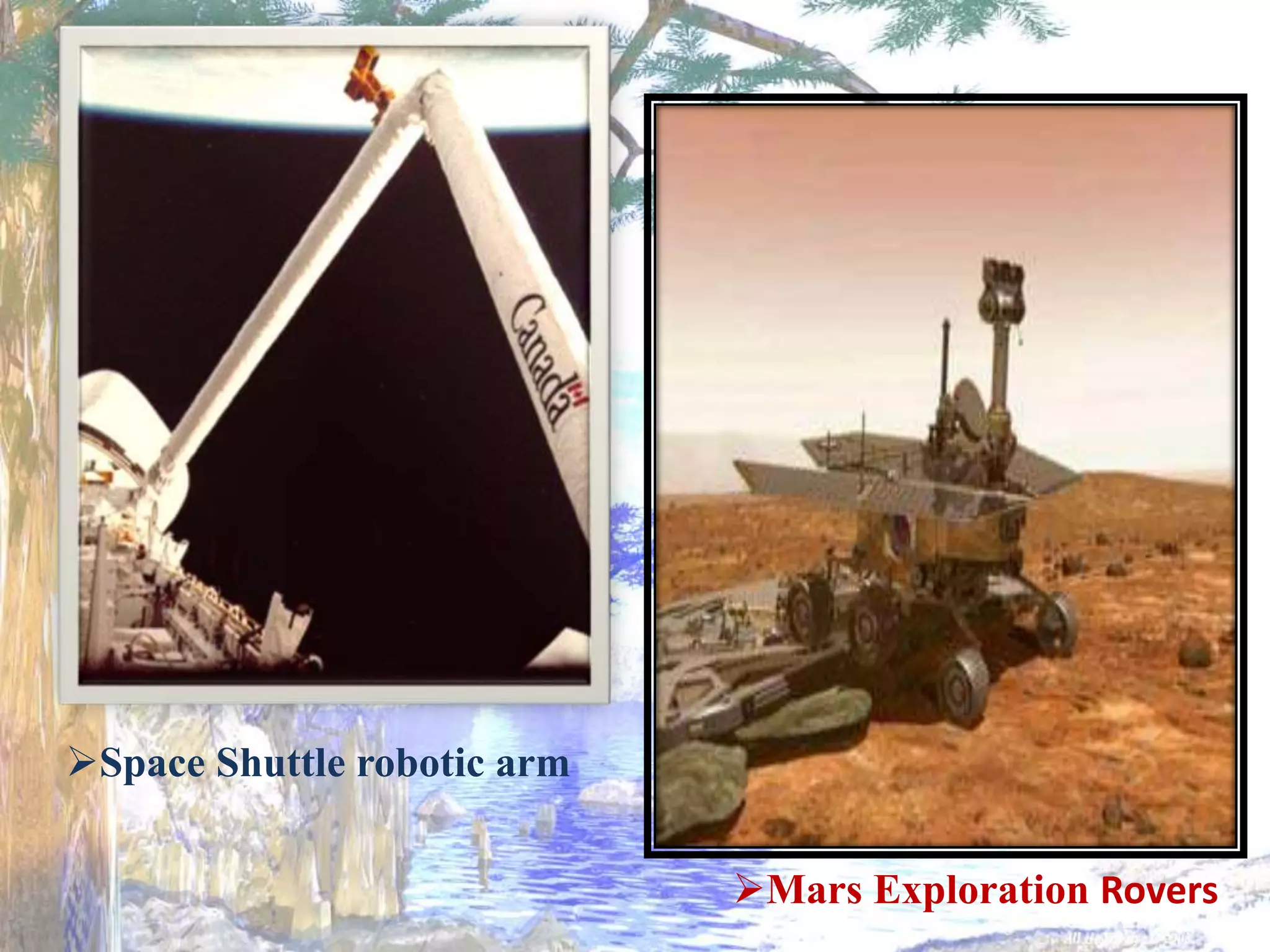
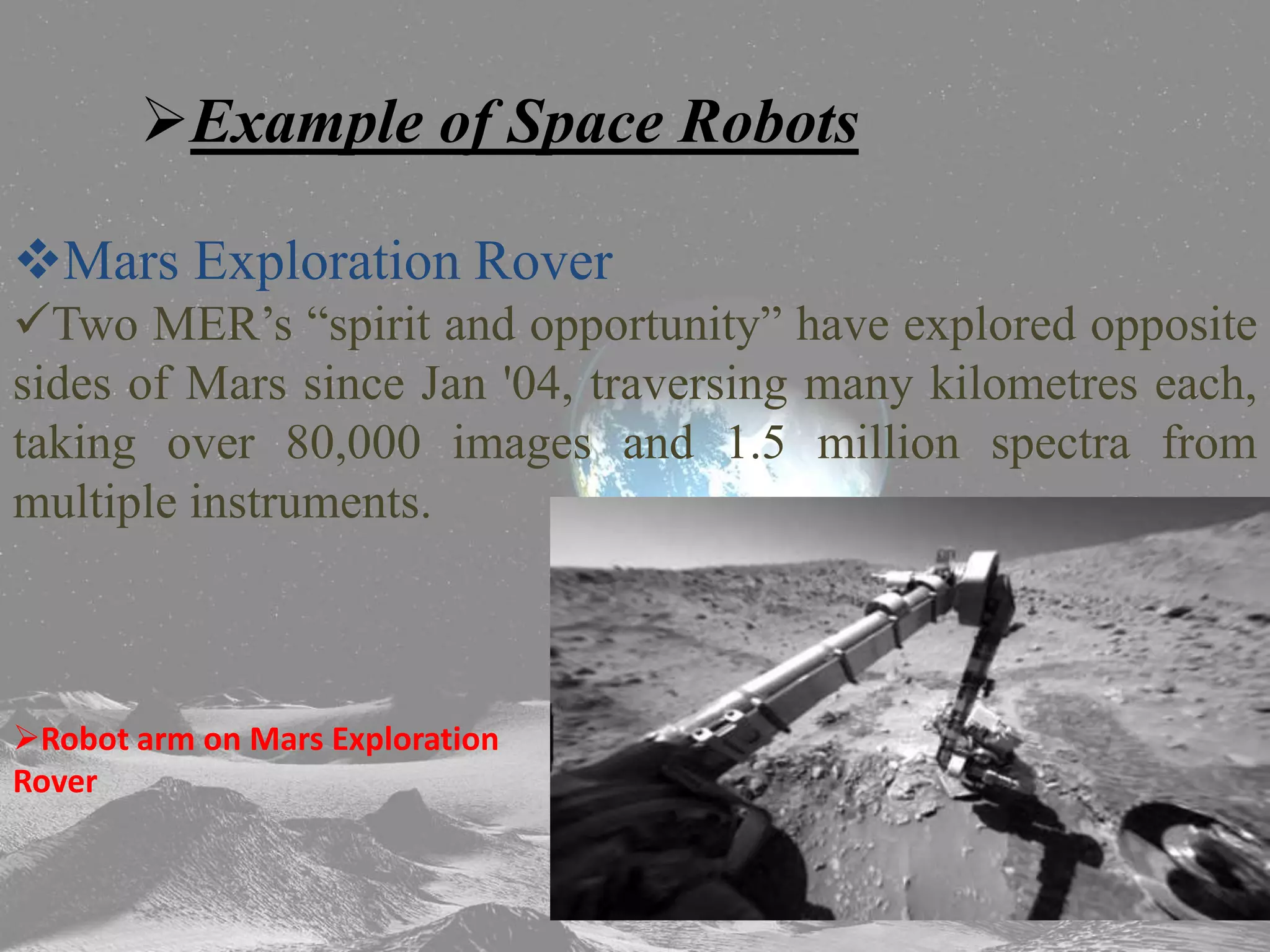
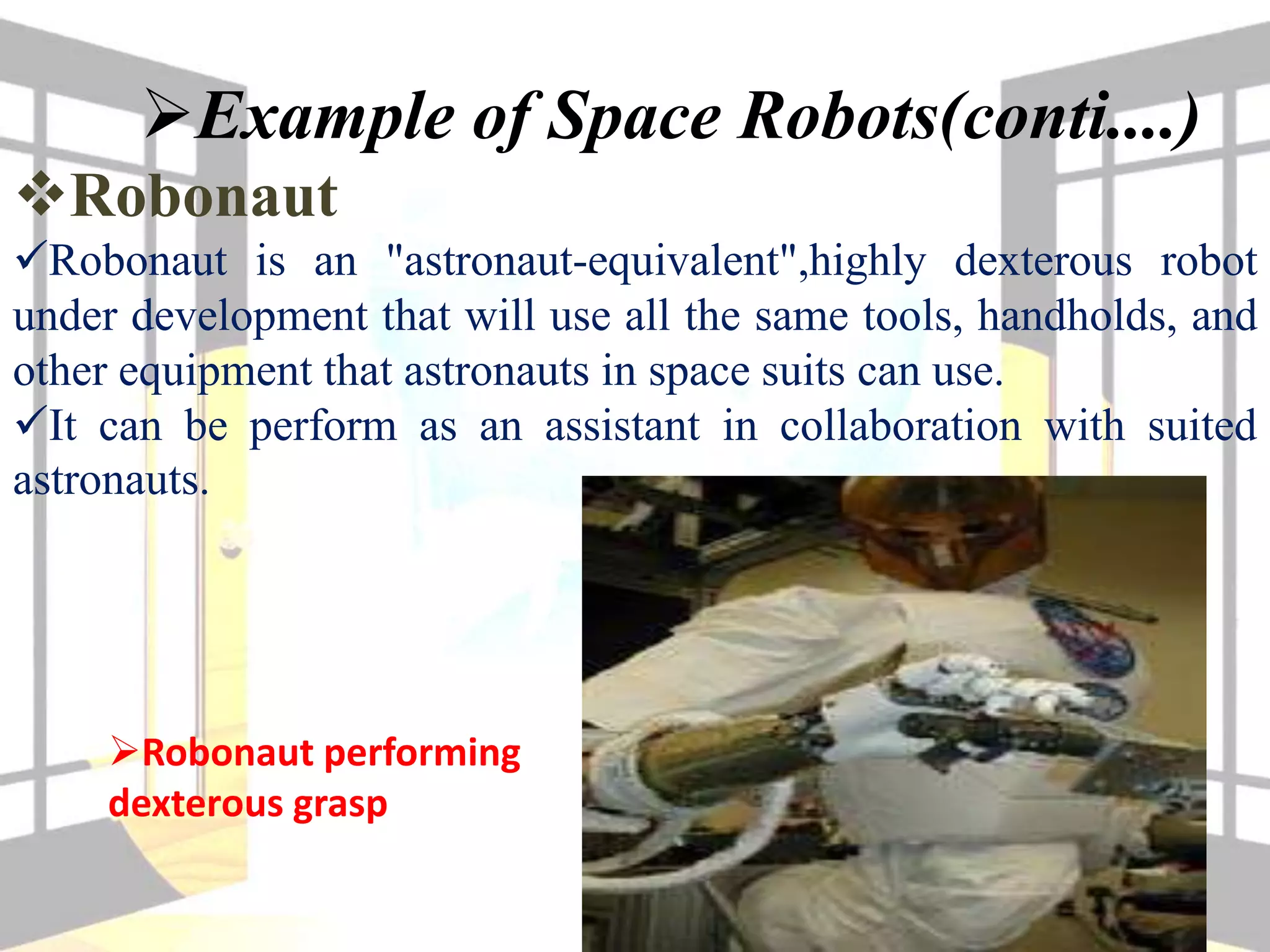
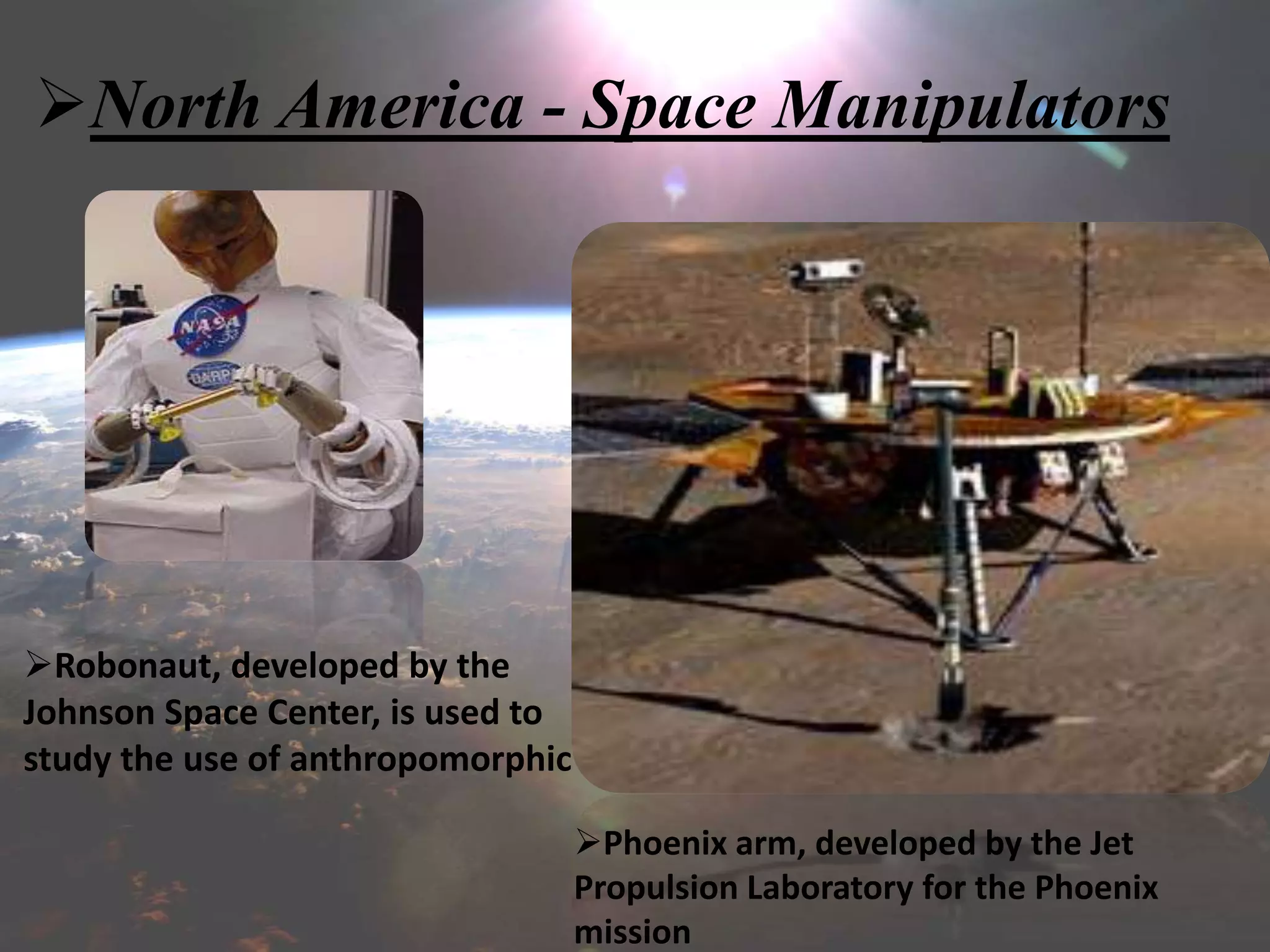
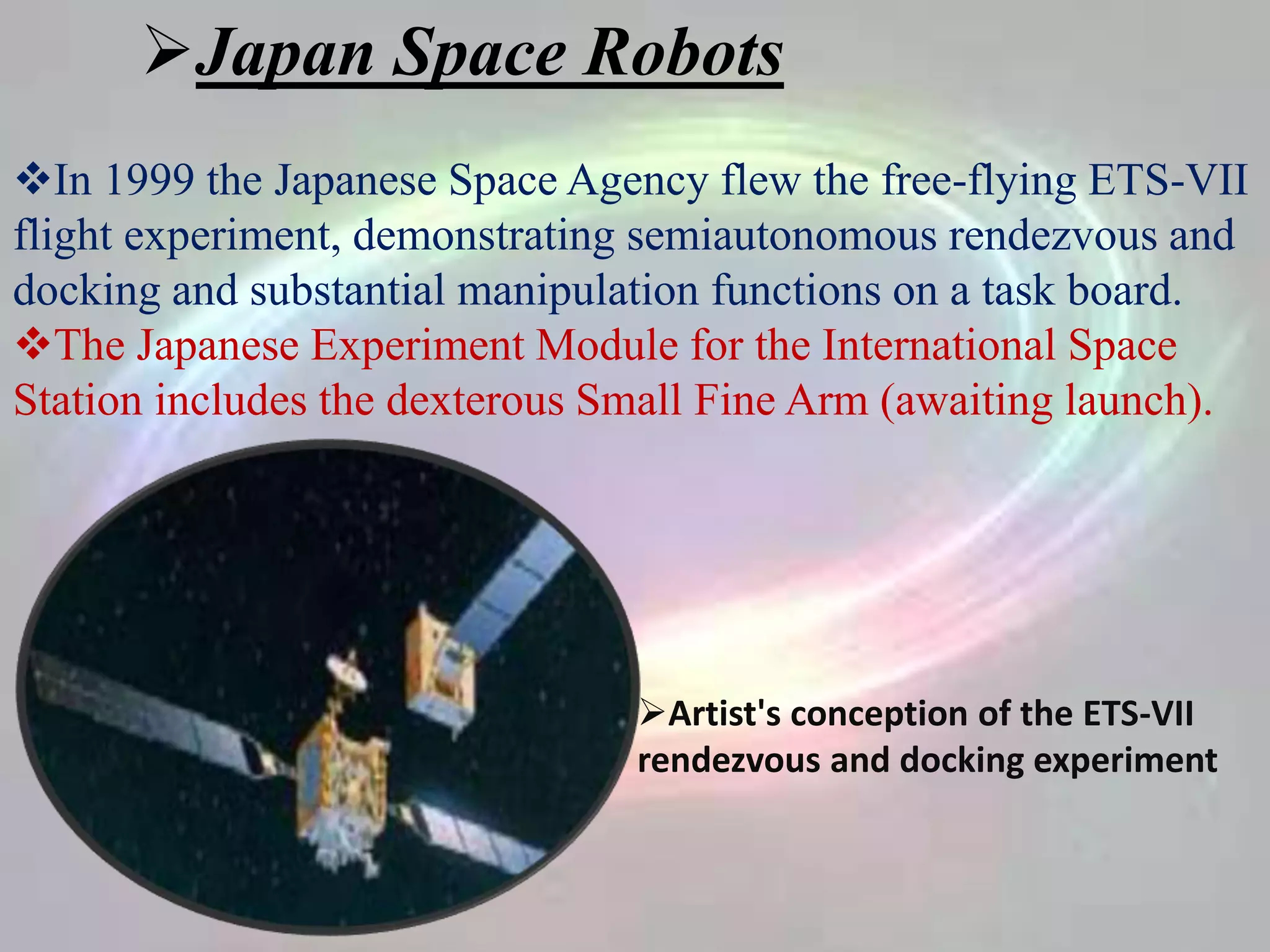
