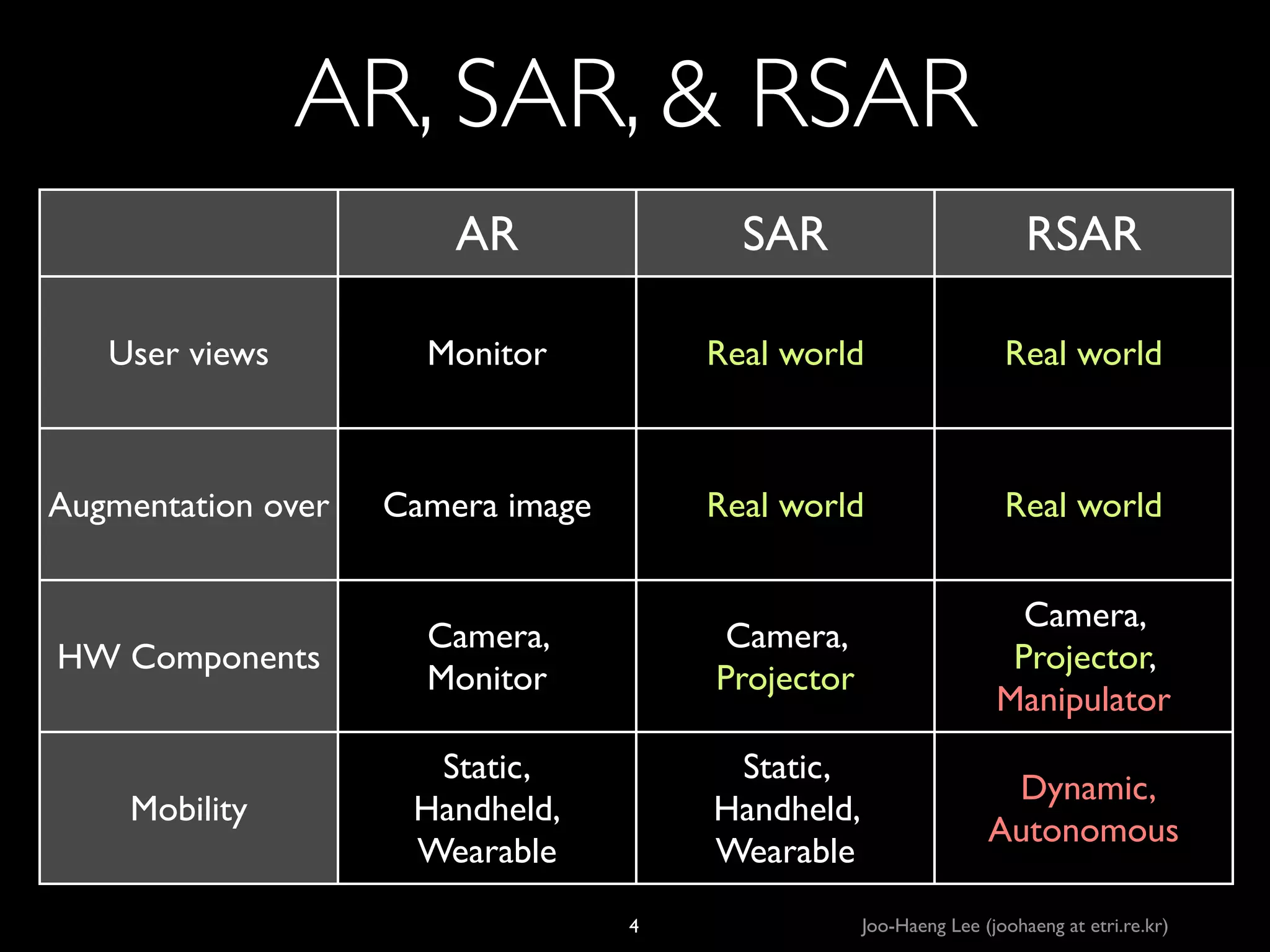
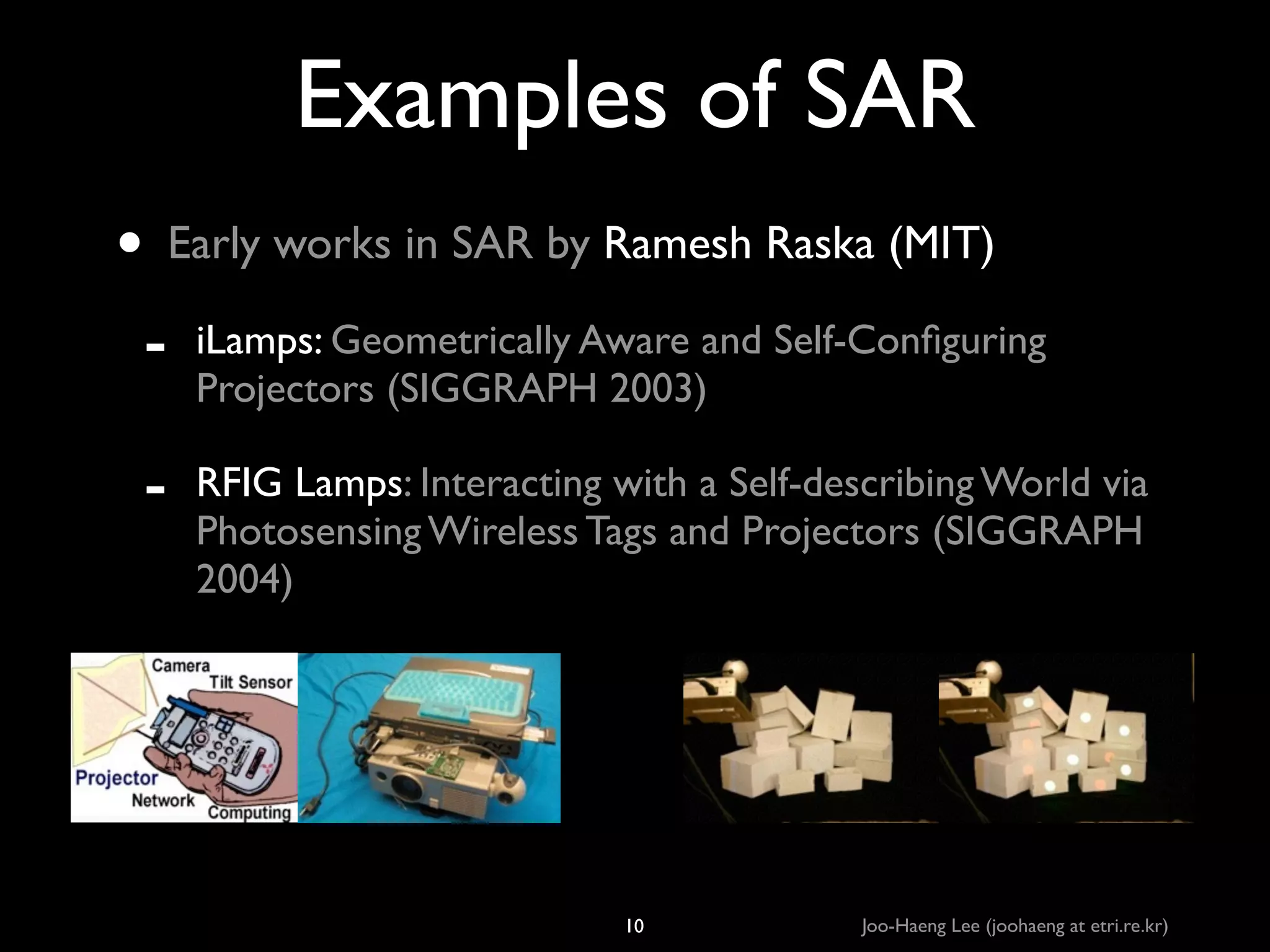
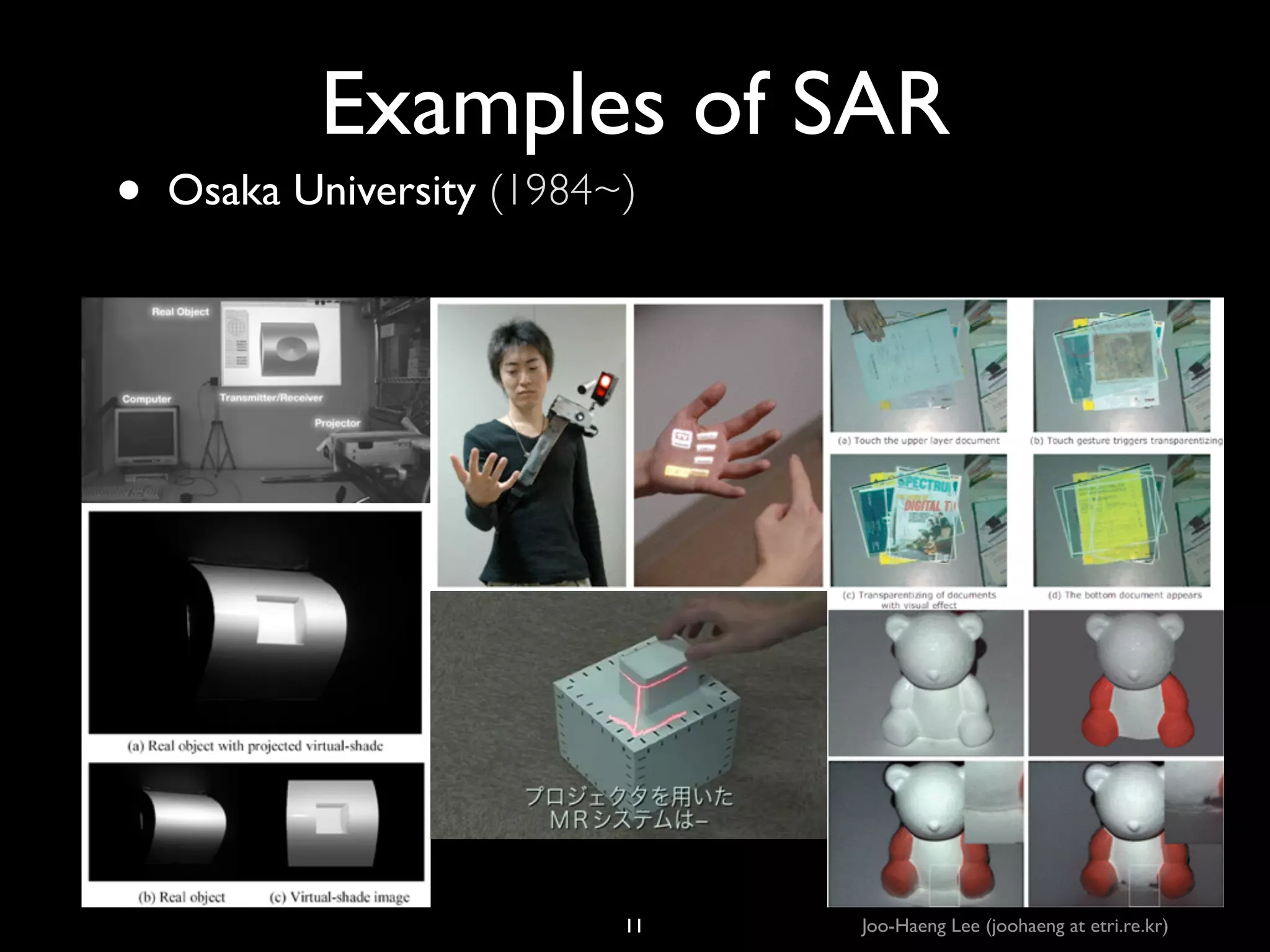
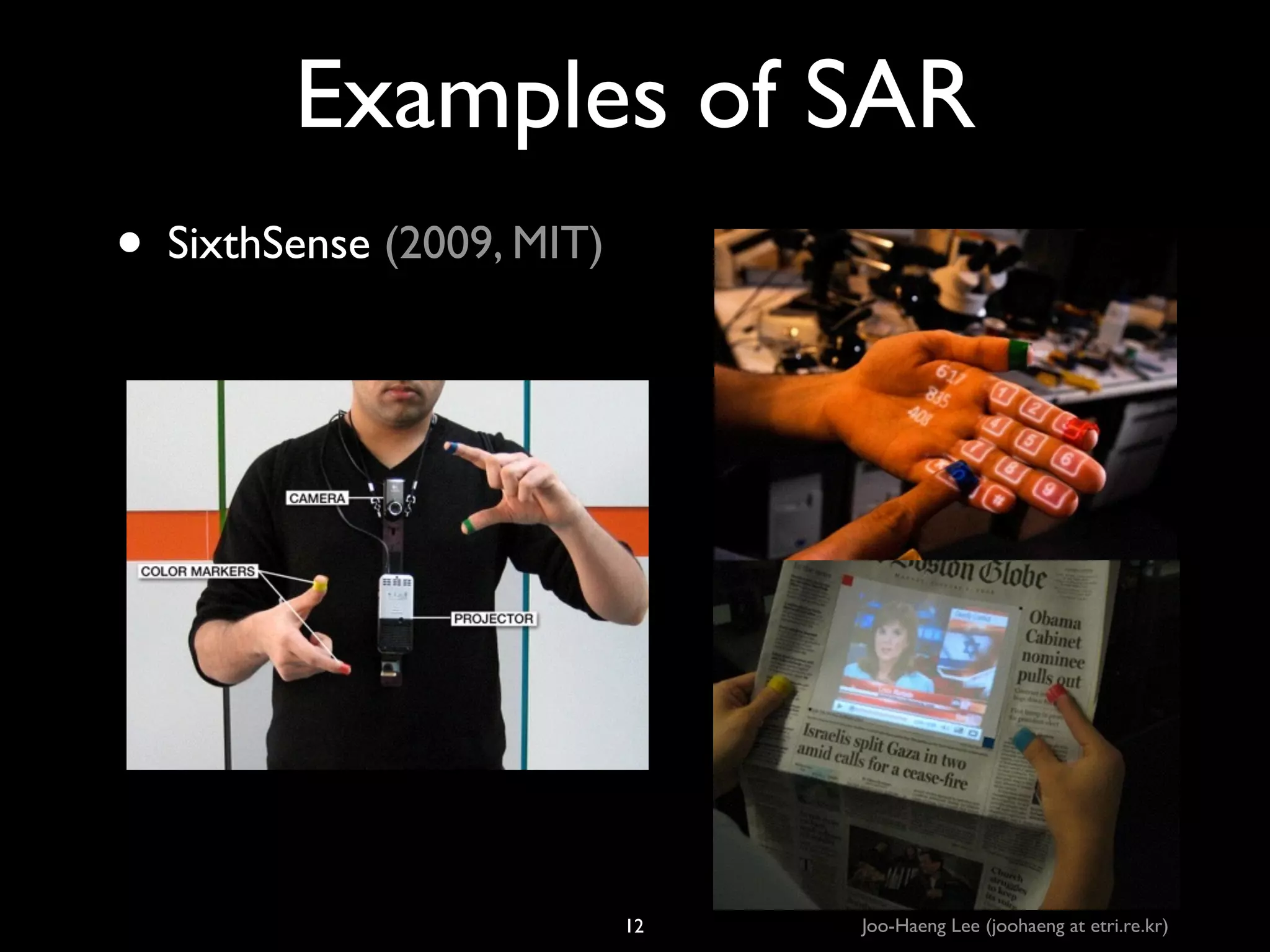
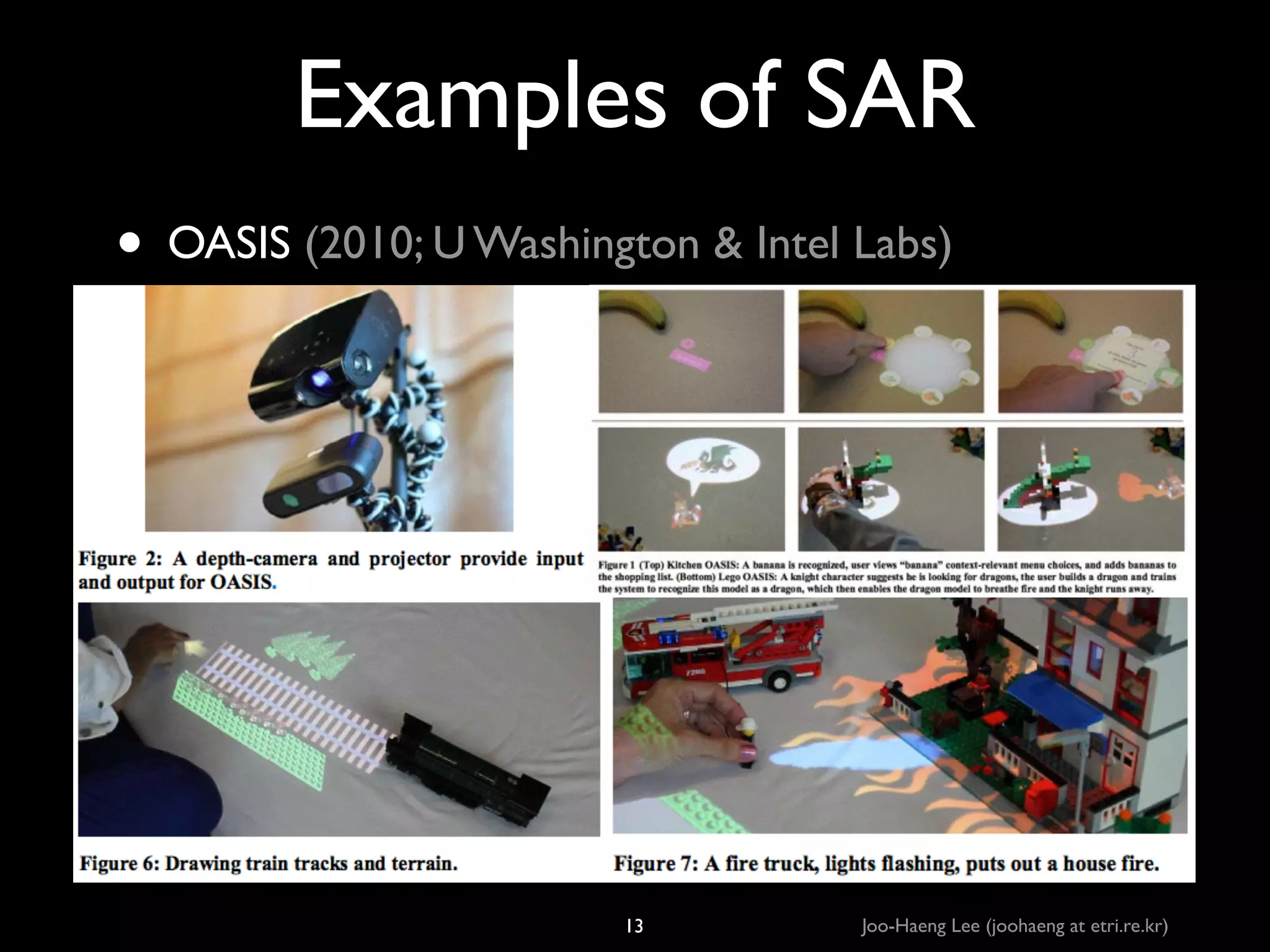
