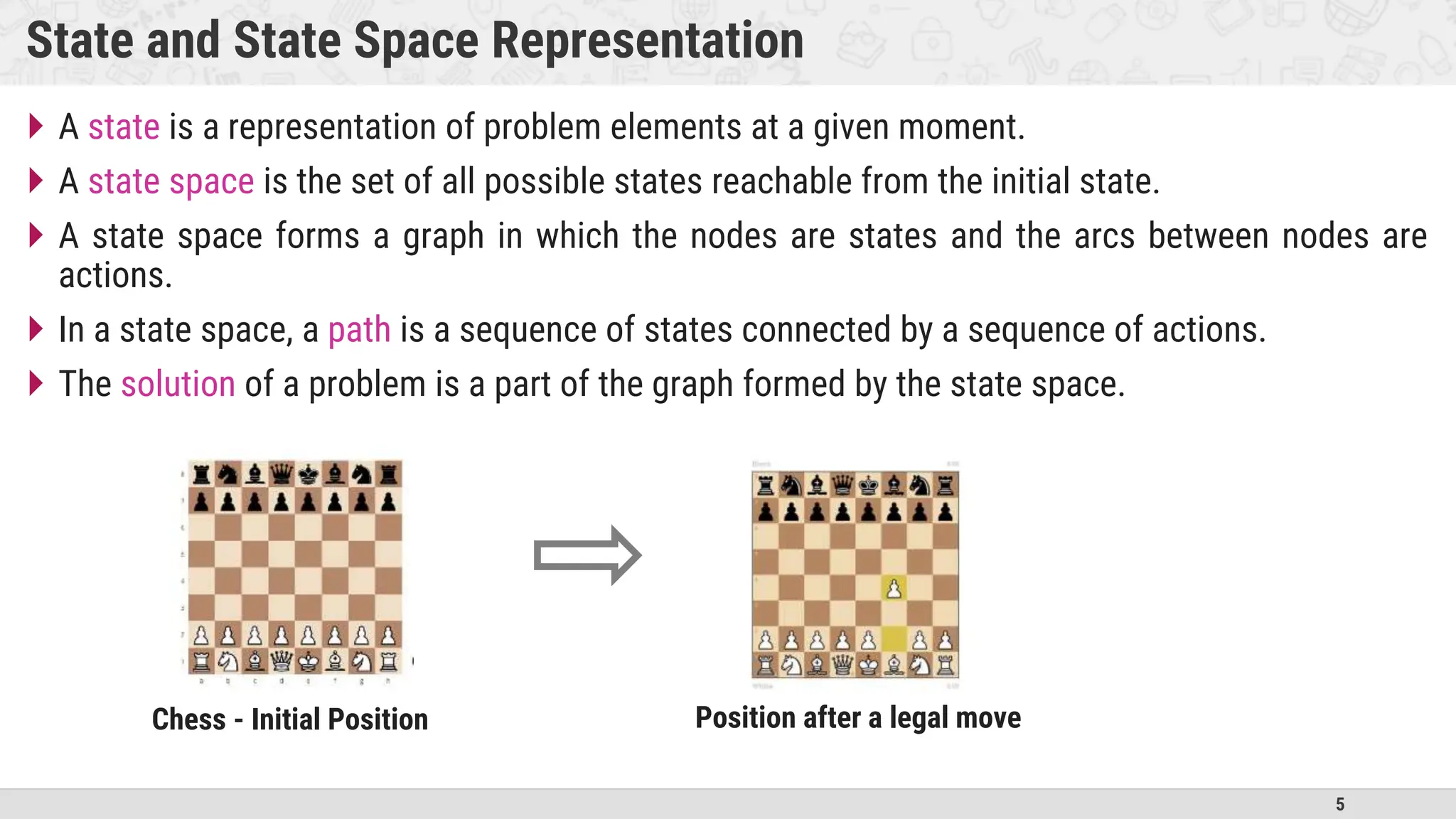
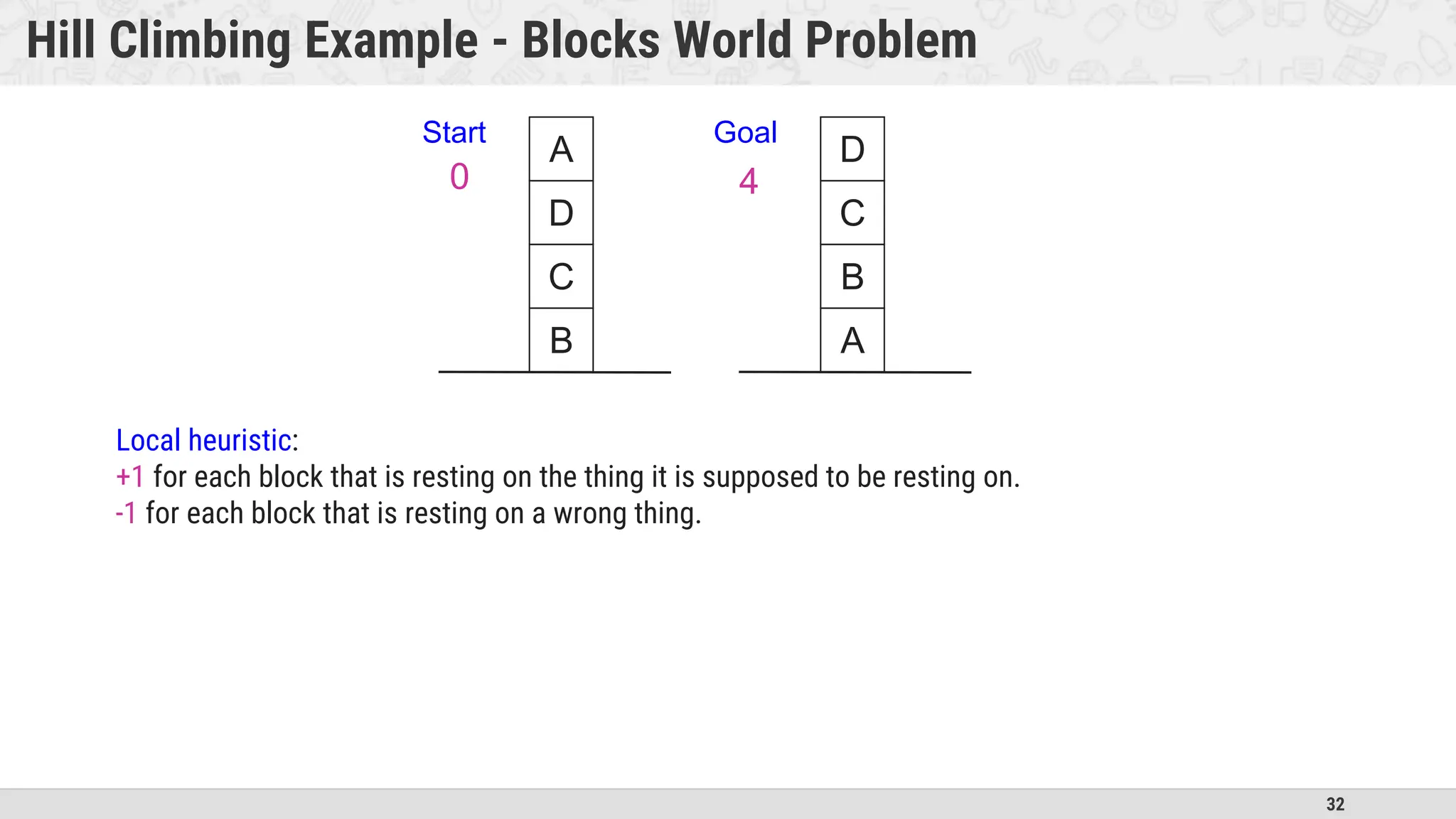
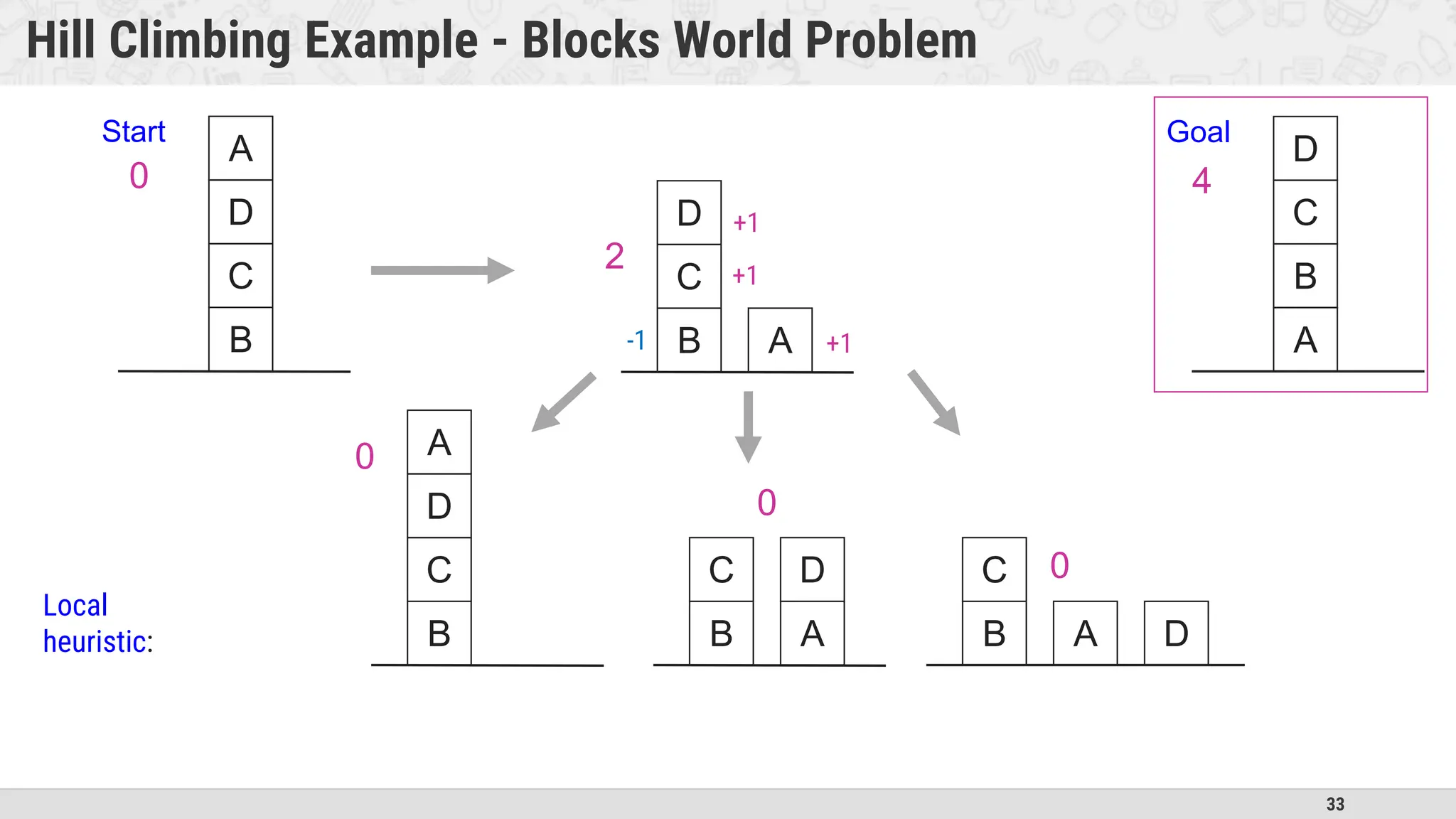
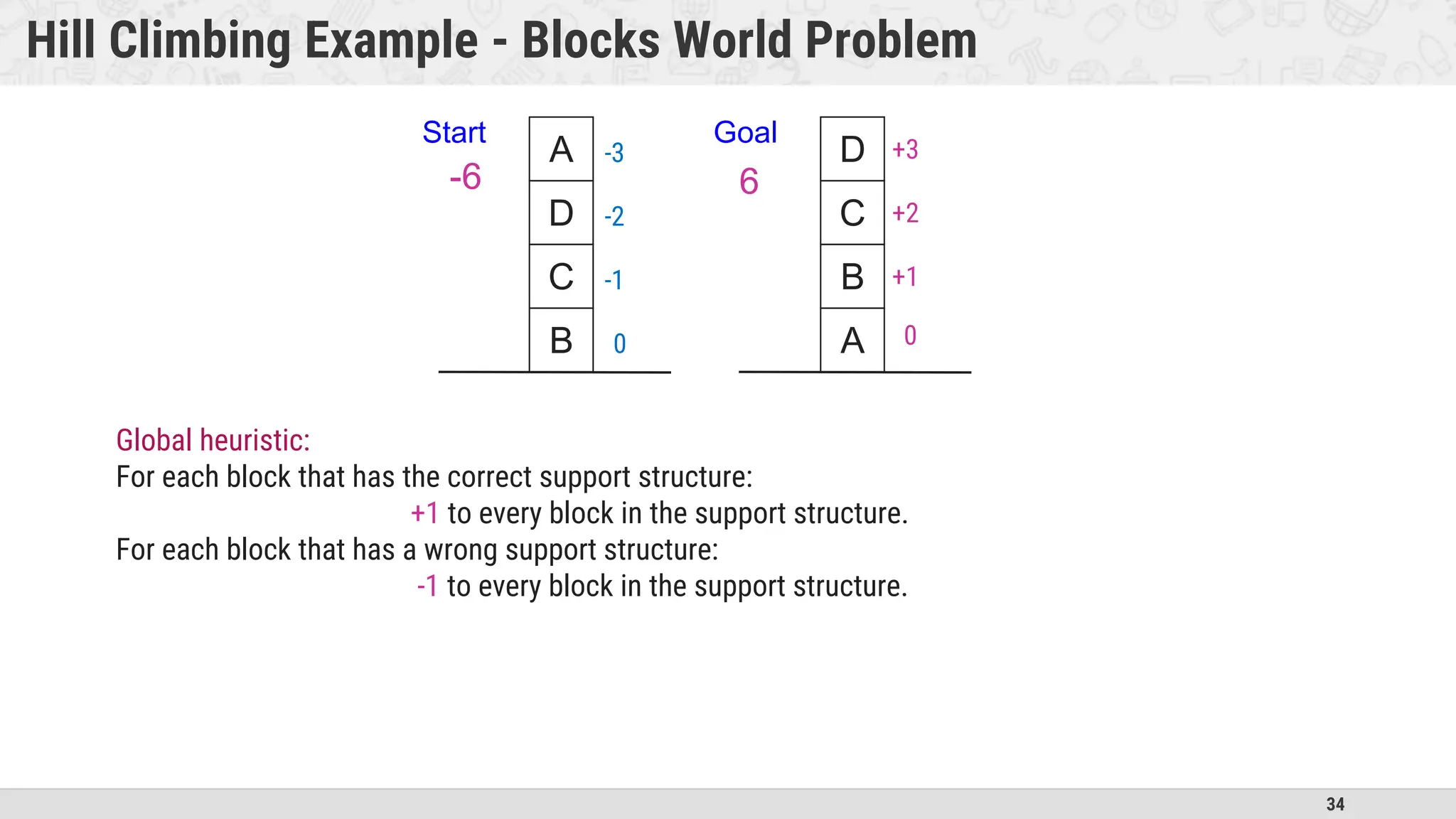
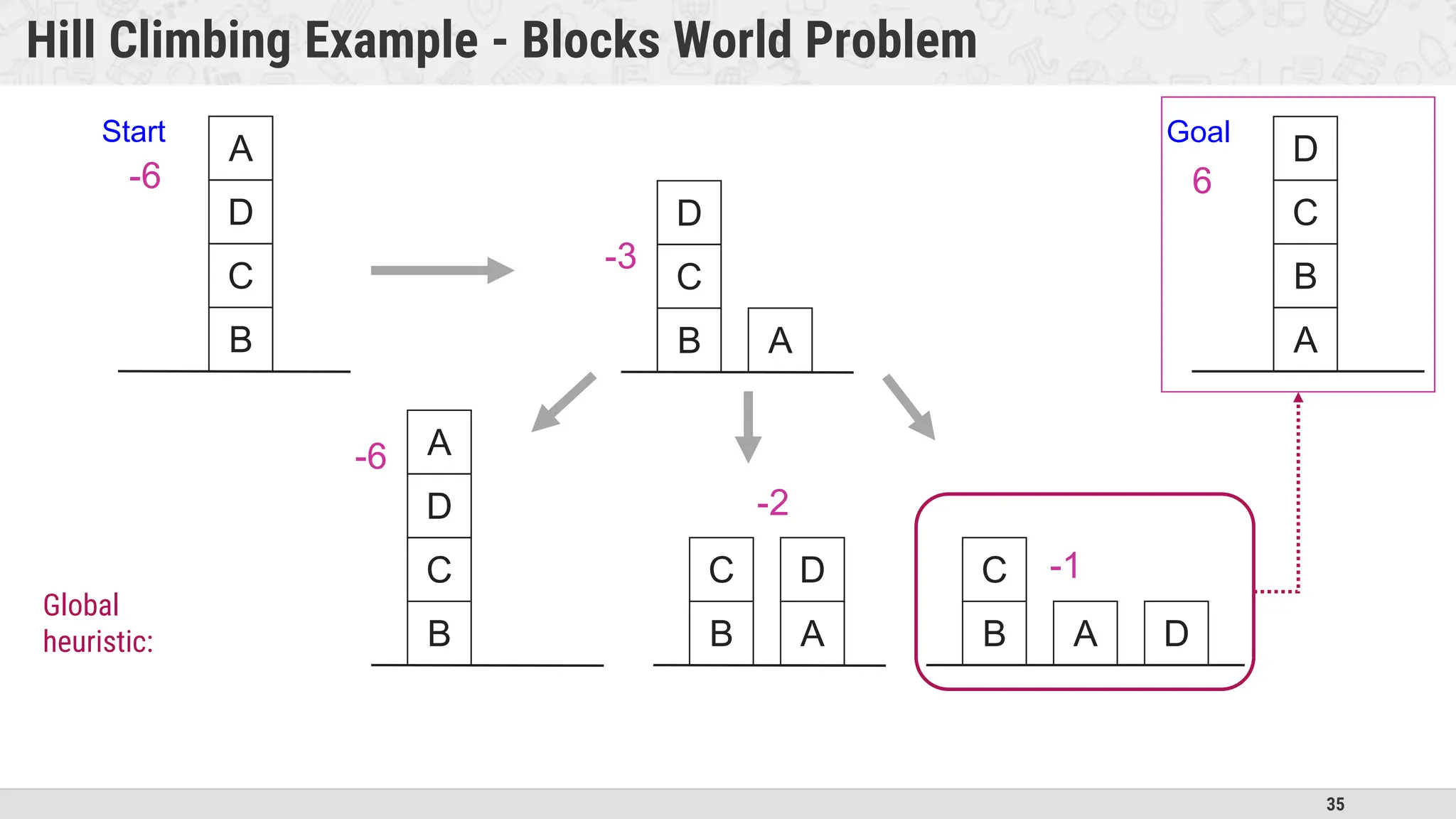
This document discusses state space search techniques and heuristic search algorithms. It begins by defining problems as state space searches and describing how to represent problems as state spaces. It then discusses uninformed search techniques like breadth-first search and depth-first search. Next, it covers heuristic search techniques and algorithms like hill climbing, best-first search, and A*. It provides examples to illustrate hill climbing and discusses issues that can arise like local maxima. Finally, it summarizes generate-and-test and steepest-ascent hill climbing algorithms. In summary, the document outlines different search strategies and algorithms that can be used to solve problems modeled as state space searches.