Downloaded 20 times




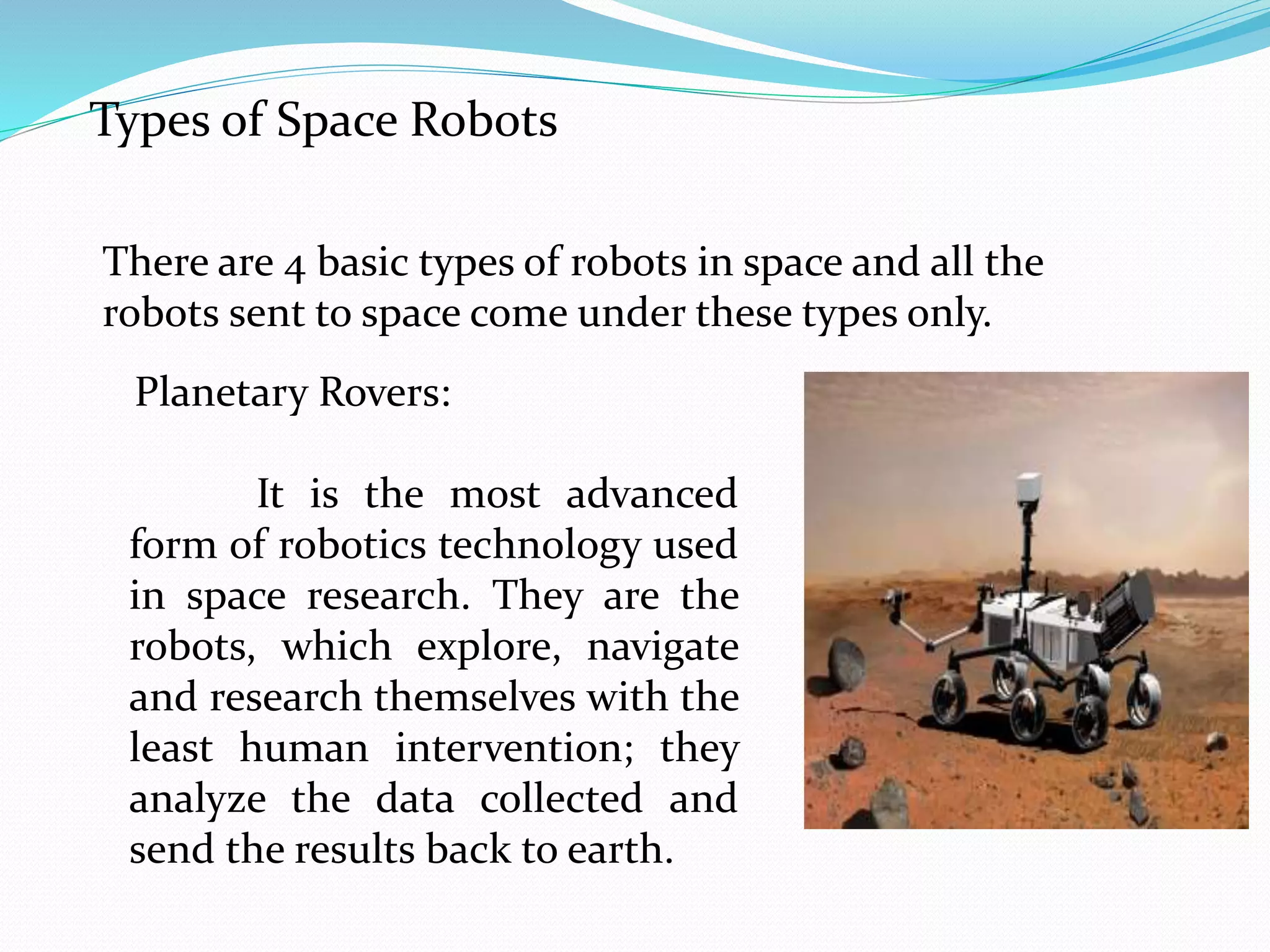

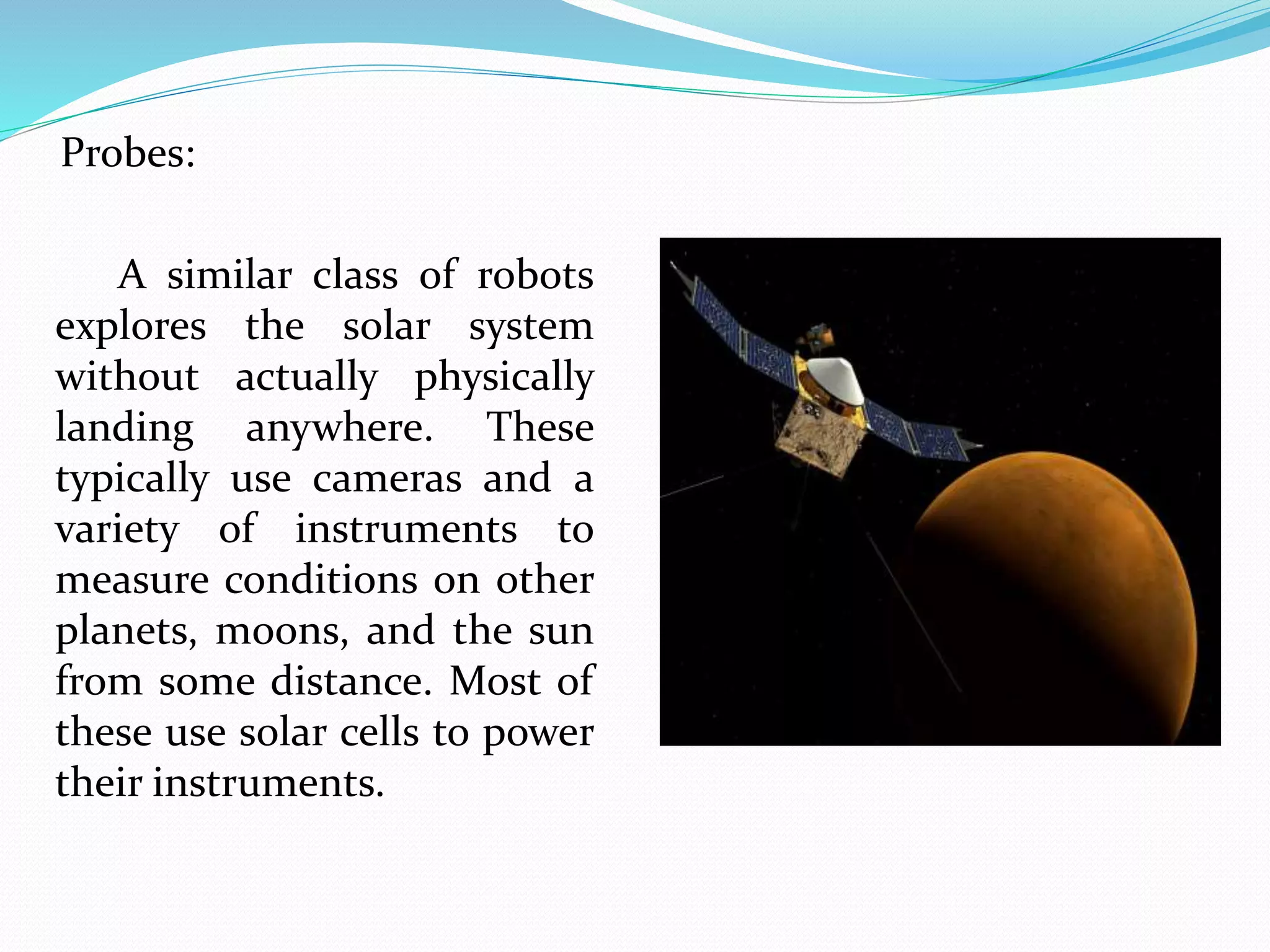













Space robotics is the development of robots capable of functioning in space environments to perform tasks like exploration, construction, and maintenance. There are four main types of space robots: planetary rovers, in-orbit operators, probes, and robots that assist astronauts. Designing space robots presents challenges like operating in zero gravity and vacuum conditions. Key areas of application include in-orbit assembly, maintenance, and resupply. Future directions include developing more autonomous robots and improving teleoperation technologies.