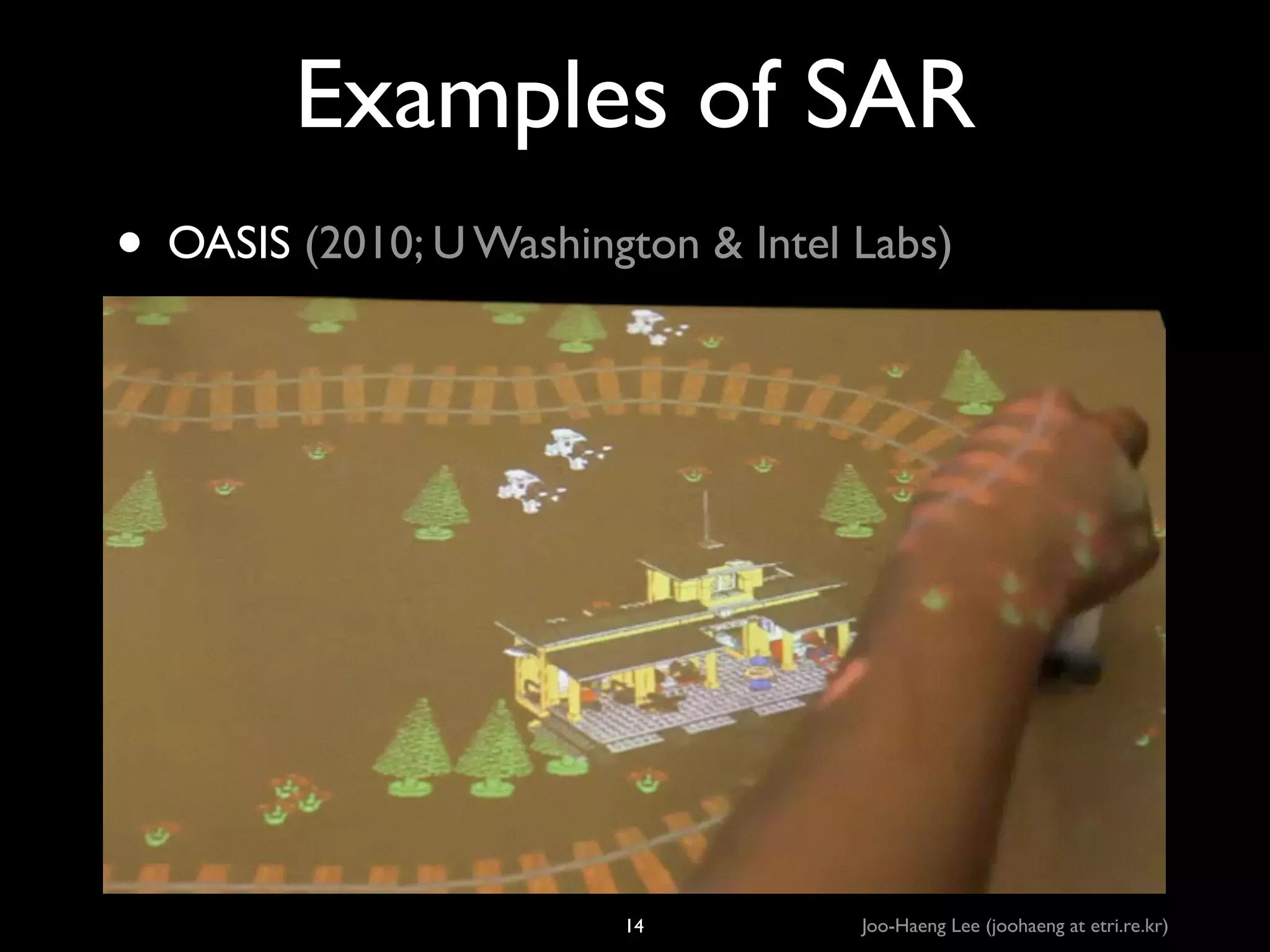
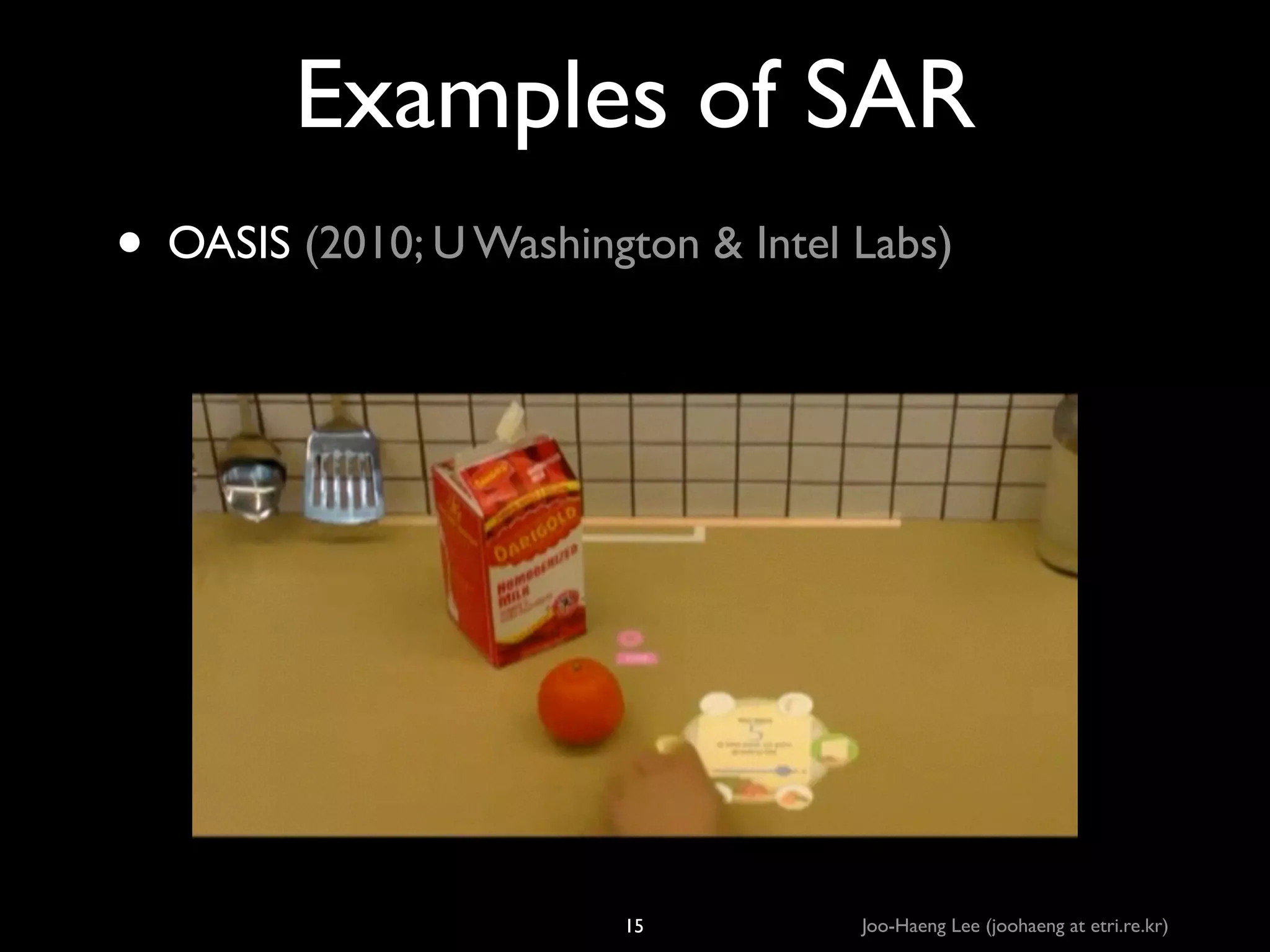
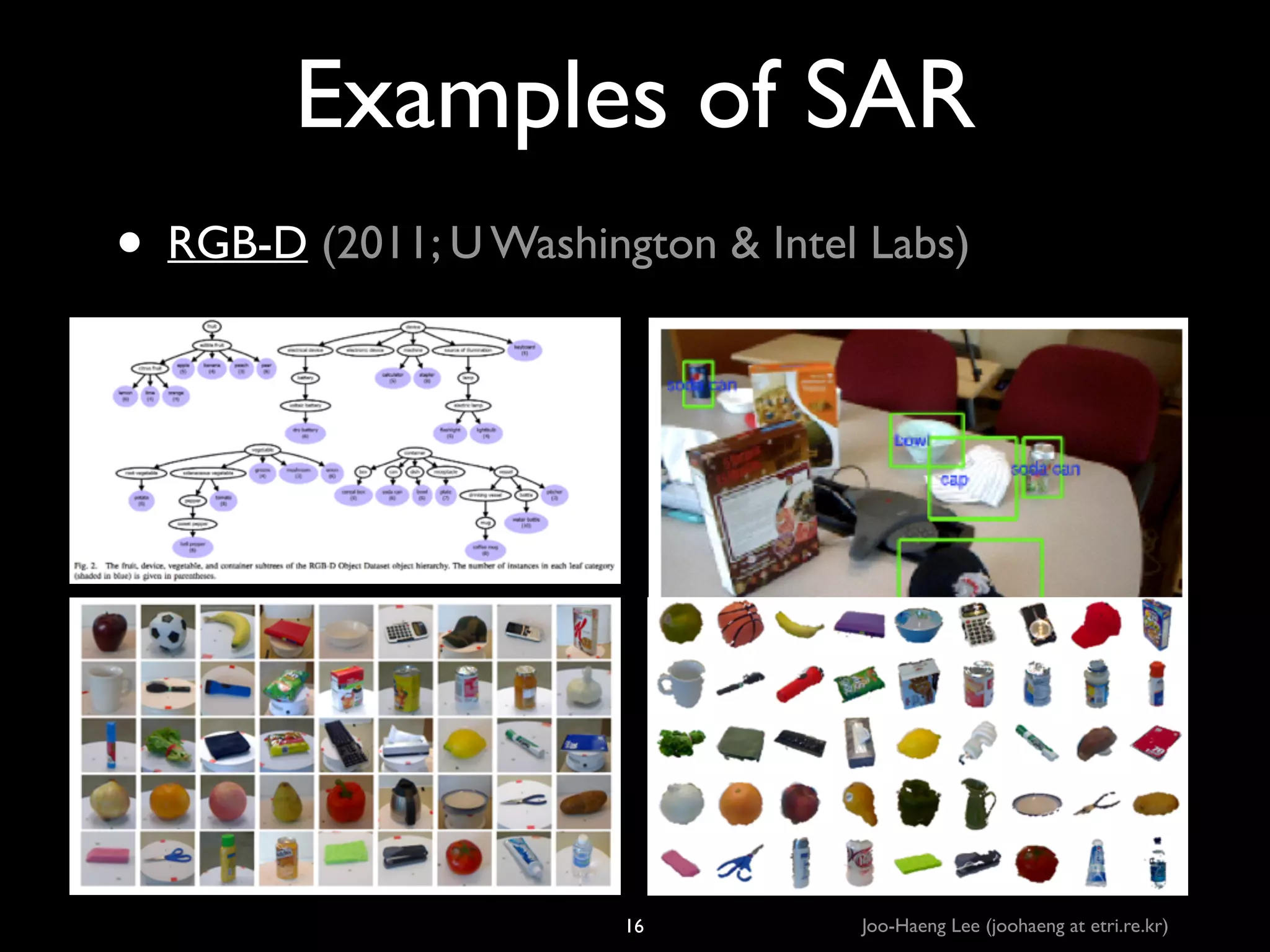
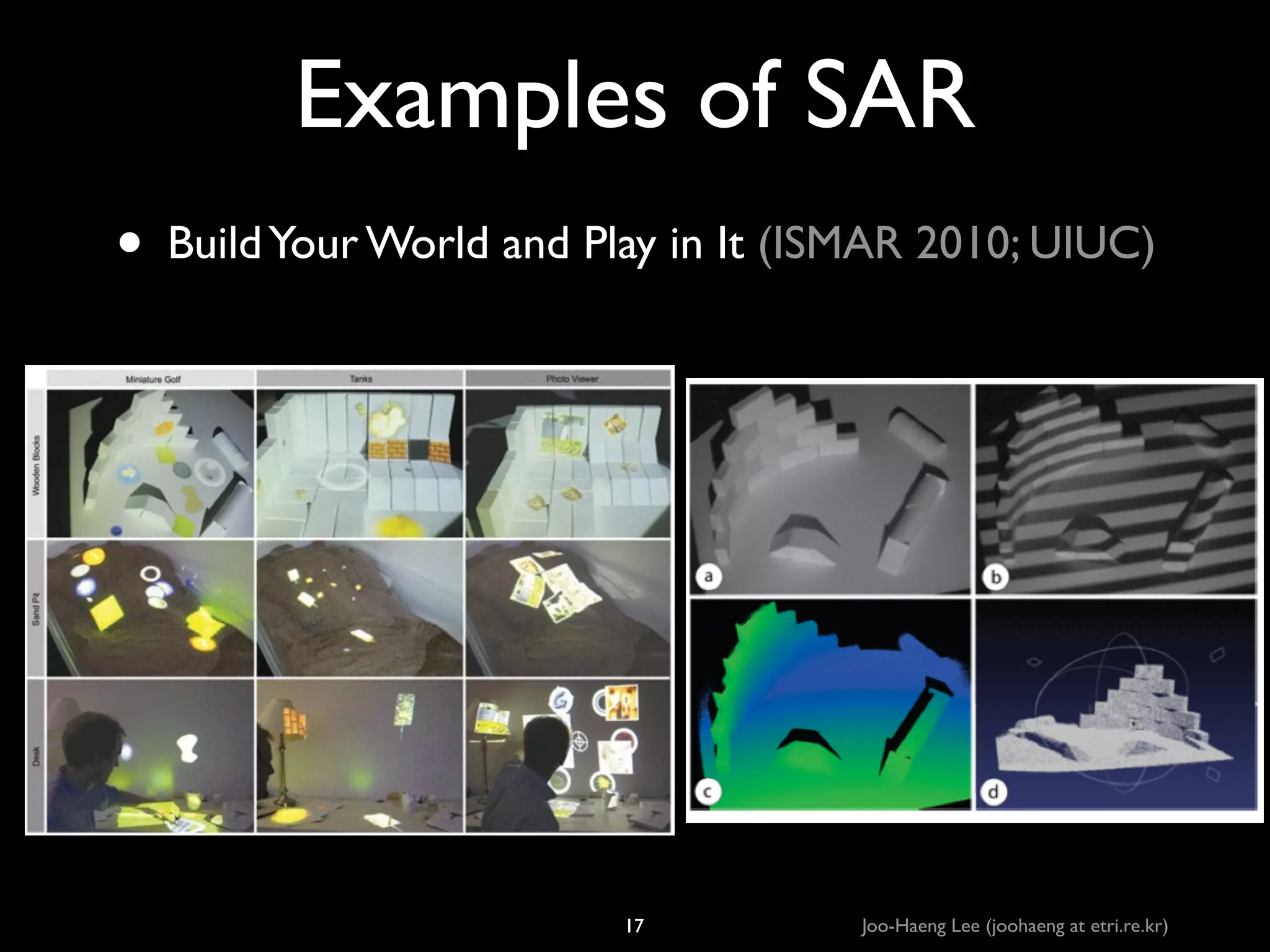
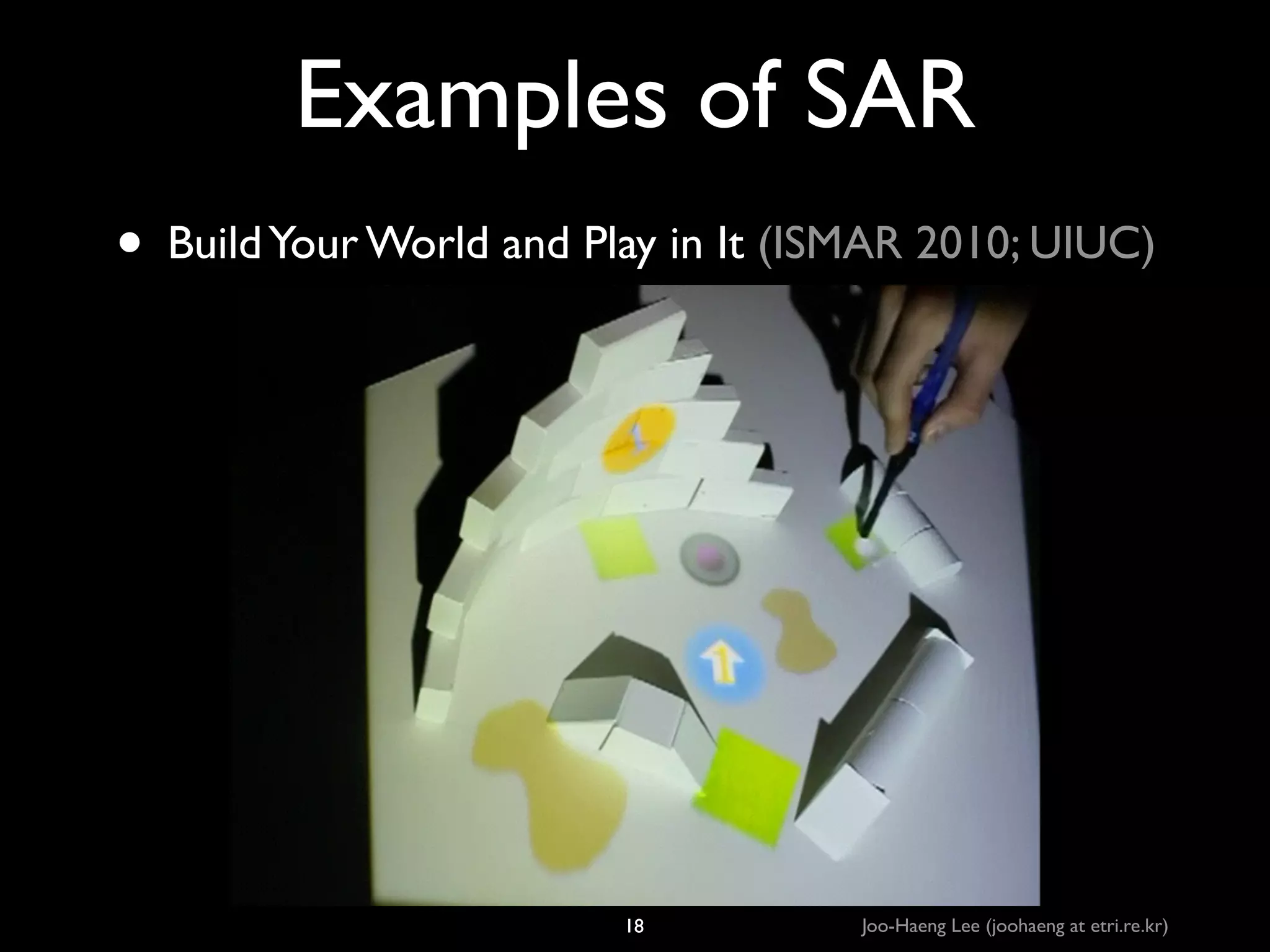
