More Related Content

PPTX
materi training IATF 16949.pptx 
PDF

PDF
BS EN 01337-2-2004 (2006).pdf 
PDF

PPTX
BUCKLING RESTRAINED BRACES 
PPTX
AITC Shear Wall Design Procedure (20151106) 
PPTX

PPTX
Featured

PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis... 
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing 
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process 
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR... 
PDF
ChatGPT and the Future of Work - Clark Boyd 
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf 
PDF
Everything You Need To Know About ChatGPT 
PDF
2024 State of Marketing Report – by Hubspot 
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024 
PDF
How to have difficult conversations 
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent 
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024 
PDF

PDF
Product Design Trends in 2024 | Teenage Engineerings 
PDF
Content Methodology: A Best Practices Report (Webinar) 
PDF
Getting into the tech field. what next 
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health 
PDF
5 Public speaking tips from TED - Visualized summary 
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights 
PPTX
How to Prepare For a Successful Job Search for 2024 動作解析装置の臨床応用 潤和会発表用
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
動作解析システム構成
• カメラ
ビデオカメラ1台…二次元動作解析用
デジタルカメラ4台…三次元動作解析用
• 床反力計(フォースプレート)
AMTI社製、最大130kg程度まで耐用
• 解析装置(解析ソフト)
ToMoCo FP…重心動揺~二次元動作解析
ToMoCo Lite…二次元動作解析
ToMoCo VM…三次元動作解析
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
重心位置
10
kg20kg
200N
100
N
合成した力をわかりやすく
一本で表しているが、実際
は小さい無数のベクトルが
働いている。
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 38.
- 42.
- 43.
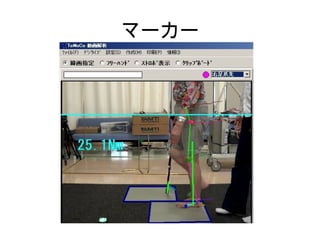
ToMoCo計測方法
• 機器をスタンバイさせる。
• 被験者の身体へマーカーを貼付し、床反力計上で動作を行う
姿をビデオで撮影する。
• 撮影のコマ数は、1秒間を60コマに区切って撮影する。
(研究上は100コマ以上が推奨される)
• マーカーの貼付部位は、見たいもの・目的によって変更する。
(現在の設定では、DIFF10モデルを採用中)
• 撮影後、ソフト上でマーカーをもとにリンクモデルを作成し
、そのモデルを用いて角度やモーメント等を算出する。
- 44.
ToMoCoの注意点
• 2次元では平面処理なので、実際の関節位置との
誤差がある。
• 空間での重心位置の可視化は2次元では無理。
• マーカーモデルは正確な関節中心を表してはいな
いので、モーメントに誤差がある。
• 静止立位でのニュートラル設定がないため、関節
角度には誤差がある。
• モーメントは総和なので同時収縮は計測できない
し、筋収縮は筋電図を用いて証明しなければなら
ない。(遊脚期中の膝伸展モーメントなど。)
• 数値を用いて研究したい場合など、出てくる莫大
なエクセルデータは自力で処理。
- 45.
分析可能な例
• 治療前後の歩容の変化
• 立ち上がり方の違いによる関節の動きの
違い
