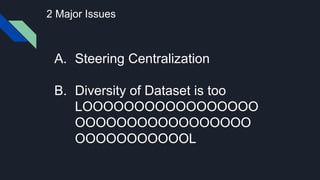
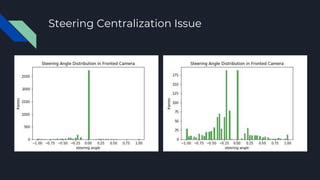
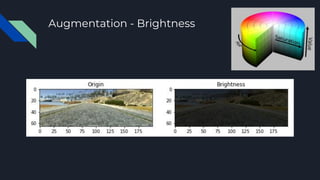
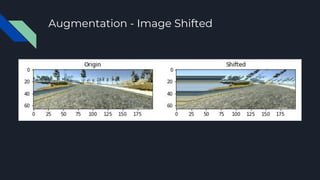
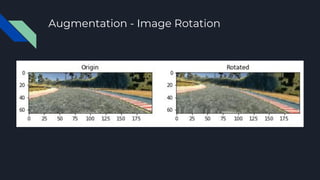
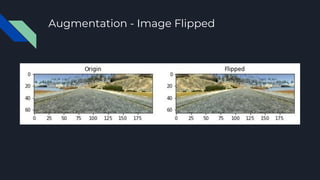
This document discusses building an autonomous vehicle simulator. It provides links to resources on behavioral cloning and the mechanism of self-driving cars. It also outlines two major issues with behavioral cloning: steering centralization and lack of diversity in datasets. It recommends addressing these issues through data augmentation and an end-to-end model to enable trying a first self-driving simulation.







![Model
M. Bojarski et al., "End to end learning for self-driving cars" in , 2016,
[online] Available: https://arxiv.org/abs/1604.07316.](https://image.slidesharecdn.com/180716talk-selfdrivingcar-180716140642/85/TaiwanR_Talk_self-driving-car-14-320.jpg)










































![[DSC Europe 25] Andrzej Kowalczyk - AI - how to start small and grow in the f...](https://cdn.slidesharecdn.com/ss_thumbnails/oy1zmo94qv6vpcqjvno2-andrzej-kowalczyk-ai-how-to-start-small-and-grow-in-the-future-1-260119121559-cf093b23-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DSC Europe 25] Slobodan Dolinic - Smart and Intelligent Green Region.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/0bribinjsp6ghwtvsvor-2-sigre-slobodan-dolinic-260115093812-c9c10e90-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Ivan Lukovic & Marija Djukic - From Data to Value: Why Maturi...](https://cdn.slidesharecdn.com/ss_thumbnails/ahrfps8xr6knowwhacxh-1-ivan-marija-dsc-2025-ld-v1-presentation-260115093812-be21adfc-thumbnail.jpg?width=640&height=640&fit=bounds)