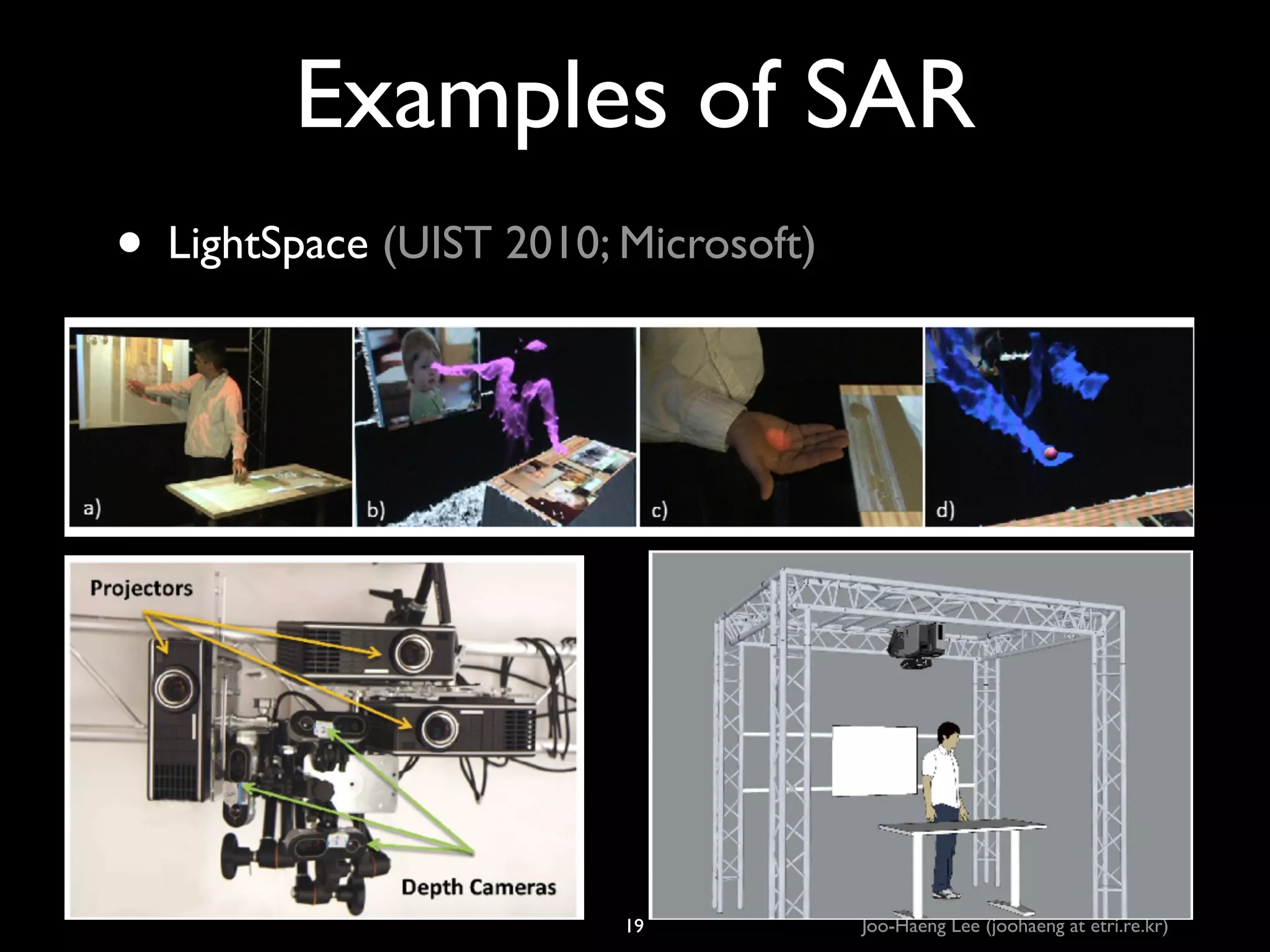
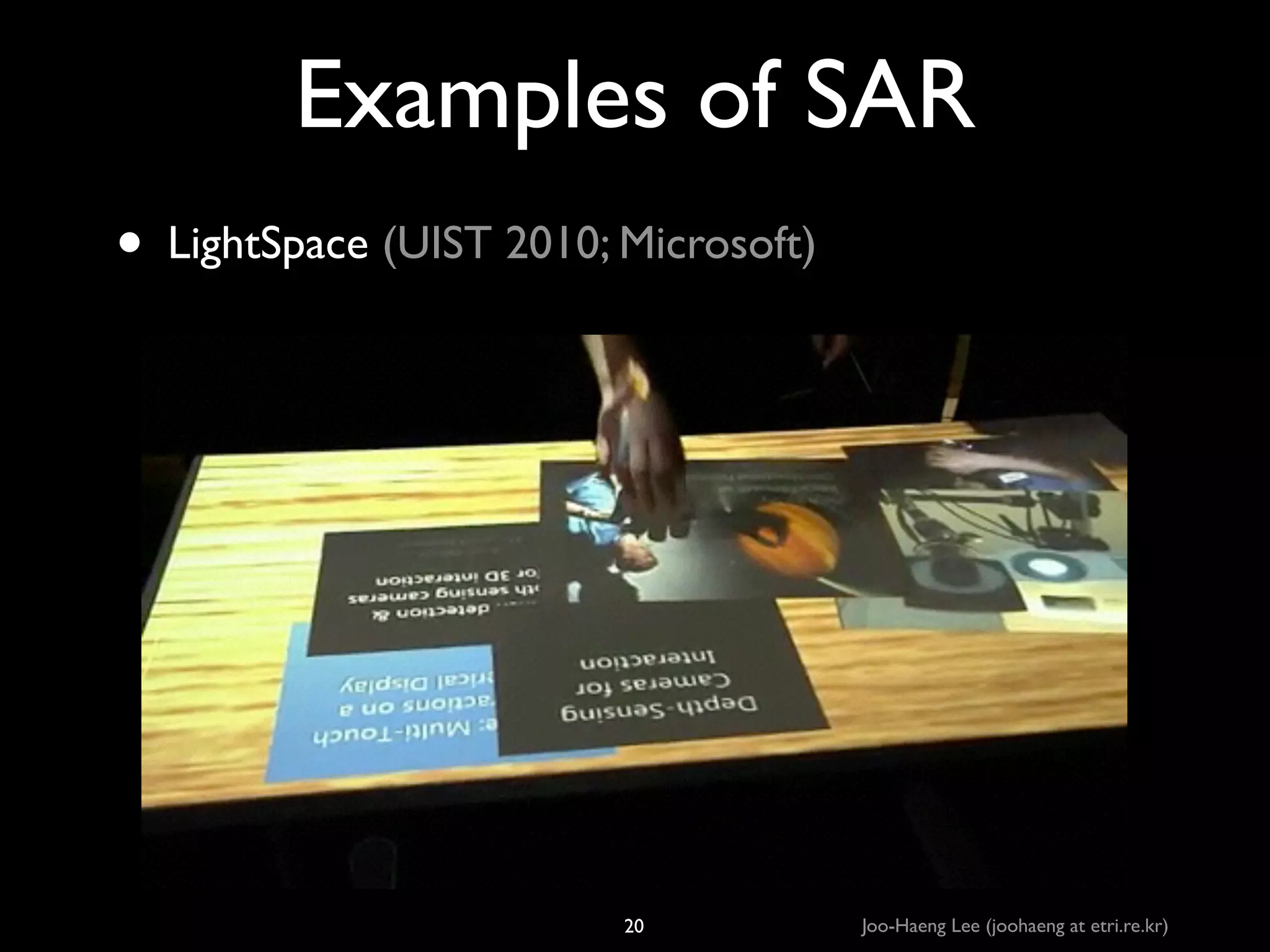
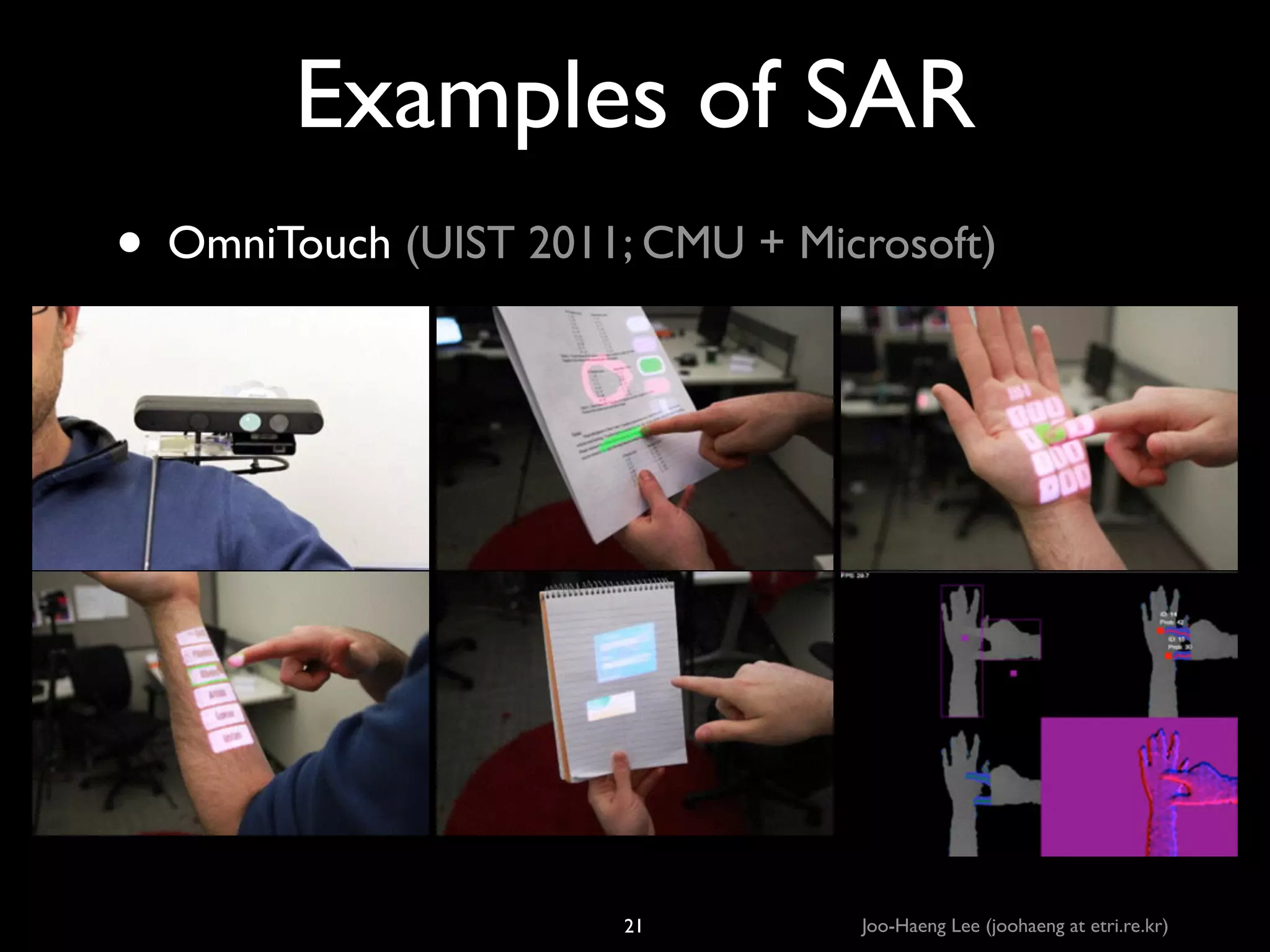
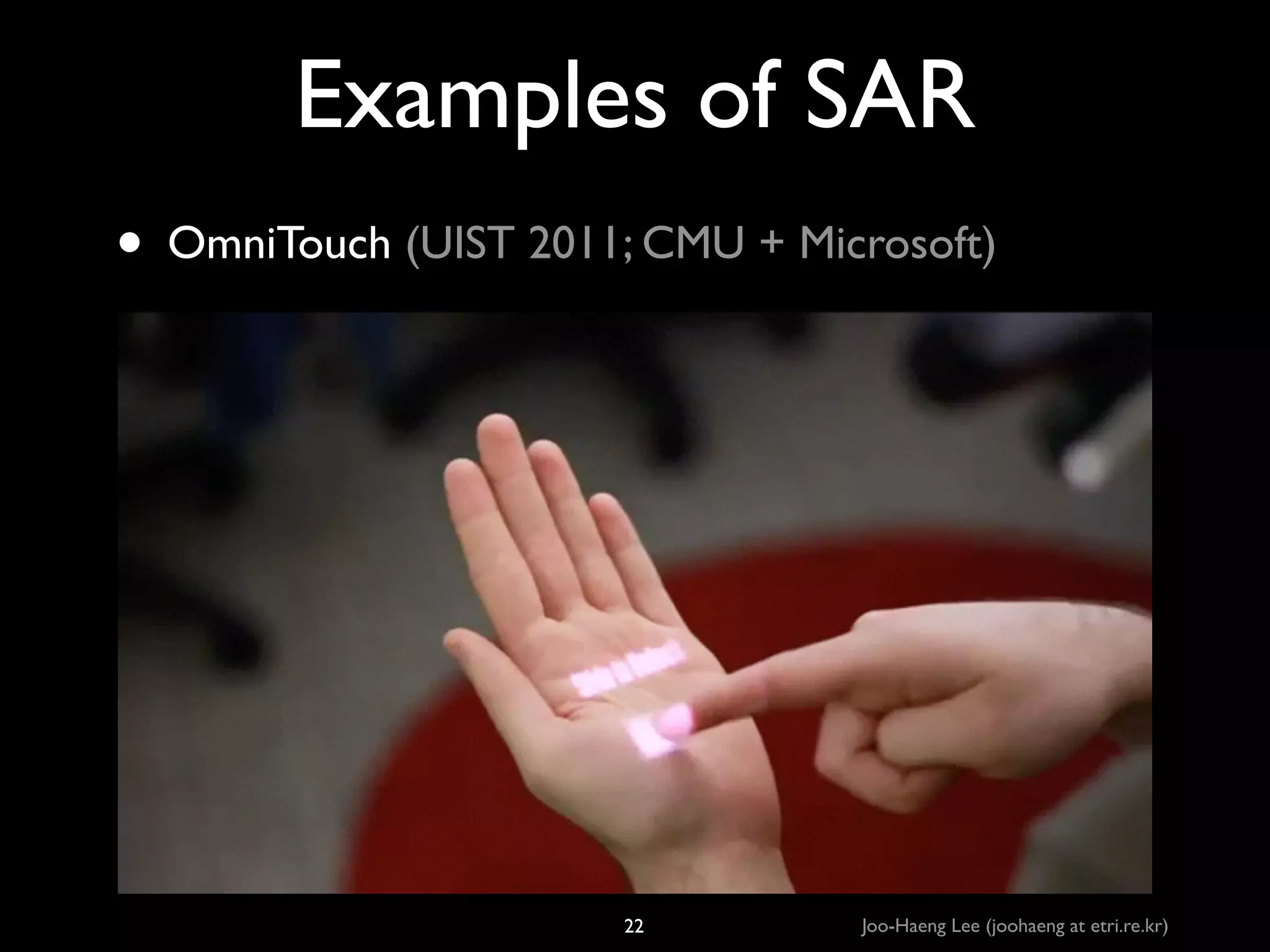
