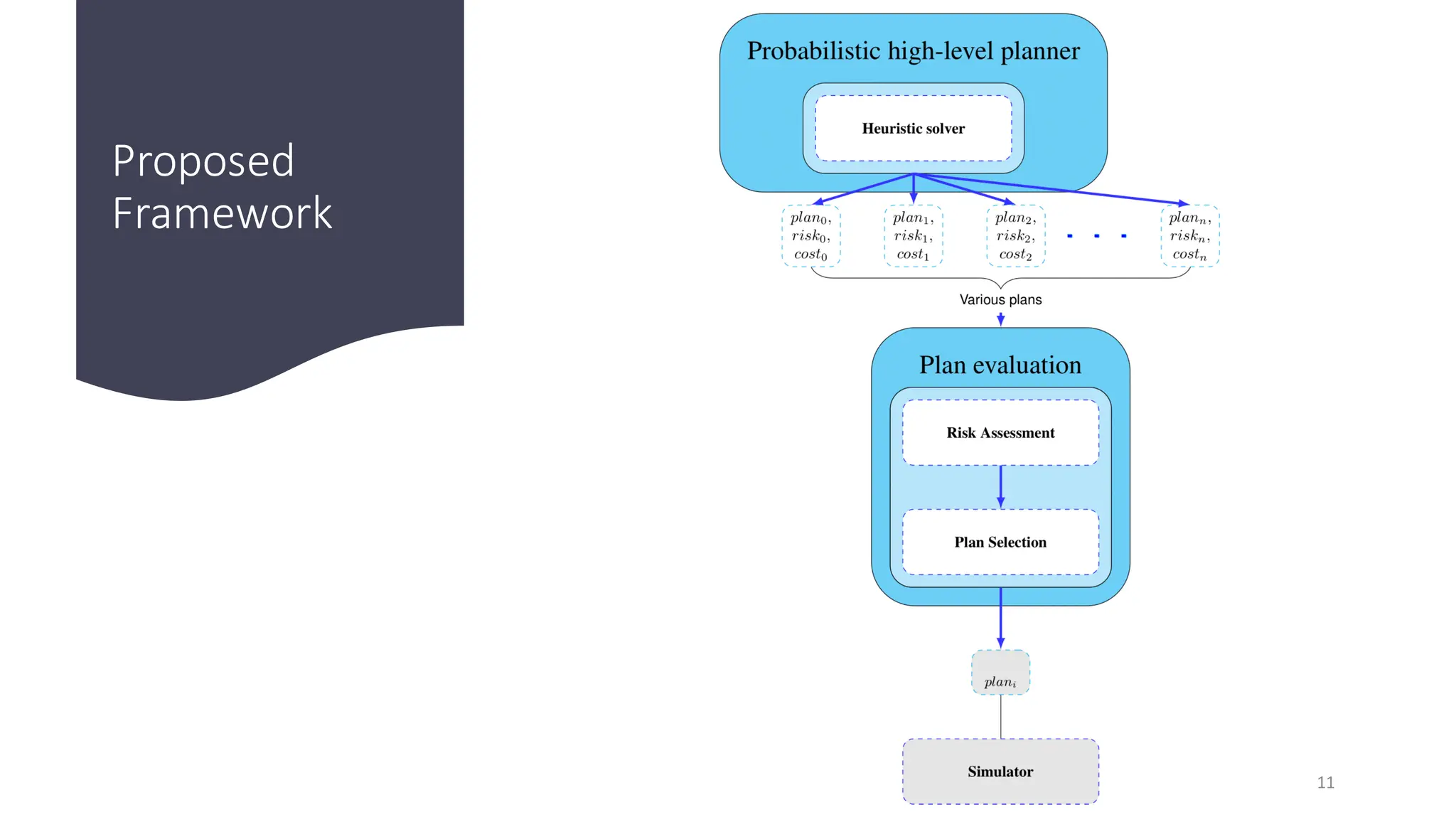
The presentation discusses a framework for reliable plan selection that incorporates risk sensitivity, inspired by existing research on reactive planners. It proposes a method to model Markov Decision Processes (MDPs) using a risk-averse utility function, analyzing plan effectiveness by considering both expected rewards and variances in uncertain environments. Future work aims to integrate this risk-sensitive planning into probabilistic planners and evaluate generated strategies using the new metrics.