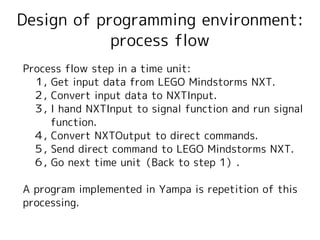
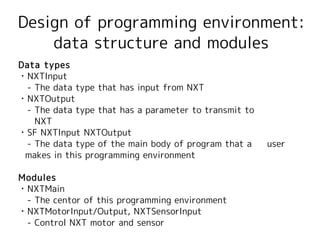
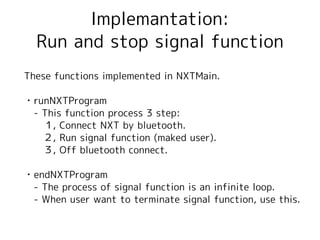
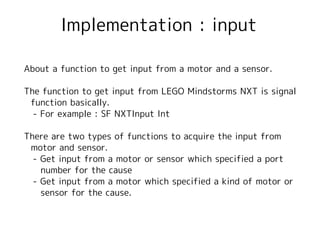
This document describes the development of a programming environment for controlling LEGO Mindstorms NXT robots using the functional reactive programming (FRP) language Yampa. It discusses the reactive programming and FRP concepts used. The programming environment takes input from sensors and sends output to motors via defined data types and modules. The core runs a signal function in a repeating time-based process to dynamically react to inputs over time. Functions were implemented for running, stopping, and interfacing with the NXT inputs and outputs to build a basic but usable programming tool.






![Introducing JPNAP operation tools by Ko Togashi [APRICOT 2015]](https://cdn.slidesharecdn.com/ss_thumbnails/lightningtalkjpnap-final1425516291-150304224022-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)