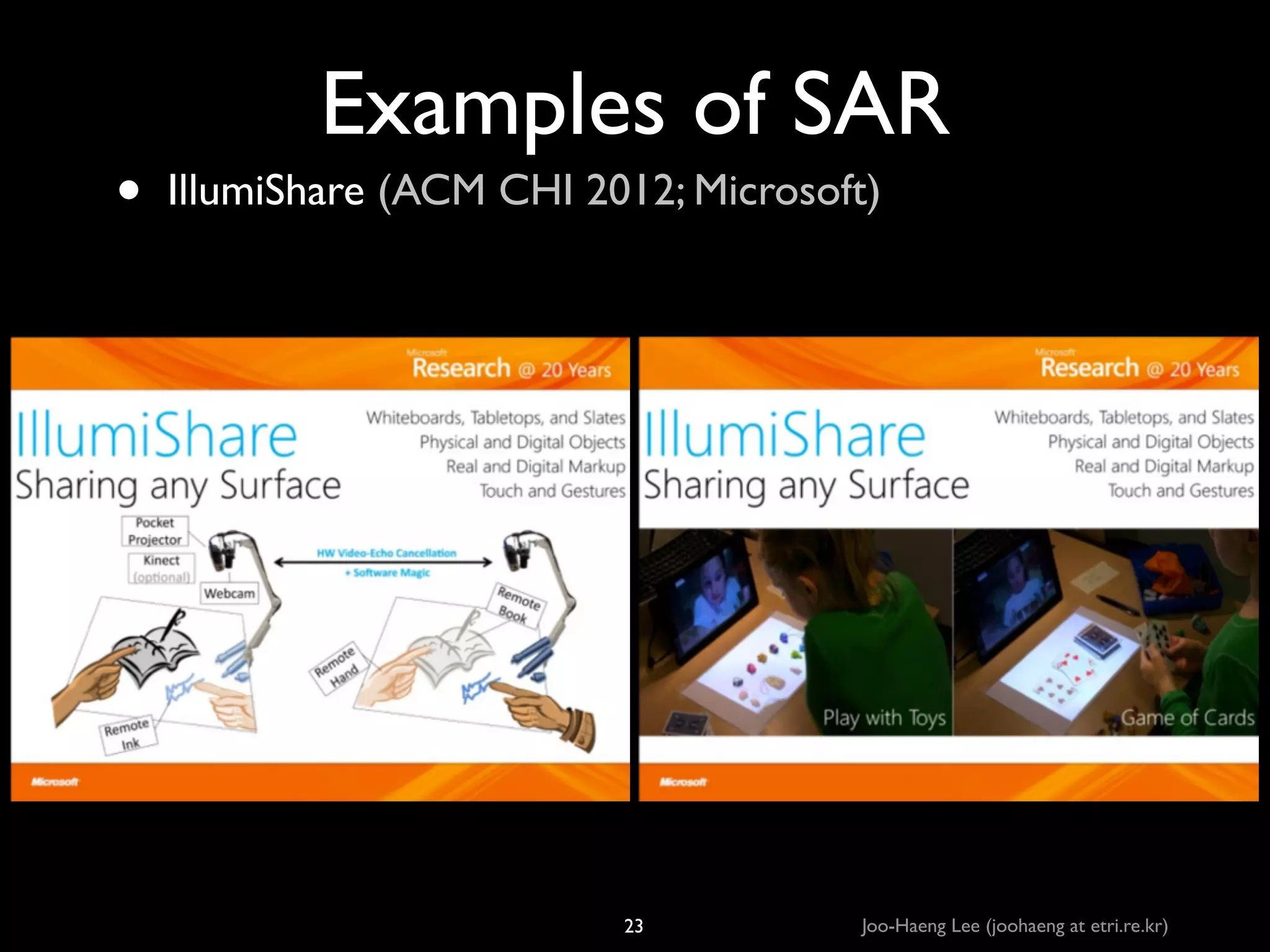
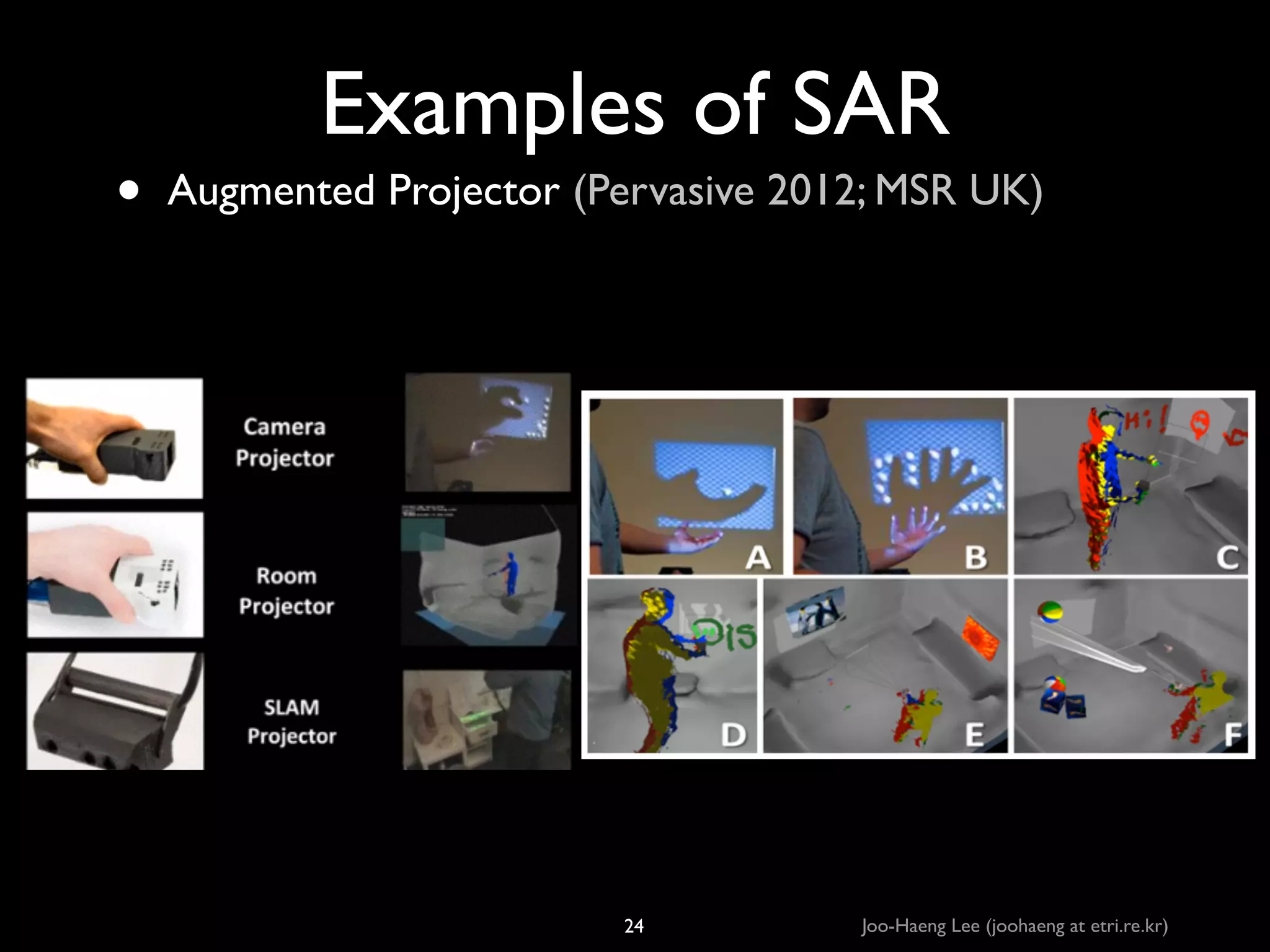
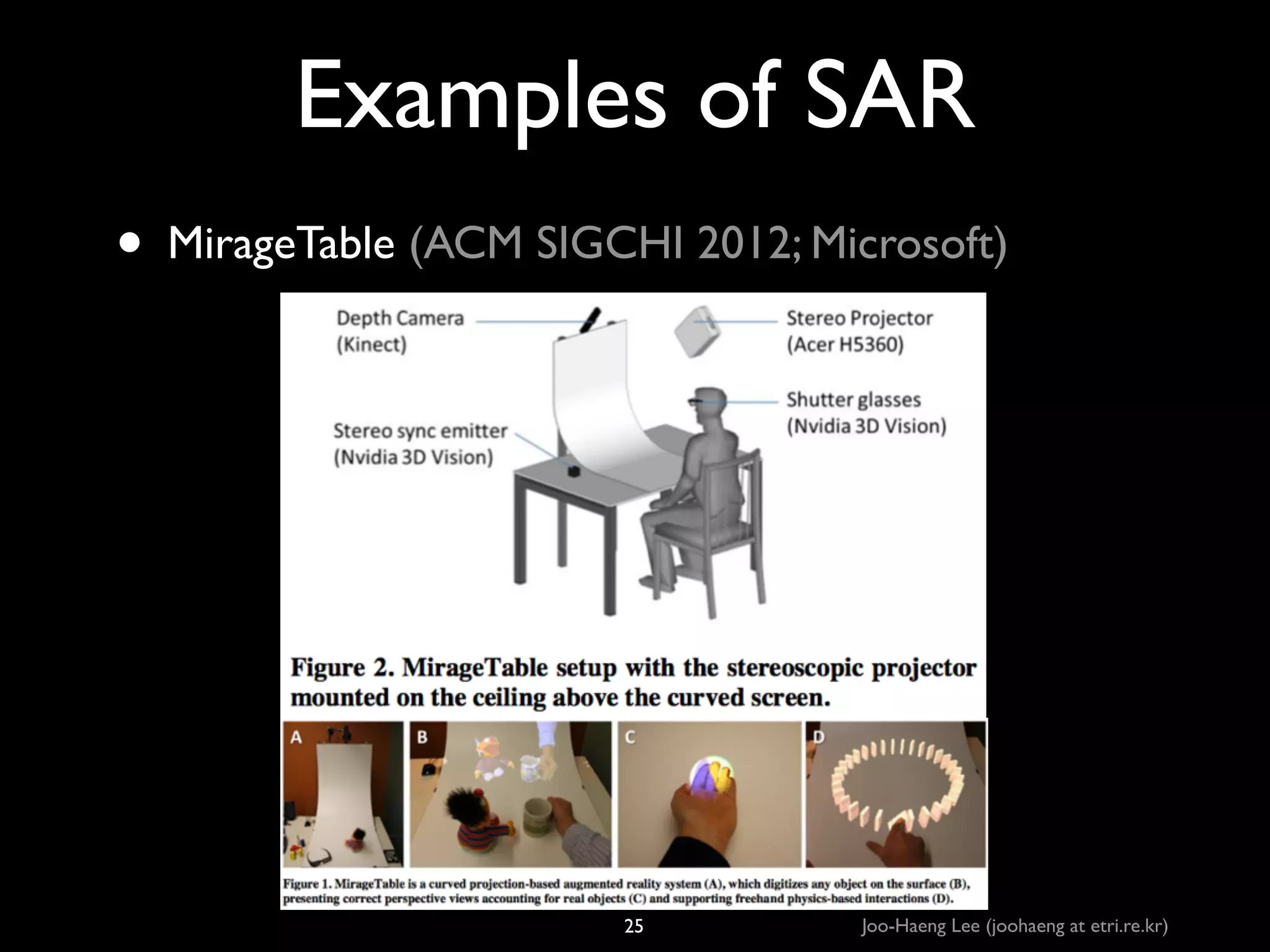
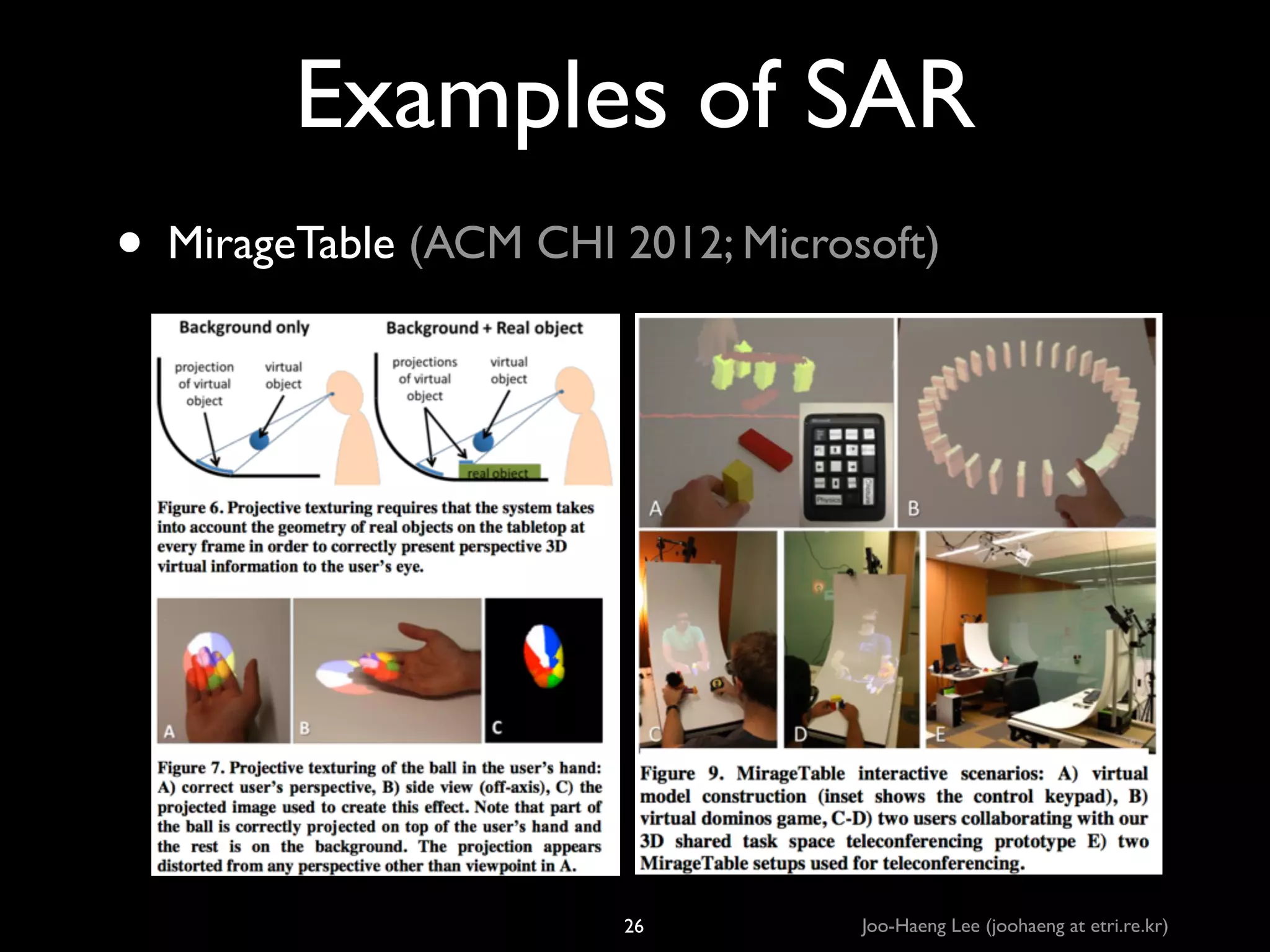
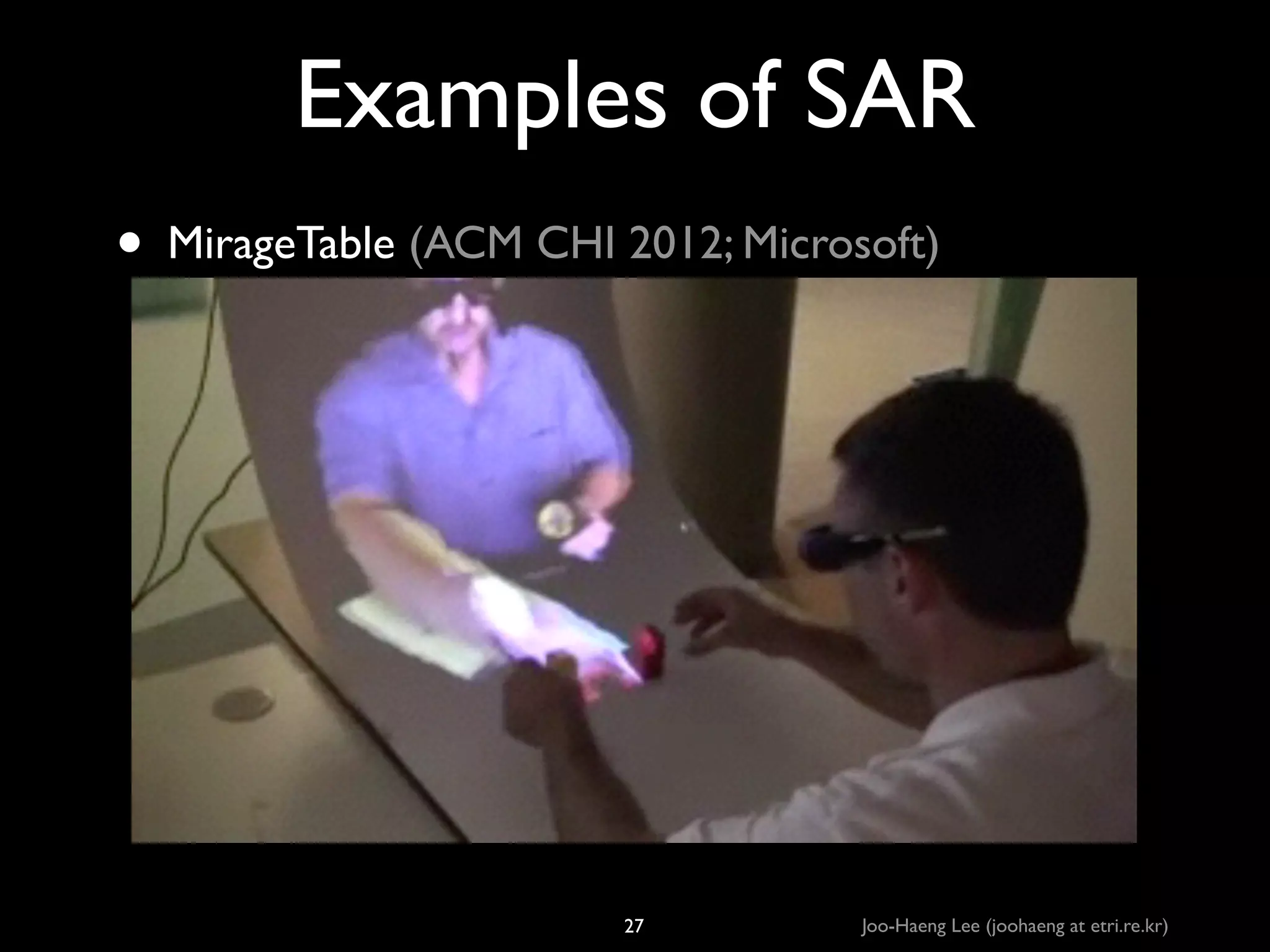
