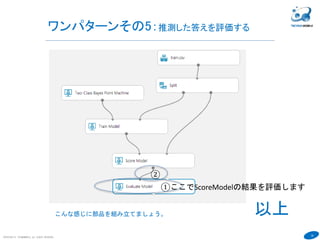
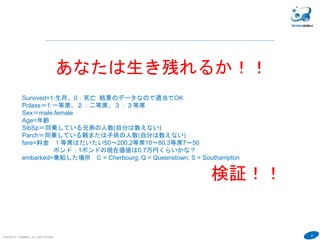
超初心者向けのビッグデータをつかった機械学習を実践的に学ぶ入門です。 ブラウザ操作ができればエンジニアではなく一般の人でも学ぶことが出来ます。 この学びの対象者は? →答えが知りたい人。ブラウザが使えればOK!統計の話は出てこないです。 教えないことは? →統計については質問しないでくださいorz 理系ですが専門じゃないです。 この資料は㈱テクノモバイルと共同開発しています。


![19
COPYRIGHT(C) TECHNOMOBILE ALL RIGHTS RESERVED.
講師
Gashfara,Inc.代表
デジタルハリウッド大学院客員講師
茂木健一
mogi@gashfara.com
kenichi.mogi@tcmobile.jp
http://facebook.com/mogiken
http://www.slideshare.net/mogiken1
自己紹介
[プロフィール/実績]
もぎ・けんいち●青山学院大学大学院卒。(株)東洋情報システム退社後、(株)
エイチアイ、グランスフィア(株)、(株)ファッションウォーカーなど数社の
ベンチャー企業の立ち上げ・創業期に参画し、ガシュファラ・インクをUSで起業。
システム開発ではゲーム、M&A企業評価システム、動画配信システム、電子マ
ネーシステム、ECフルフィルメントシステムなど、多彩な分野を経験。IT関連教
育ではBrew、Java、セキュリティーなどの講師として活躍。現在、(株)HUGG
を設立し、スマホのカップル向けSNSサービス[HUGG]をグローバルに展開。㈱テ
クノモバイルにて技術サポート。
【著書】
BREWプログラミング実践バイブル [共著] (インプレス)、PHP逆引き大全 516
の極意[共著](秀和システム)](https://image.slidesharecdn.com/random-150409171434-conversion-gate01/85/UP-19-320.jpg)

























![2e64ed78b0951c70ef8bd10cc818dbc6[1]](https://cdn.slidesharecdn.com/ss_thumbnails/2e64ed78b0951c70ef8bd10cc818dbc61-110415122358-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

























