Download to read offline



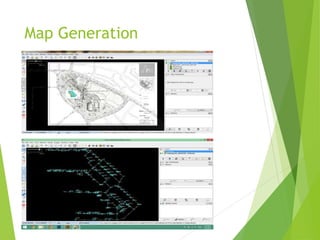


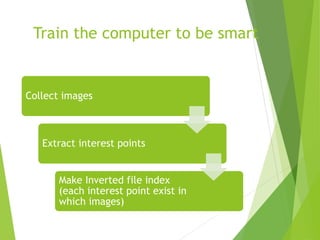
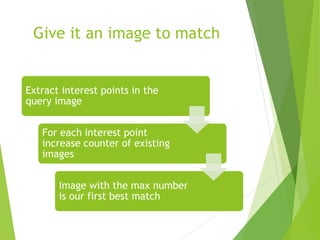






This document summarizes a project to develop an indoor navigation application called "Inigator" that uses image matching to locate a user and guide them to their destination on a map. Key aspects discussed include using a database of images and locations, finding the shortest path for navigation, challenges of image matching and scaling, and plans for future improvements to the system such as automatic image collection and outdoor GPS.











