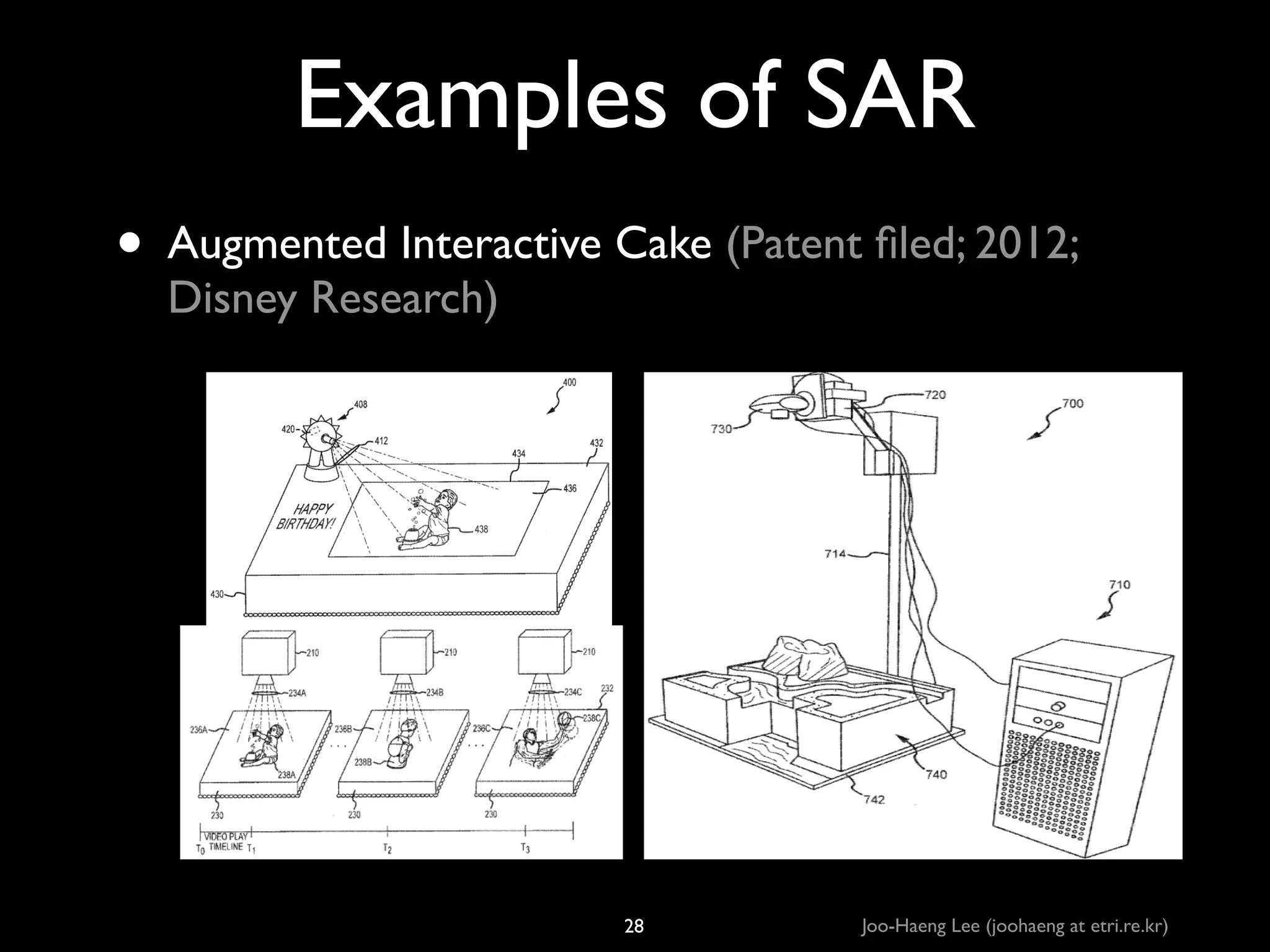
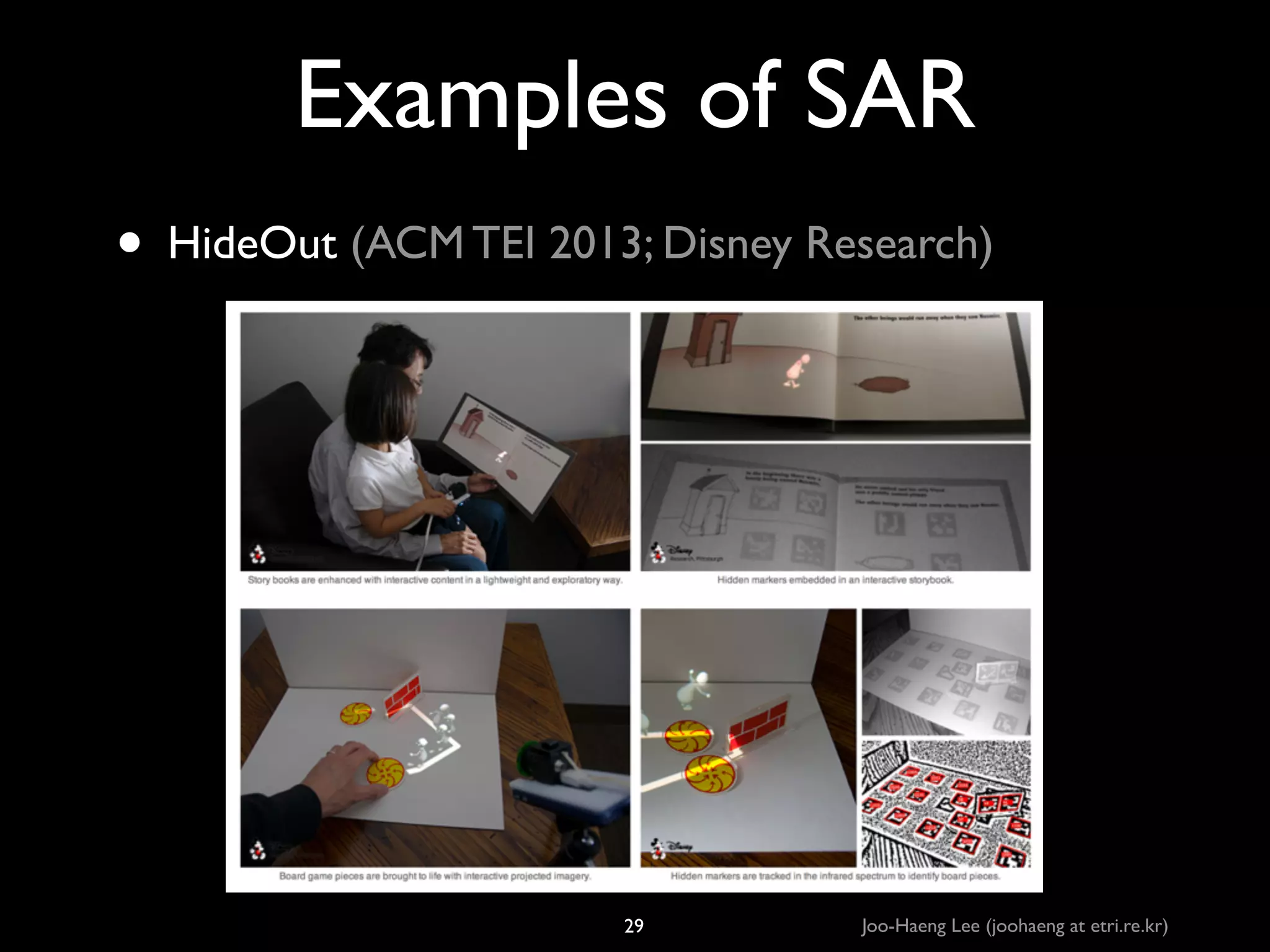

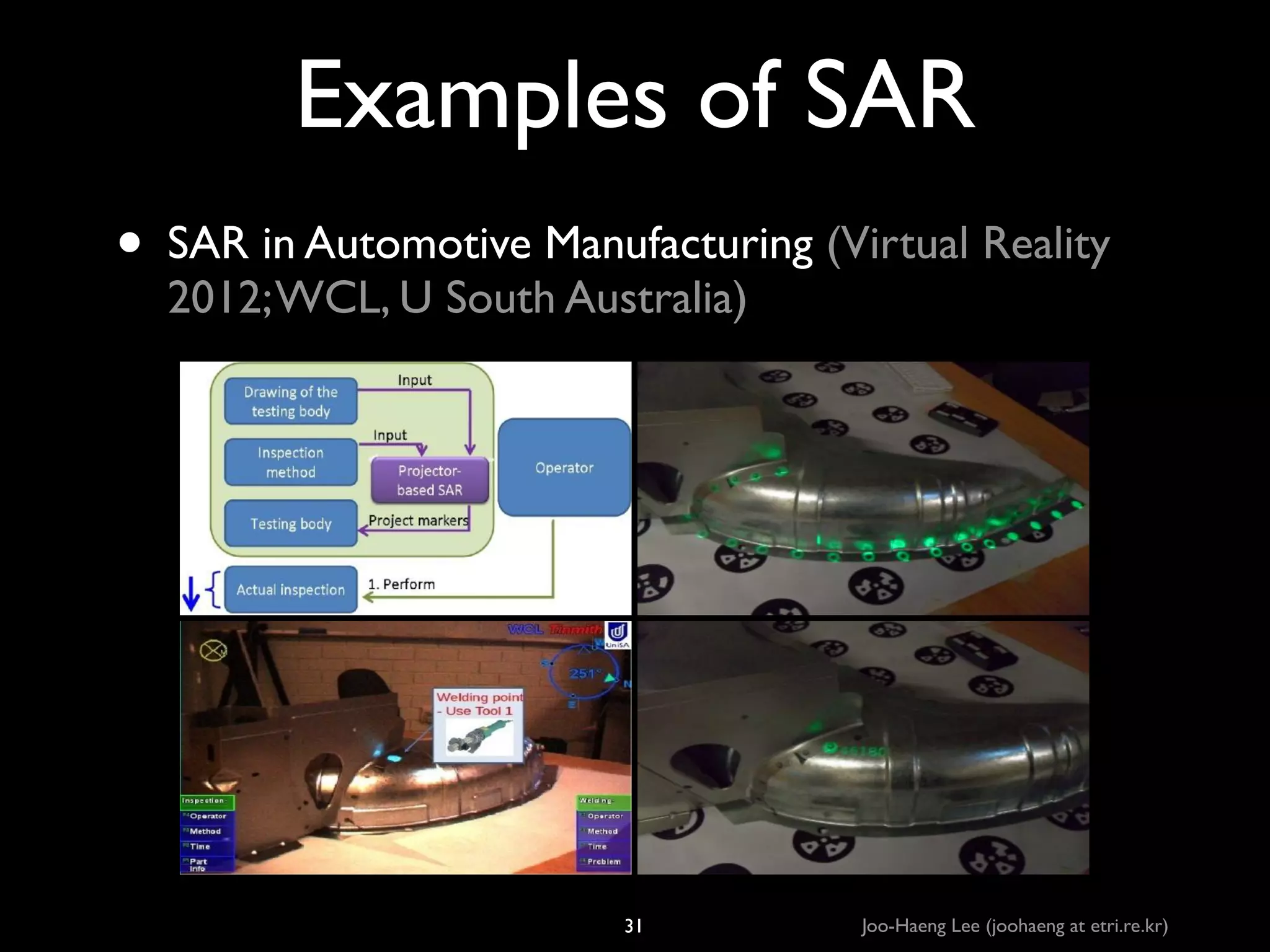
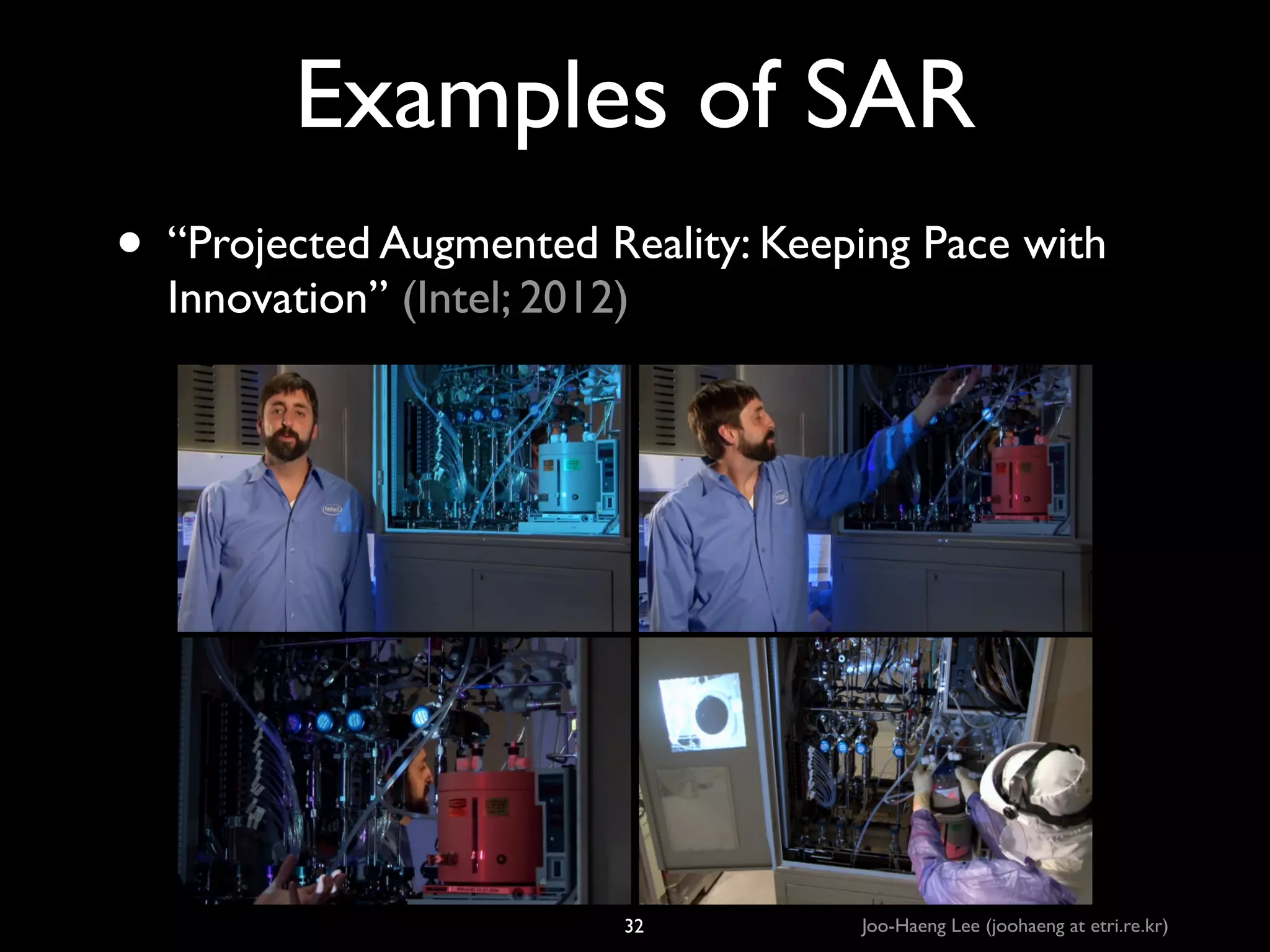
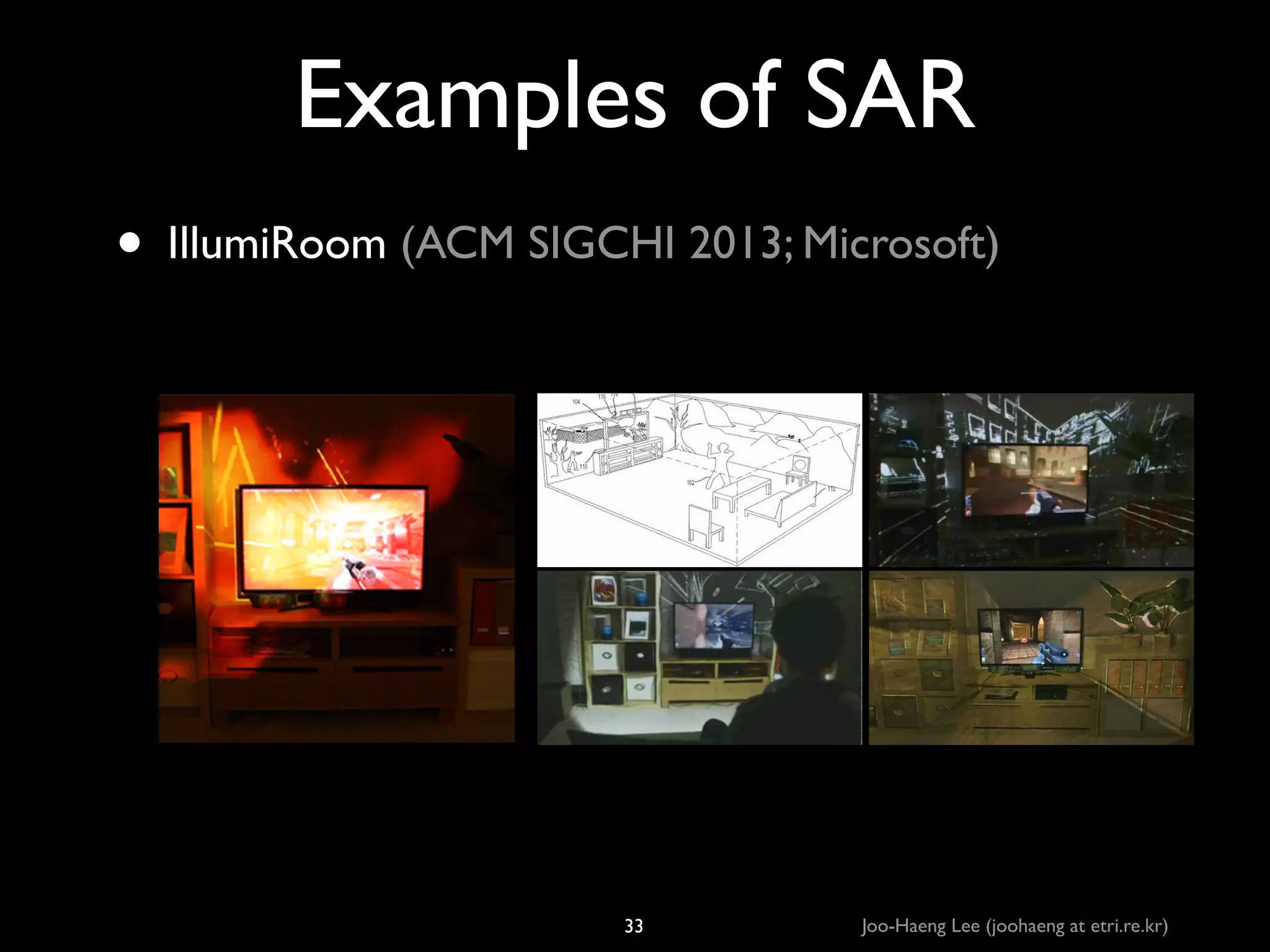