• バランスを崩した際の四肢体幹の反応
• 平地と坂道の歩行の変化
• 座位バランスのとり方の分析
• 他の測定機器と組み合わせれば多くの動
作分析が可能
- 46.
Editor's Notes
- #3 はじめに一言挨拶をさせて頂きますが、私がなぜ今回のように解析装置についての勉強会を開くのかという事についてですが、その理由は過去に私が鹿児島大学の方で動物実験や解析装置を用いた研究法について学んできたからという経験があるからと思っています。免許を取って臨床に出て様々な勉強会に参加していくうちに、姿勢や動作についての表現方法や分析方法について、同じ事を言ってるのに分析方法が違ったり表現方法が異なったりする現実にぶち当たります。そして本当の真実は何なのだろうと疑問を持ち解析装置をいじくる事になったわけです。写真は鹿児島に勉強会でI先輩とお会いした際に撮った貴重な一枚です。
ただ、それは実習中から芽生えた好奇心でもあり、実習中のバイザーでもあり尊敬するI先輩から力学的な視点を持って分析してアプローチをするというご指導を頂いた経験がきっかけのひとつでもあります。そして、潤和会へ来て宮崎姿勢動作研究会と工藤さんと出会い、数年という長い月日を経て工藤さんが解析装置導入にあたって尽力する姿を横で見させてもらったご縁もあり、こうやって勉強会を開かせてもらうに至りました。本当に色々と思いの深い機会だからこそ、リハ部の皆で使っていけるよう尽力させてもらいたいと思います。
- #4 叡智の結晶です。
- #10 カメラ1台では平面認知で二次元だが、カメラを2台以上にしていくことで空間上の位置を把握し、台数を増やすほど死角がなく位置を把握・撮影できる。
空間的な位置がわかることで速度(位置を時間で微分)がわかり、速度がわかれば加速度(速度を時間で微分)がわかる。
- #11 体の部位に色のついたマーカーを貼り、撮影された動画の中からその色のマーカーを識別してソフトの方で記録します。なので、本来は単色のカーテンをするなどなるべく周囲に様々な色がない環境での計測が望ましいです。
そしてこのマーキングした部位を線で結んだモデルを元に、角度やモーメントなどを算出します。
ToMoCoの場合はマーカーがなくとも行えるのですが、相当の手間がかかるのでお勧めはしません。
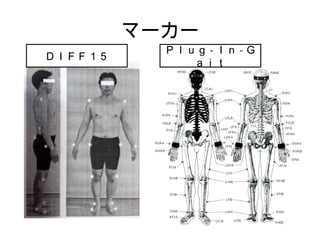
- #12 臨床歩行分析研究会が推奨しているDIFF15モデルは、このToMoCoに入力されているモデルです。全身に15か所のマーキングをするだけで簡単に取れるモデルですが、欠点としては回旋角度が取れない事や、矢状面での分析がメインとされたモデルですので、前額面の角度やモーメントなどのデーターの正確性に欠ける点です。
プラグインゲートは合計30か所くらいマーキングしないといけないので大変だが、回旋など関節のすべての方向のデータが取れる。
これらのモデルはすべてマーキングするわけではなく、自分が何が見たいかによって変える事が可能です。また、自分が何を見たいのかによって、そのモデルを論文で探してソフトにモデルを入れ込み、分析する事が可能です。
- #13 さきほどの指定された部位につけたマーカーを、後でパソコン上で処理を行い、マーカーの点を結んだ線でできたモデルを元に、データの分析と算出を行います。
一度撮影した動画を解析ソフトを開いて処理を行い、そしてやっと動画の解析が行えるというわけです。なので、ここまでの処理はたくさん触ってなるべく早く行えるようになっておくと便利です。
- #14 誤差というものはマーキングする部位がずれる事でも当たり前に実際のデータとの計測したデータでの誤差が生じます。
そして誤差で言うならもうひとつ注意しなければならないのが、二次元での分析の場合では、マーキングがいくら正確に行えたとしても、被写体の形が変わってしまうという事です。
二次元の問題としては、図のように一枚のはがきがあるとして、はがきの四隅の角度を計測すると実際は90度なのですが、撮影する方向が真横でなく斜めになったりすると、写真のように形が変わって見えてしまい、角度や数値に誤差が出てくる事です。二次元という平面で分析する場合、このような誤差があるということを理解した上で扱えば良いのかなと思います。
- #16 さて、ここで簡単な力学の基本的な事項を確認したいと思います。
- #17 重心というものは、力の合成で算出された合成された力の中心位置見たいなもの。これを合成重心と呼ぶ。
力の合成というのは力を合わせること(合力)ですが、たとえば図のように異なる方向の力が働いた時、高校数学のベクトルの加法、すなわち力の延長戦から発生した力で平行四辺形を作ったその対角線上で合成された力が表されます。(分解の際は、生体の場合では長方形の対角線をもとに分解する。)
- #18 今このテコ状の棒には今、2つのおもりの重さ(両方とも下向き)30kg(約3N)があり、棒には平行で同じ下向きの力である30kgが加わっている(棒の重さは考えない)。この時、棒のどこに合成された30kgの力が加わっているか、すなわち作用線がどこにあるかというと、赤矢印の場所である。
赤矢印の場所は左右のおもりの「力」の中点部になるので、1:2の中間点である上記の左方向から発生する。
重心というのは、体の分節に働く力をすべて合成した力が通る点である。