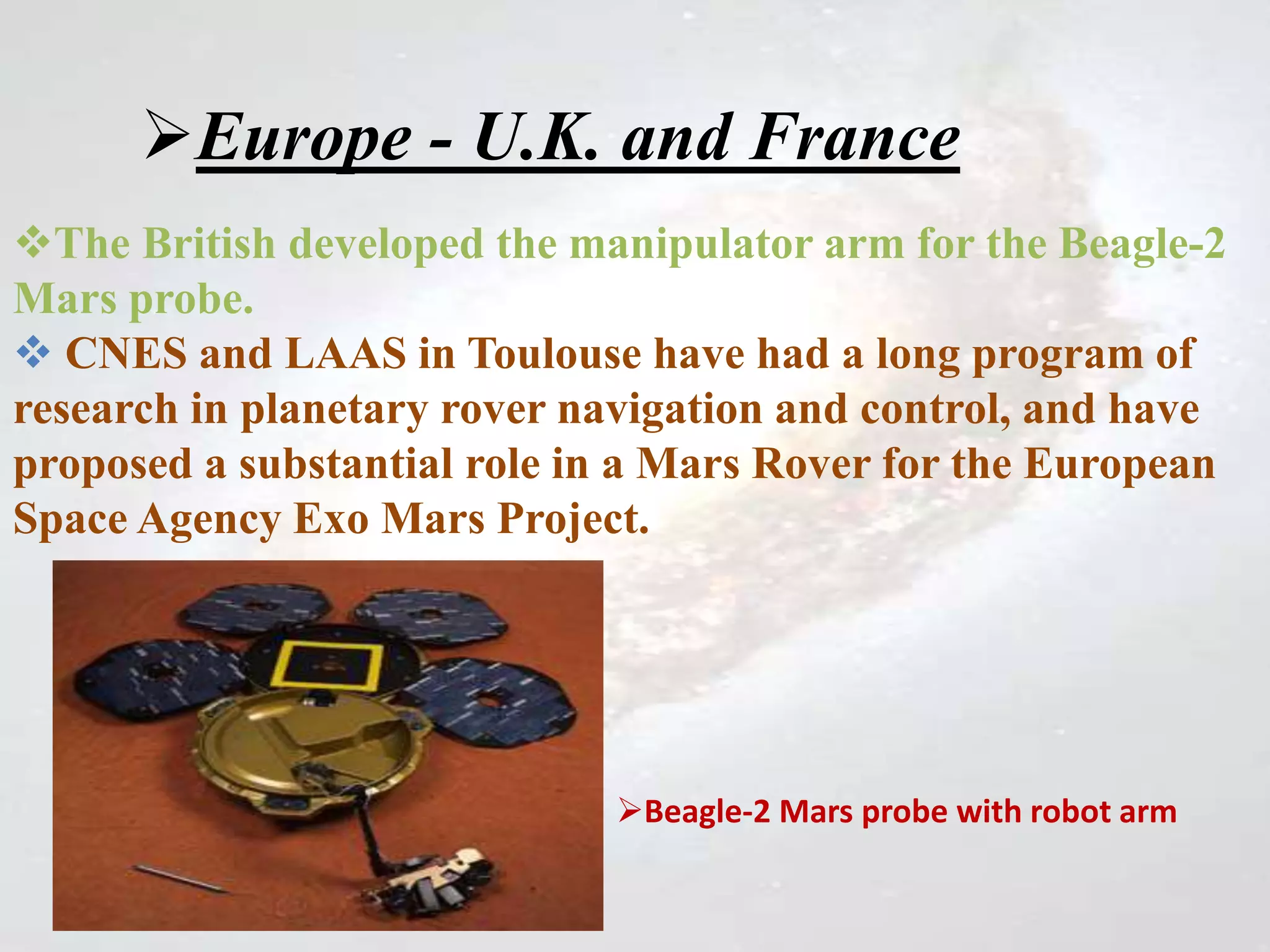
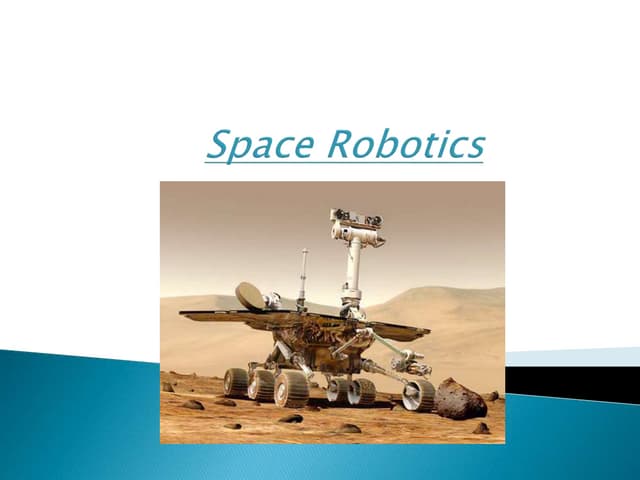
This document discusses space robotics and provides examples of current and potential future applications. It covers the importance of space robots in performing tasks less expensively and with less risk than human astronauts. Examples are given of current space robots, including Mars rovers and Robonaut, and the technological capabilities needed include mobility, manipulation, and operating in extreme environments with communication delays. Fundamental research challenges are outlined in areas like navigation and force control. International efforts in space robotics from countries and agencies like NASA, Japan, Europe, and the UK are also summarized. The future scope of space robotics is expected to include more autonomous planetary rovers and robots able to precisely assemble and service hardware despite time delays.