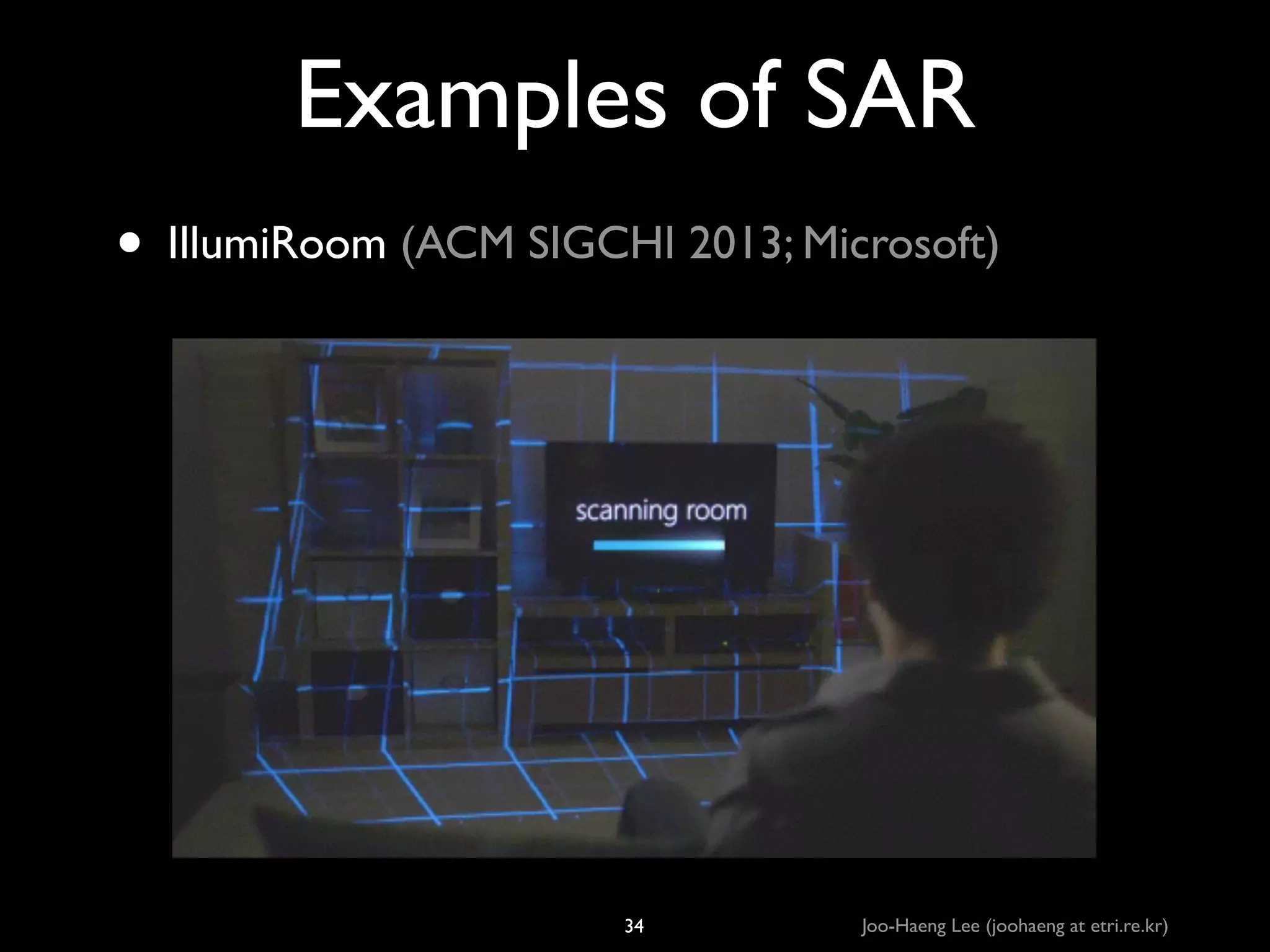
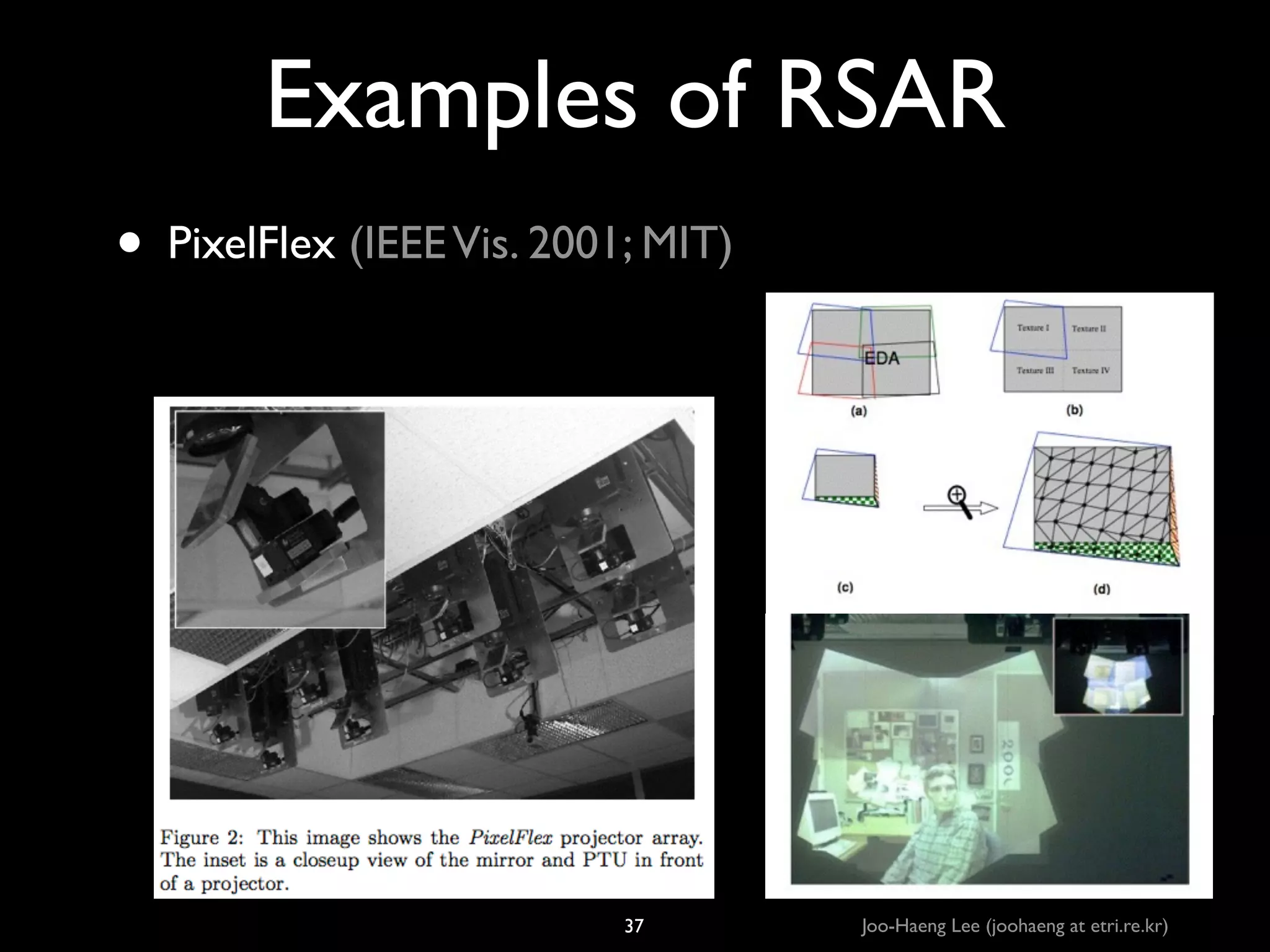
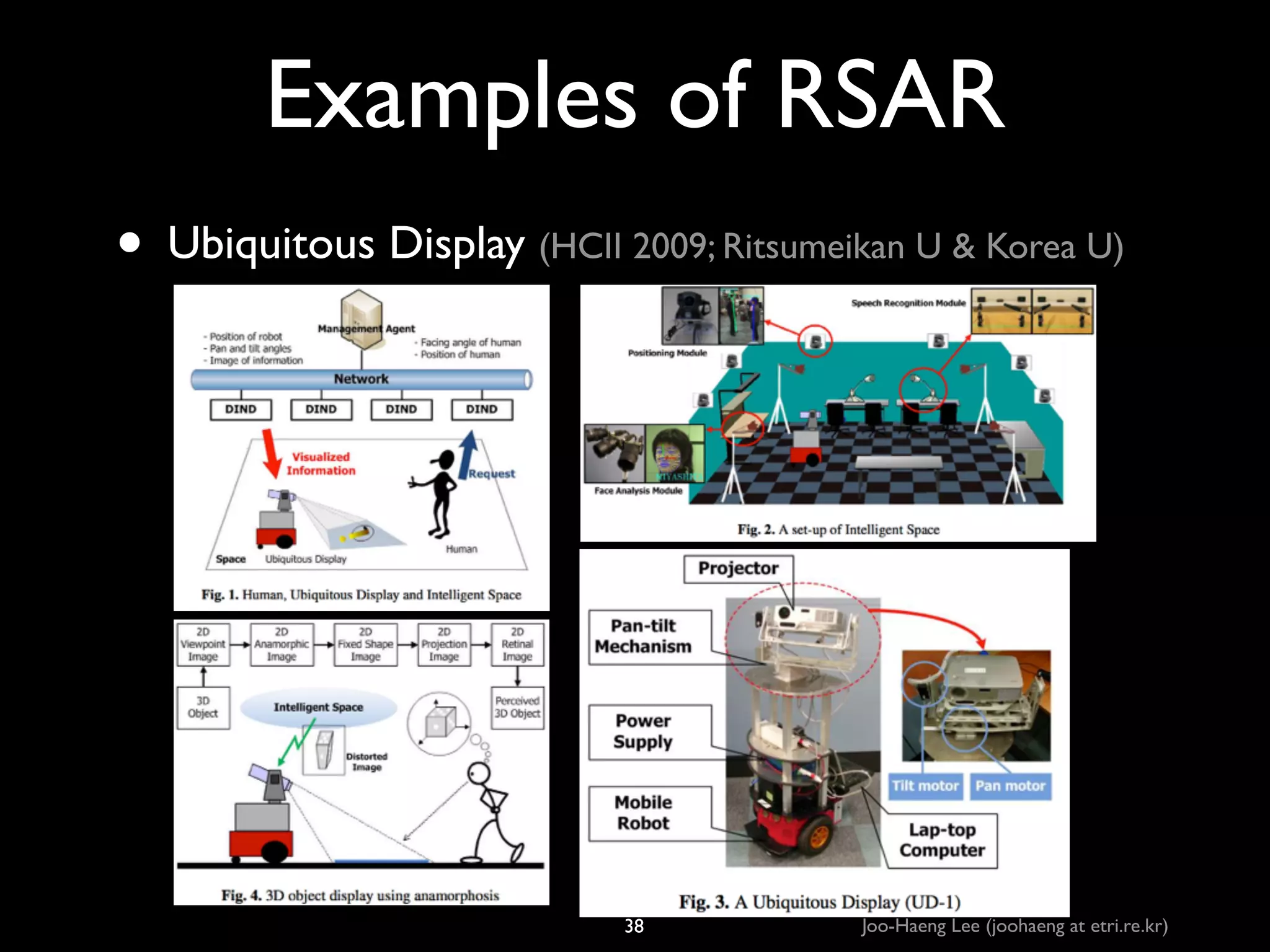
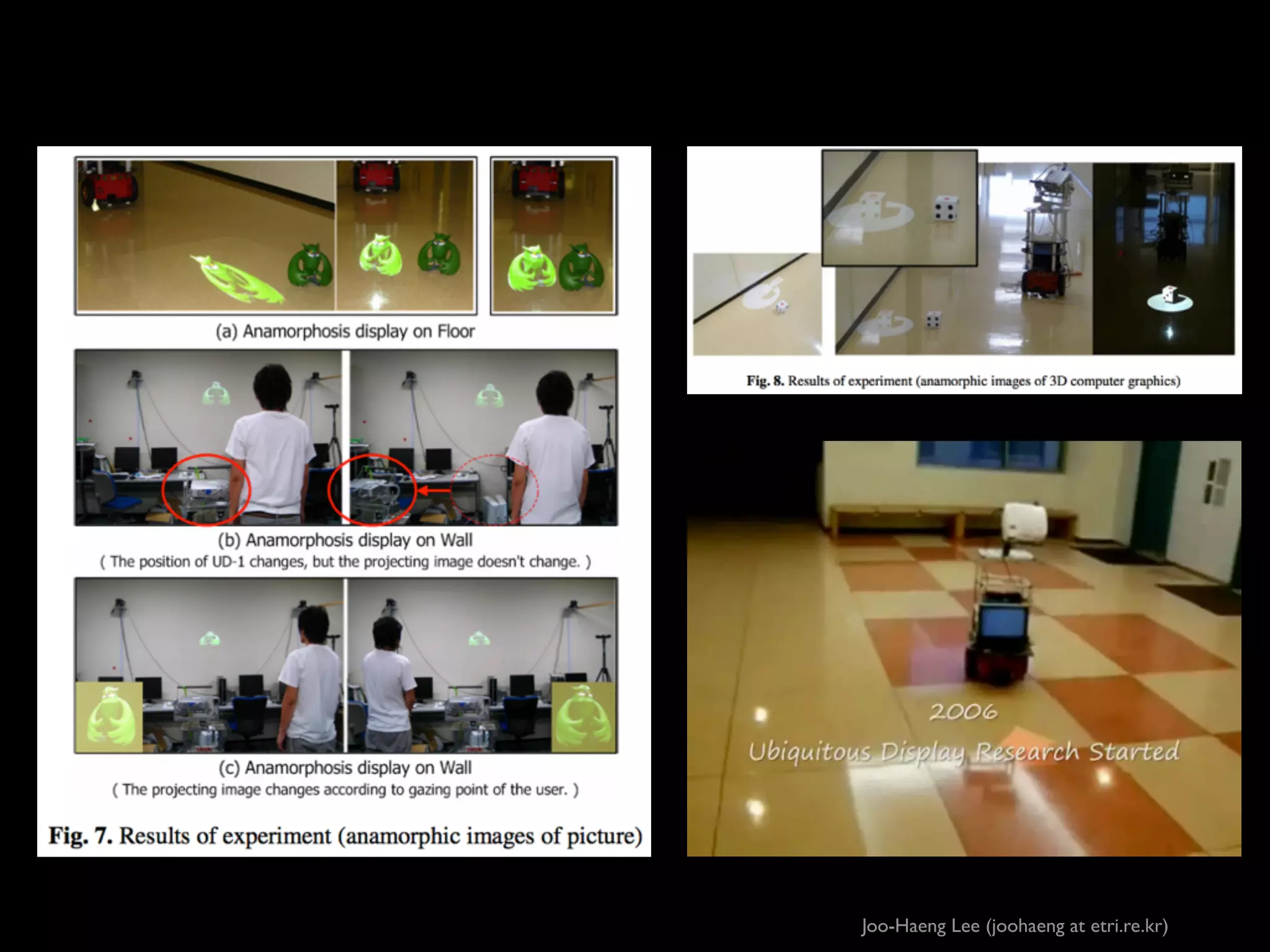
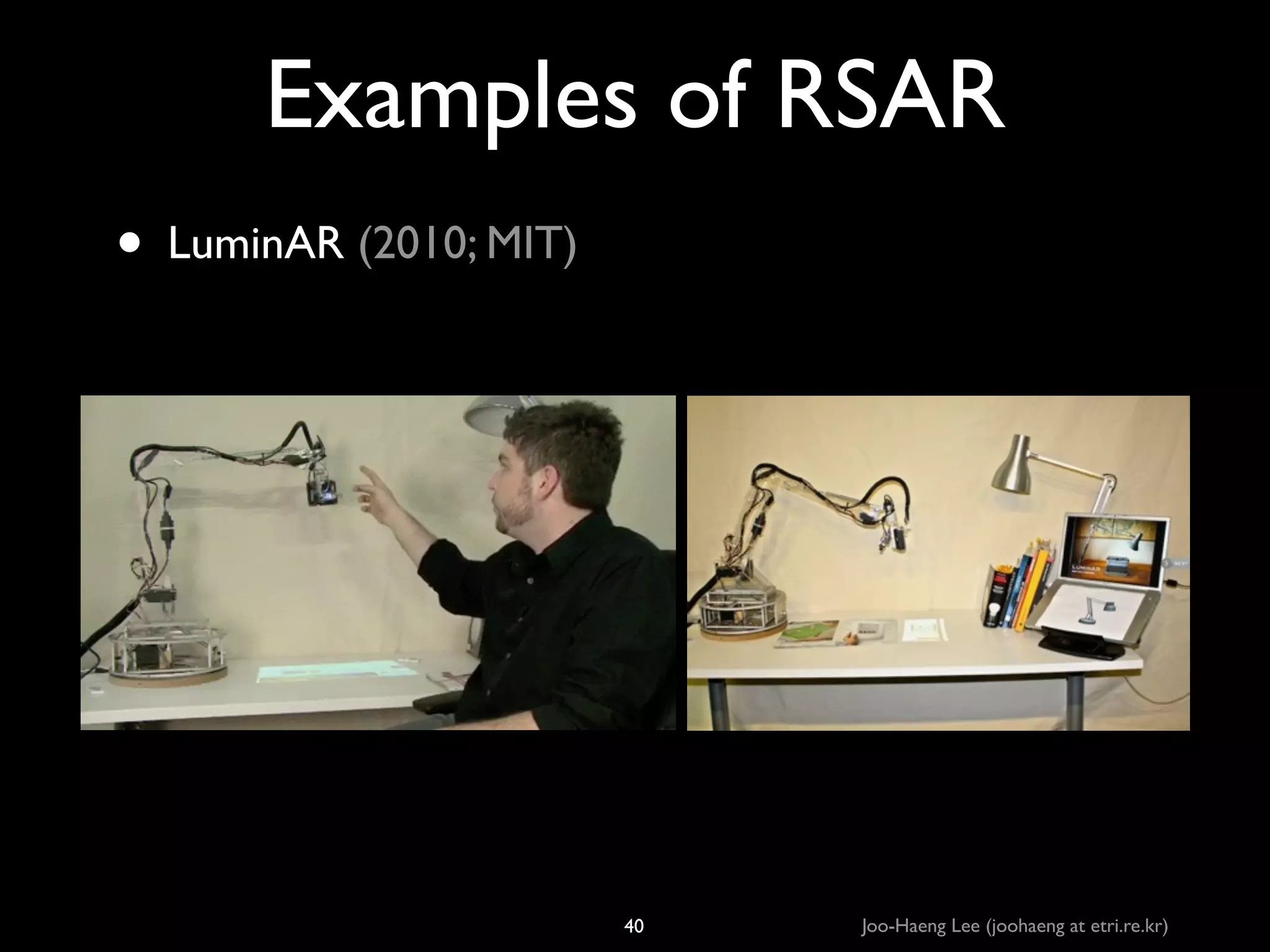