- #19 質量・重さなどの体の分節のそれぞれに加わっている力を合わせて1つの力にして表現したものが重心です。
つまりは体の各文節の位置関係や力関係が変われば、重心の位置も動くということです。
- #20 図のように姿勢をかえて体の分節の位置が変わると、当然あわさった重心の位置自体も変化する。
後ろに反れば後ろに移動するし、前屈すれば前方にも下方にもいくし、腕を万歳すれば上にもいく。
3次元動作解析装置では映像に映った体の分節を、体の各分節の重さの平均値をもとに、空間的な重心の位置関係を算出する(しているはず)。
ただし、2次元では空間的な重心位置を映像上で算出して確認する事は困難と思われる。その場合、床反力計の重心動揺計機能で足元から見た平面上での重心の移動はみれる。
- #21 静止した物である場合、重心から矢印の方向に力が落ちる。その力が落ちる場所を床反力作用点という。安定を保つという意味で捉えるとすればこの2つの関係性が大切になる。物体が静止している静止している。
- #22 安定という視点では、重心位置が支持基底面と呼ばれる物の中で平行を保てなければならないといえる。そこで、重心と足圧中心の視点が出てくる。
現在でも地球上のほとんどの事はニュートン力学で計算されているが、そのニュートンの第1法則で言うなら、通常静止している物体はCOGとCOPが一致しており外力がない限りは物体、つまりは重心は動かない。重心を動かすためには、外力を加える必要があります。
体を押されれば動きますし、外から動かない場合は自力でCOPを操作して動かすことになります。
- #23 これをニュートンの第三法則にならうと、身体重心位置(COG)から重力として圧中心部(COP)部に向かった下方向に力が加わる時、逆にいうと床から、COP部から同じ分だけの力が反力として帰ってきている事になります。この線が床反力線です。COGとCOP、この2点の関係で力の方向は決まり、この2点の位置関係によって力は決定されると言っても良いのかもしれません。
- #24 重心動揺計というのは、この重心の落ちる点、すなわちCOPを見ているわけです。
- #25 重心動揺計は足圧中心計および体重計みたいなもので、COPしか見ておらず、純粋な垂直方向・;Z軸成分の力しか見れない。よって、静止姿勢であれば重心COGと一致するのですが、動的な場面では重心位置を必ずしも反映しない。
床反力計は板の四隅にある球面の水晶の歪みにより、斜め方向の力も算出できるので、動的な場面での重心位置まで反映できる。
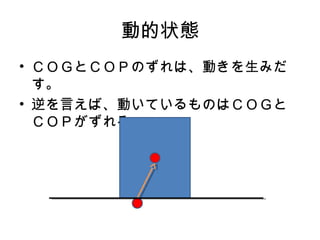
- #29 モーメントというのも、ちょっと簡単に捉えてみると、COGとCOPのずれから生まれる回転力のようなものです。
ToMoCoのシステムでは、床反力計によって算出されたこの棒の部分のようなベクトルを映像で可視化させてくれる一面もあります。
これを関節に置き換えて、関節に加わる回転する力を可視化し数値化できるのも解析装置の魅力です。
この床反力は目で見る事はできませんし、可視化することで体に加わる力を目で見て、実際の数字で表す事が可能です。
- #30 では、体においてはどうでしょう。
スクワットの様子で考えれば、COPとCOGの位置関係が赤丸のようにあり、床反力線が赤線のように出てたとします。
単純にこの女性が脱力をしたときに、この姿勢からどのように体が崩れていくか。
下肢は曲がり、体幹も曲がり、腕は落ち、首も曲がり。下方および後方へ崩れるように尻もちをつく様子が想像できると思います。
その脱力したときに体に加わっている力が外的モーメント、その外的な力に耐えるように体が発揮している力が内的モーメントと言います。
- #31 関節モーメントとは、例えばこの下肢で分解した図。下腿部の質量重心、大腿部の質量重心にわけて考えると、地面のCOPとの位置関係を見てもらうとどちらに回転して倒れる力が加わるのかが予想できますよね。先ほど言ったように、COPとCOGの位置関係で回転する動く力が発生します。この力を可視化そして数値化したものが解析装置です。
- #32 最後に簡単にモーメントを想像するとすれば、床反力を逆にしてみればわかりやすいかもしれません。
床反力は反作用力の事で、すなわち床に加わる力を反対の力として表しているだけです。同じベクトルの向きで力が加われば、同じ向きのまま矢印の方向だけ変えてるだけのものです。
モーメントというのは正式には回転する力の事で、関節などの支点からベクトルまでの距離(モーメントアーム)の積で求められる回転力の値です。
たとえば膝関節であれば、膝より後ろを赤矢印が下に落ちる力が働くので、関節には曲げる方向に回転する力が加わってるんだなと理解すれば良いわけです。
- #33 三次元動作解析になると、関節浸透力というものが測れるようになります(なるはずです)。
体節間浸透力というのは関節に加わる三方向の力です。ただし、それについては算出できるようになるはずですが、関節応力という実際に関節に加わる圧縮力や牽引力のようなものは測れません。
それは、関節応力というものは関節を様々な方向から跨ぐ数種類の筋や靭帯による圧縮・牽引力まで用いて算出しなければならないものだからです。
ここは難しい話になると思いますので、興味がある人だけ本を開いてみればよいかと思います。