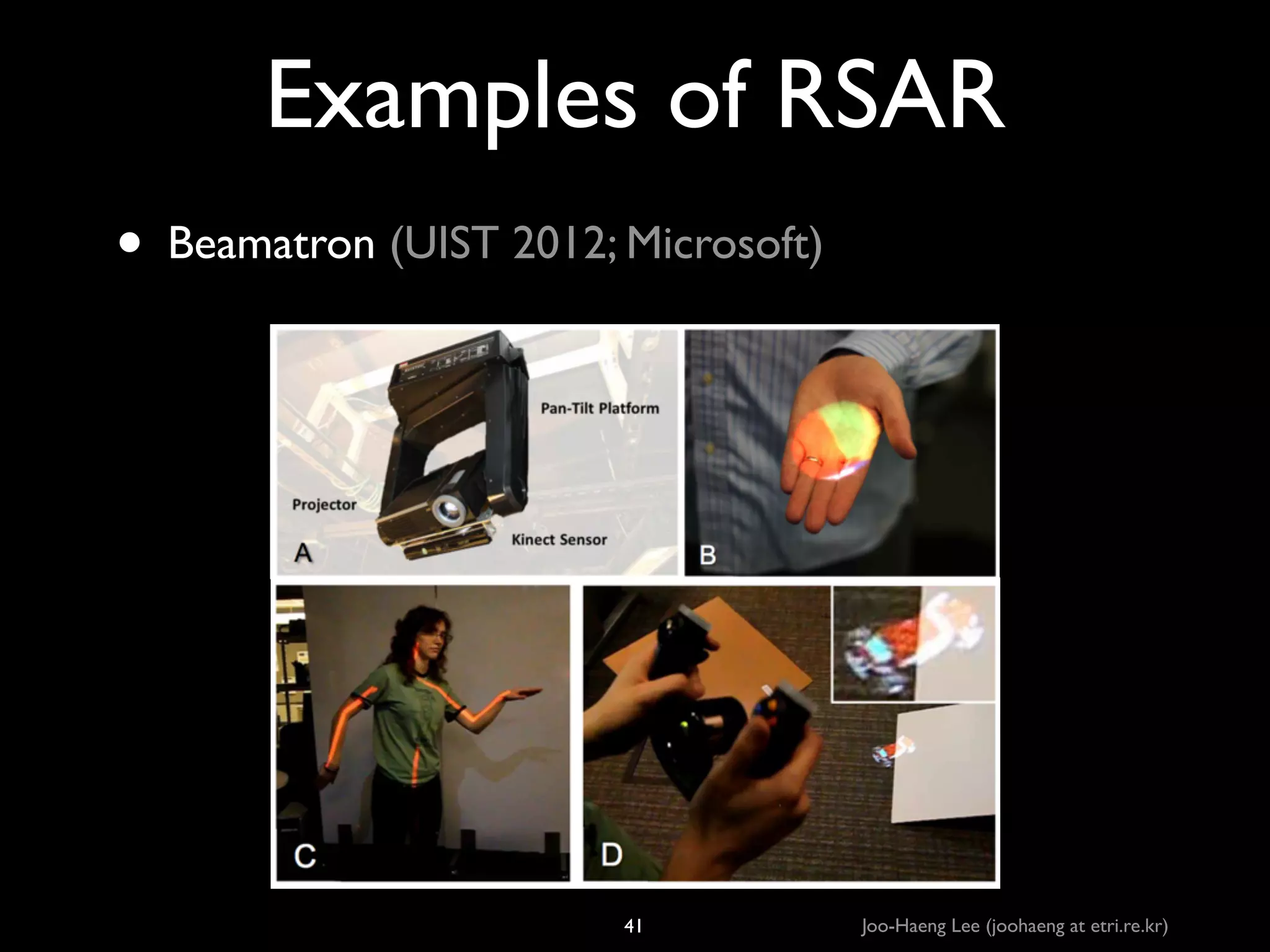
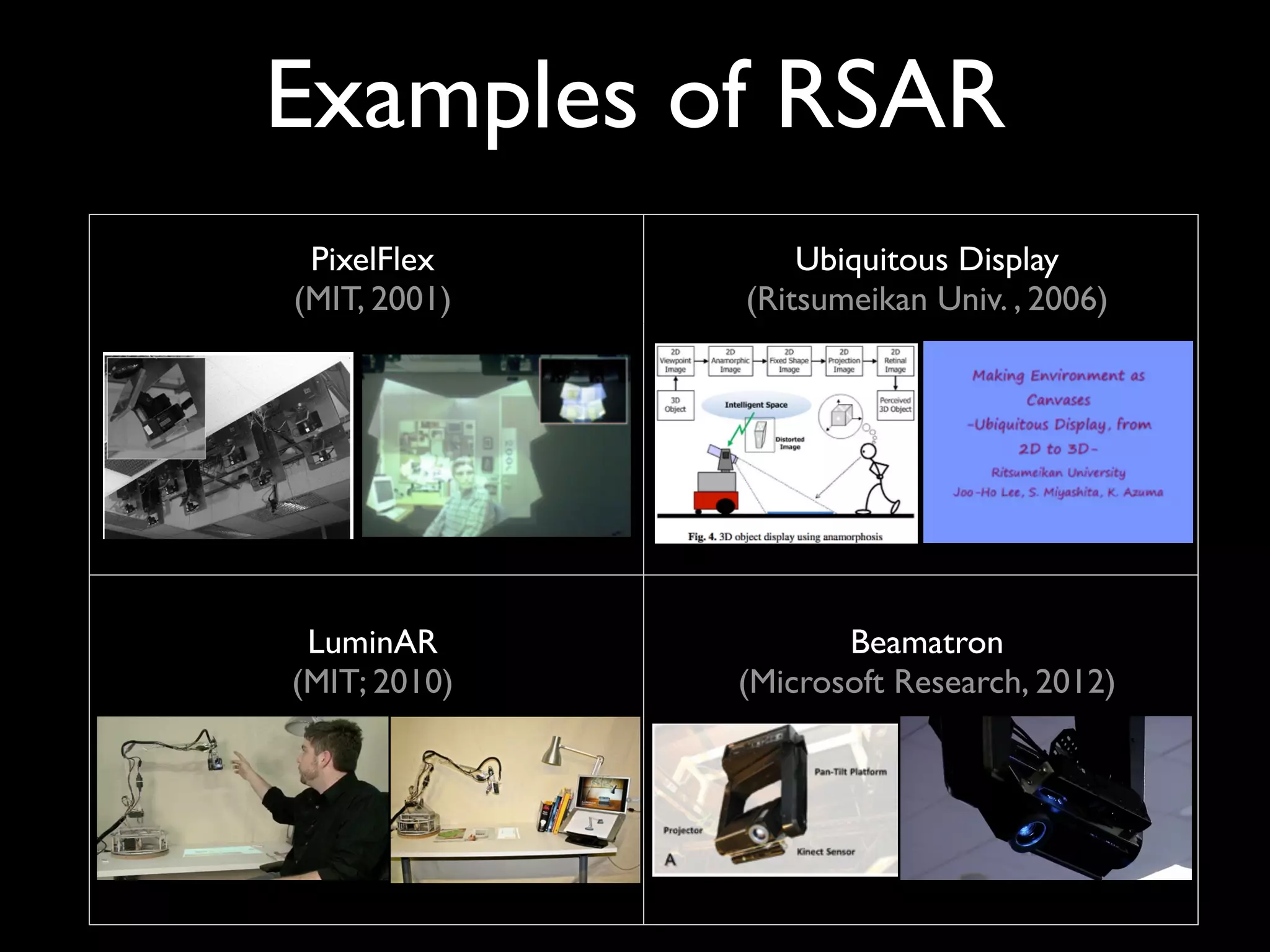

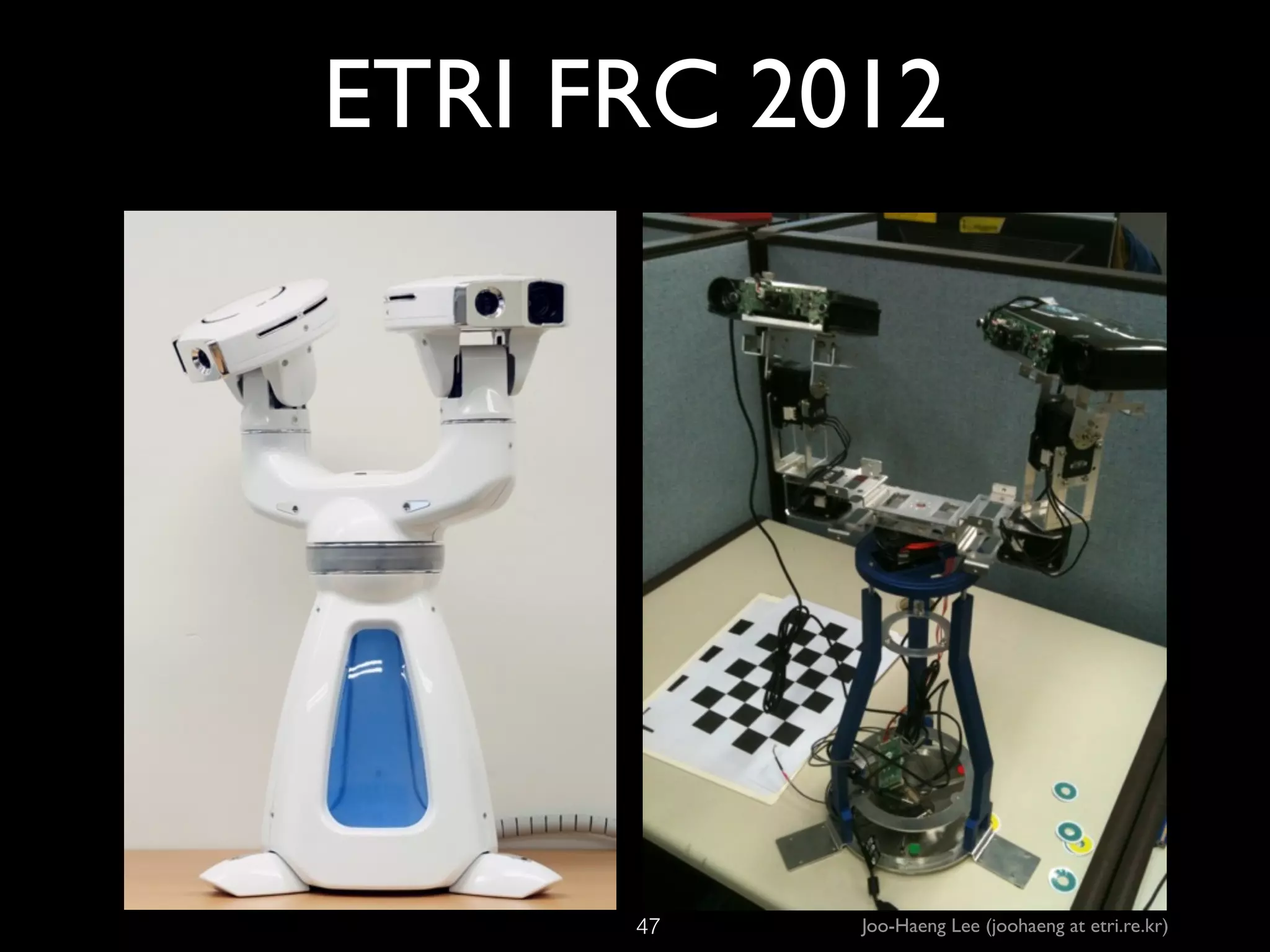




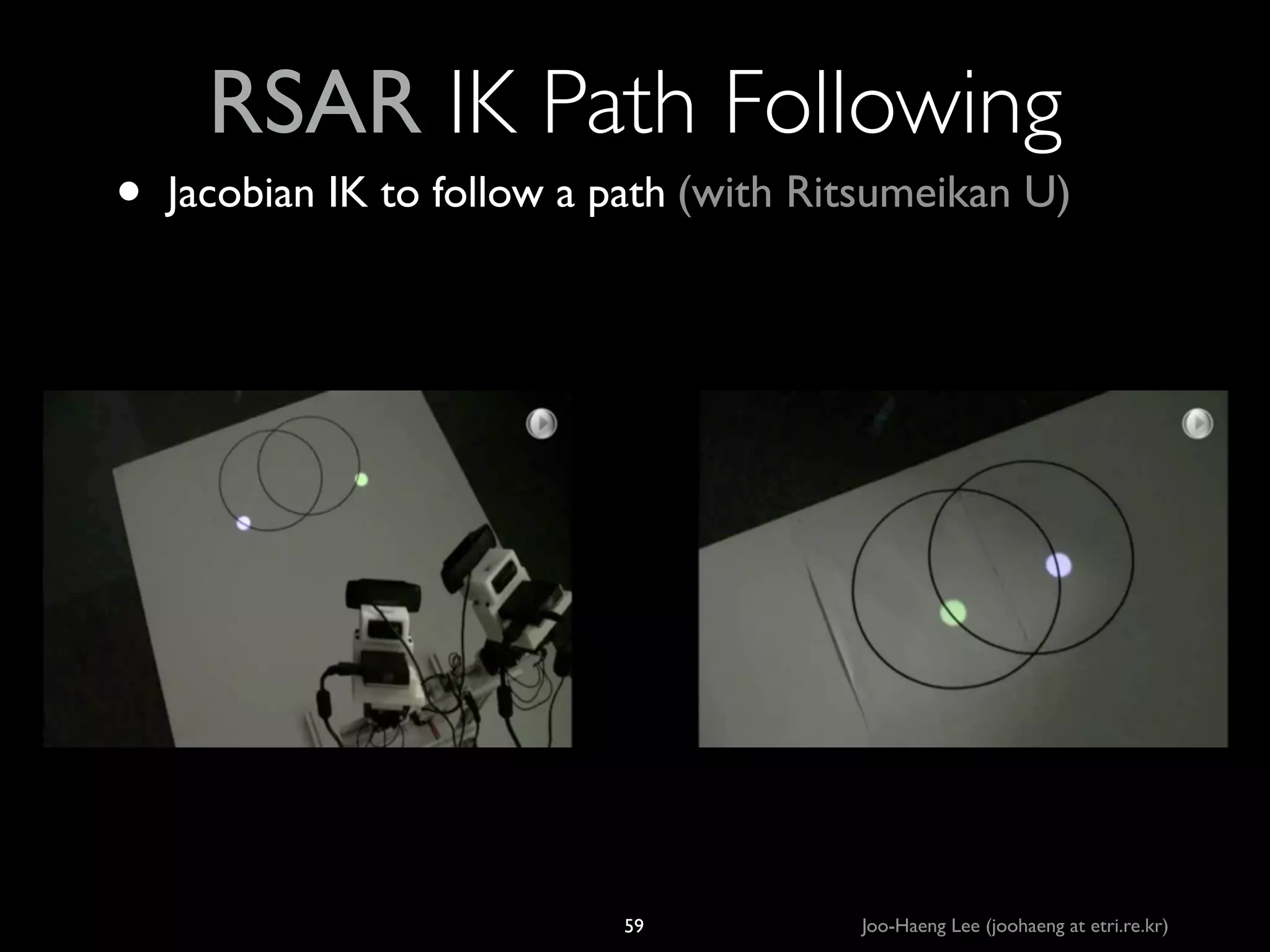
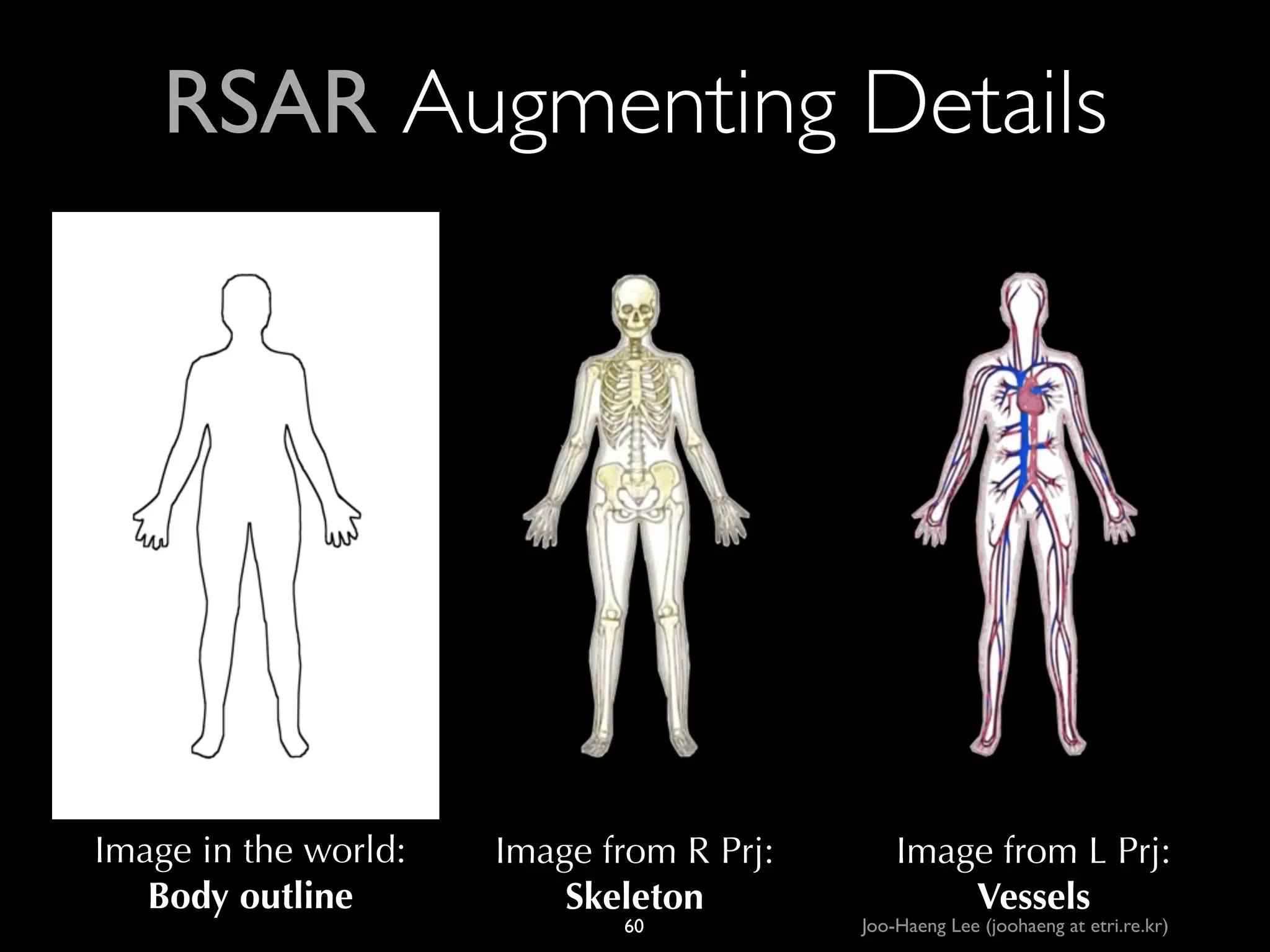
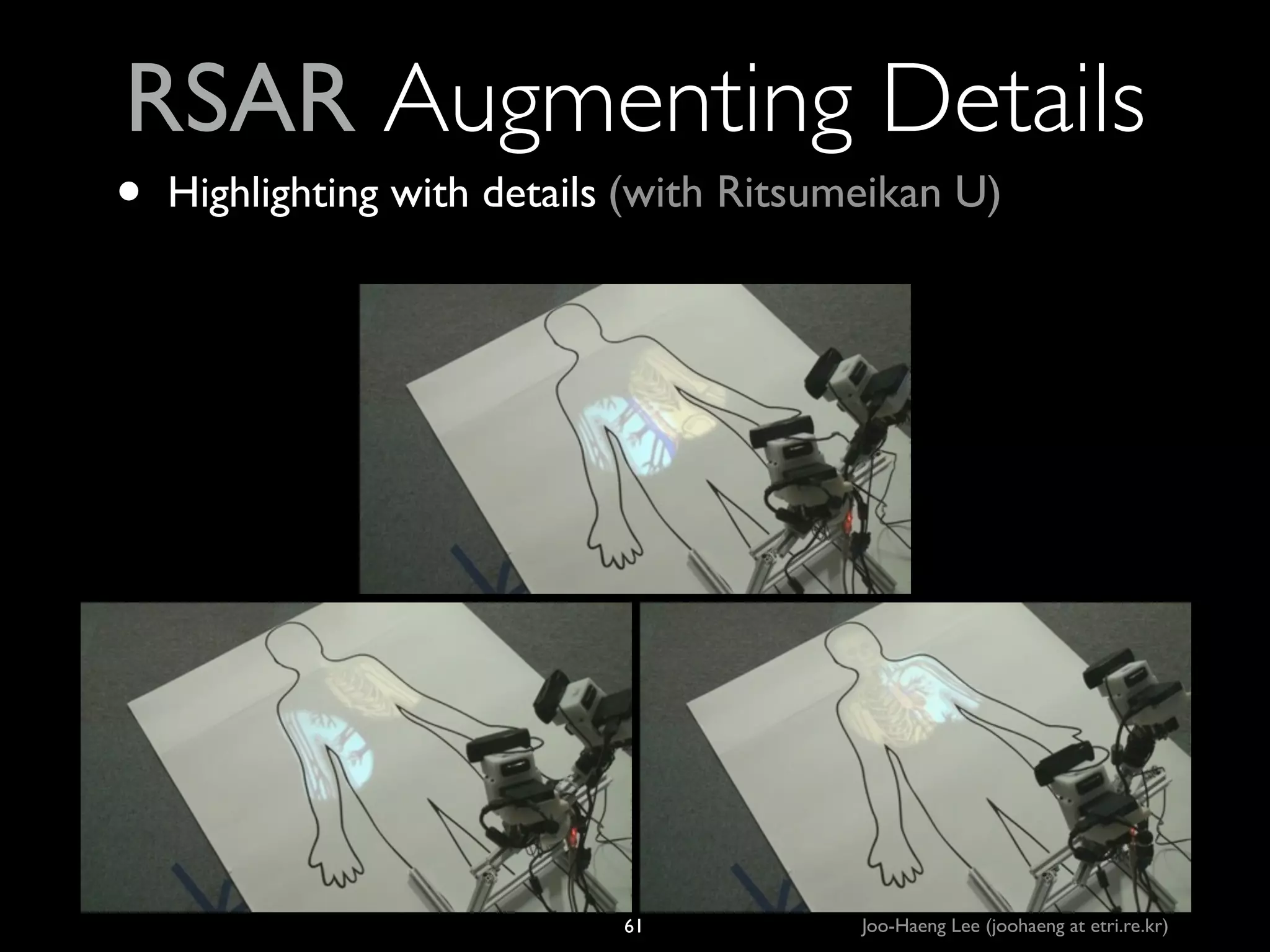
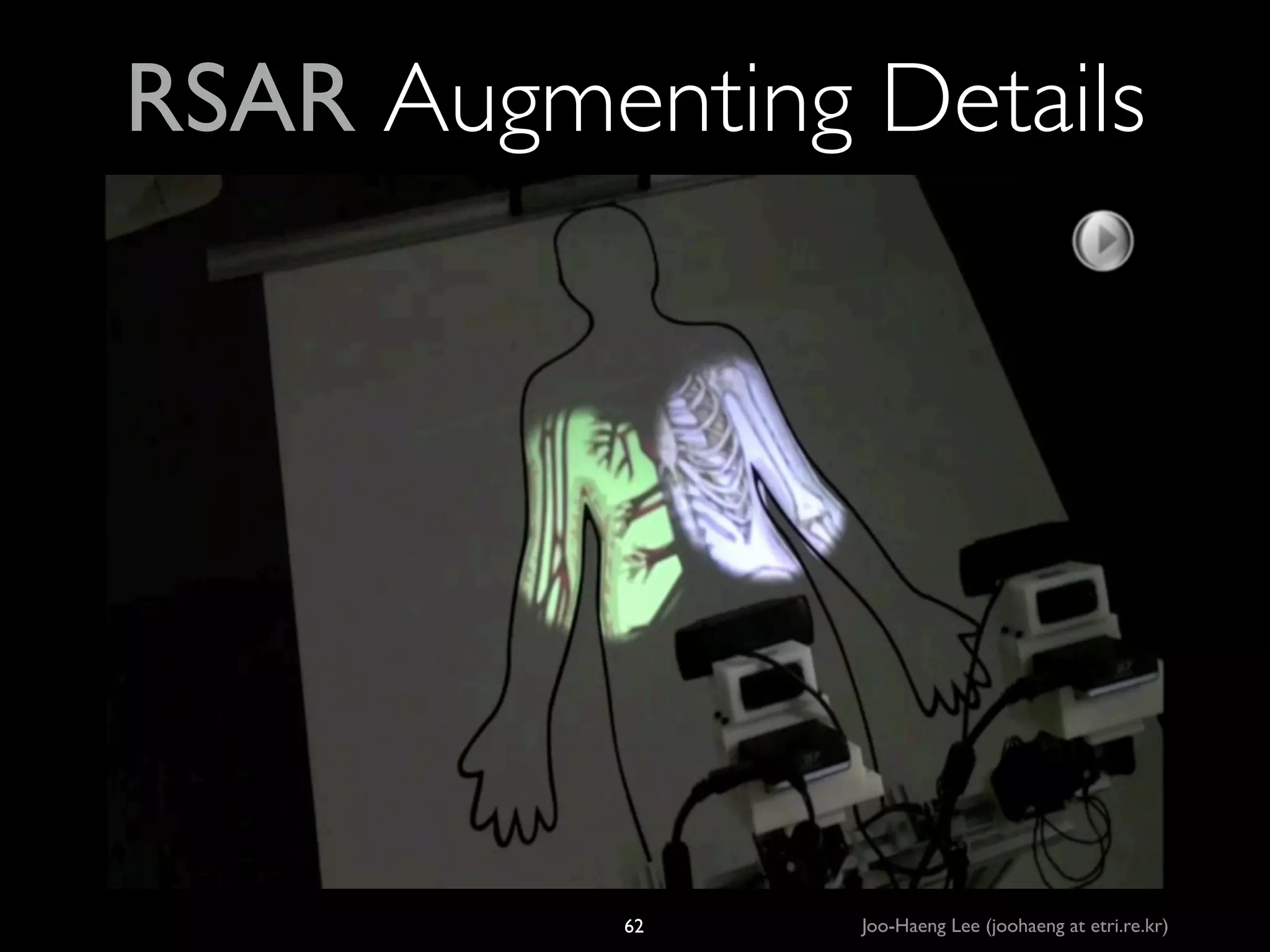
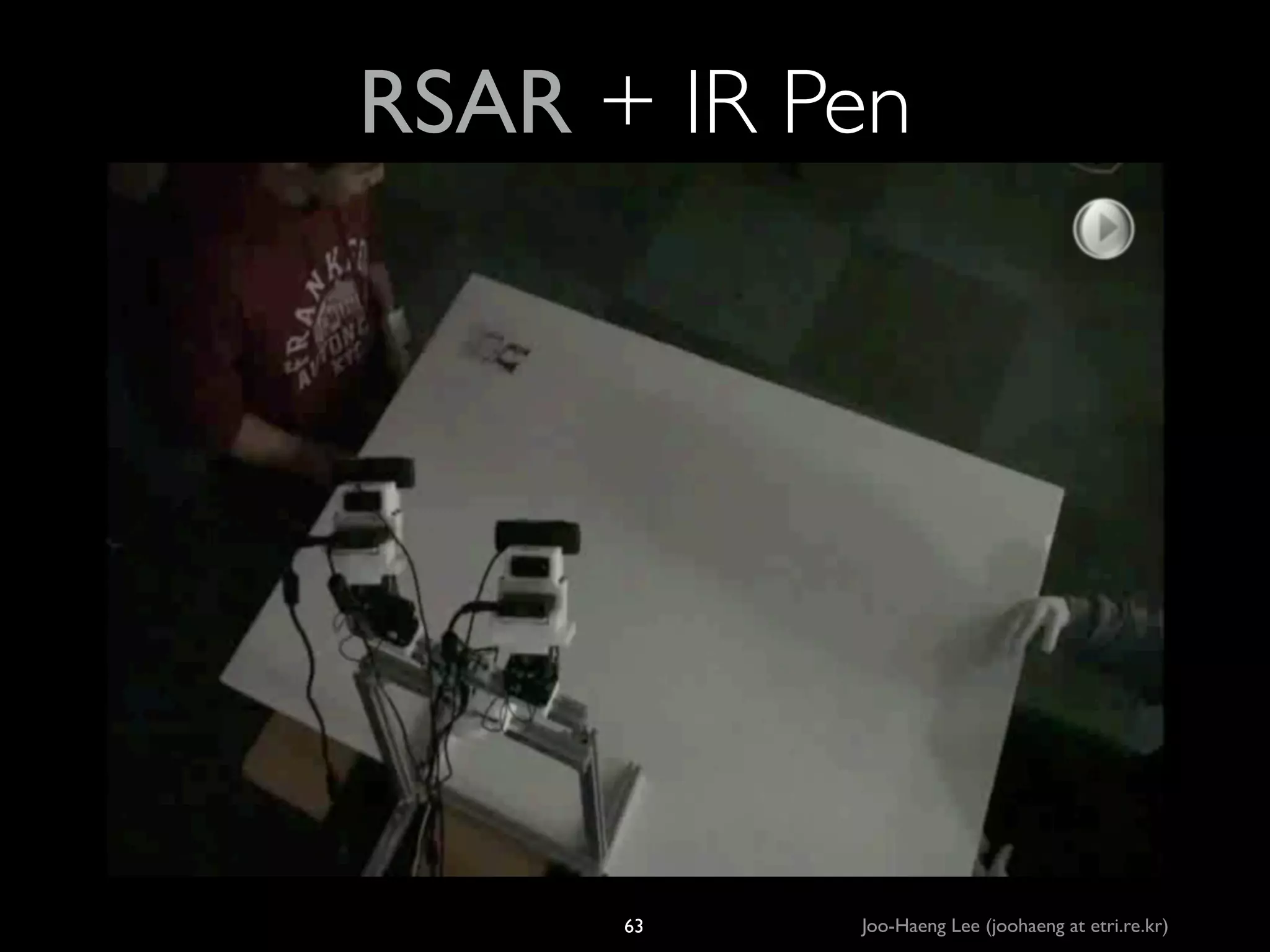
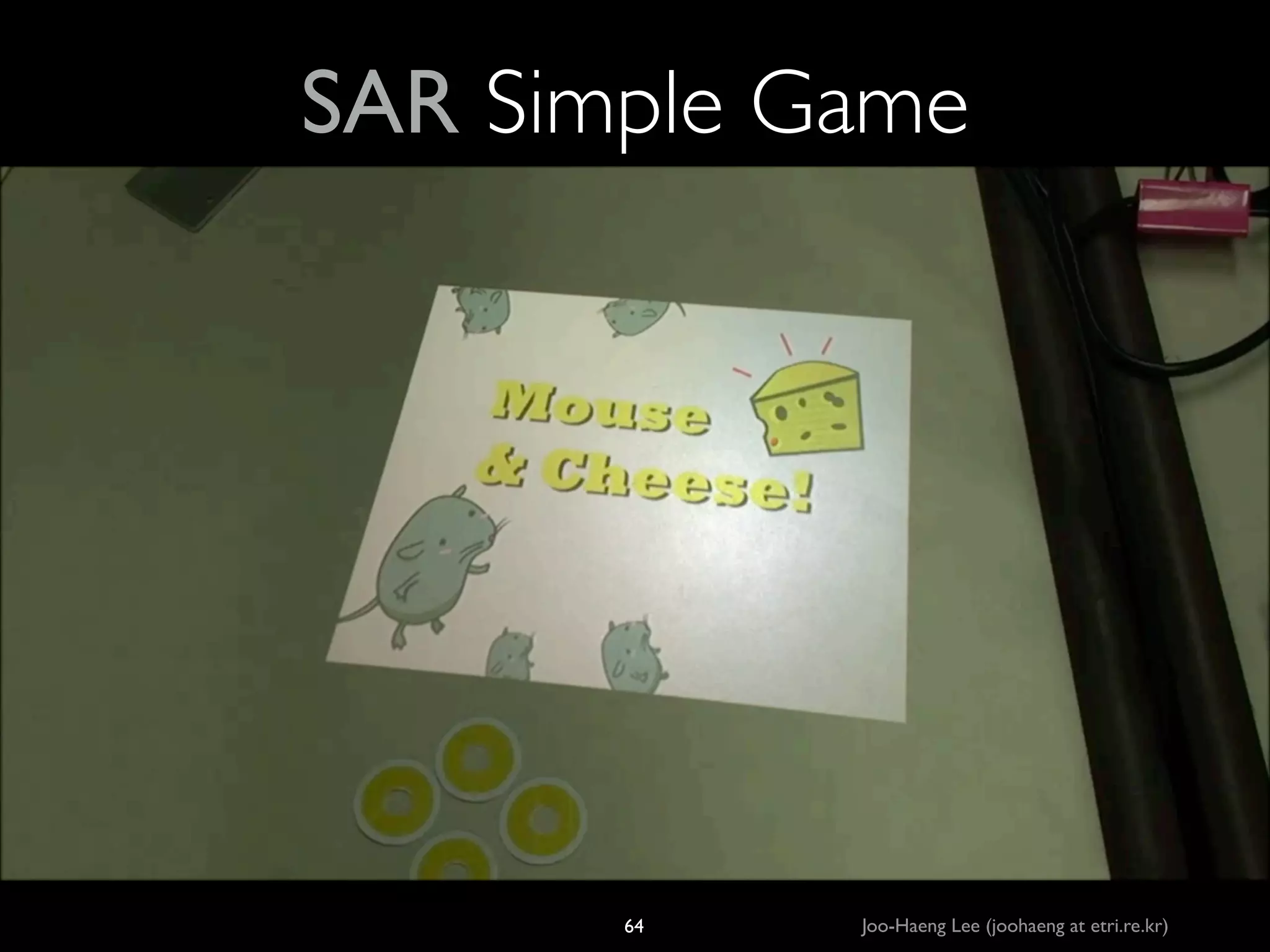
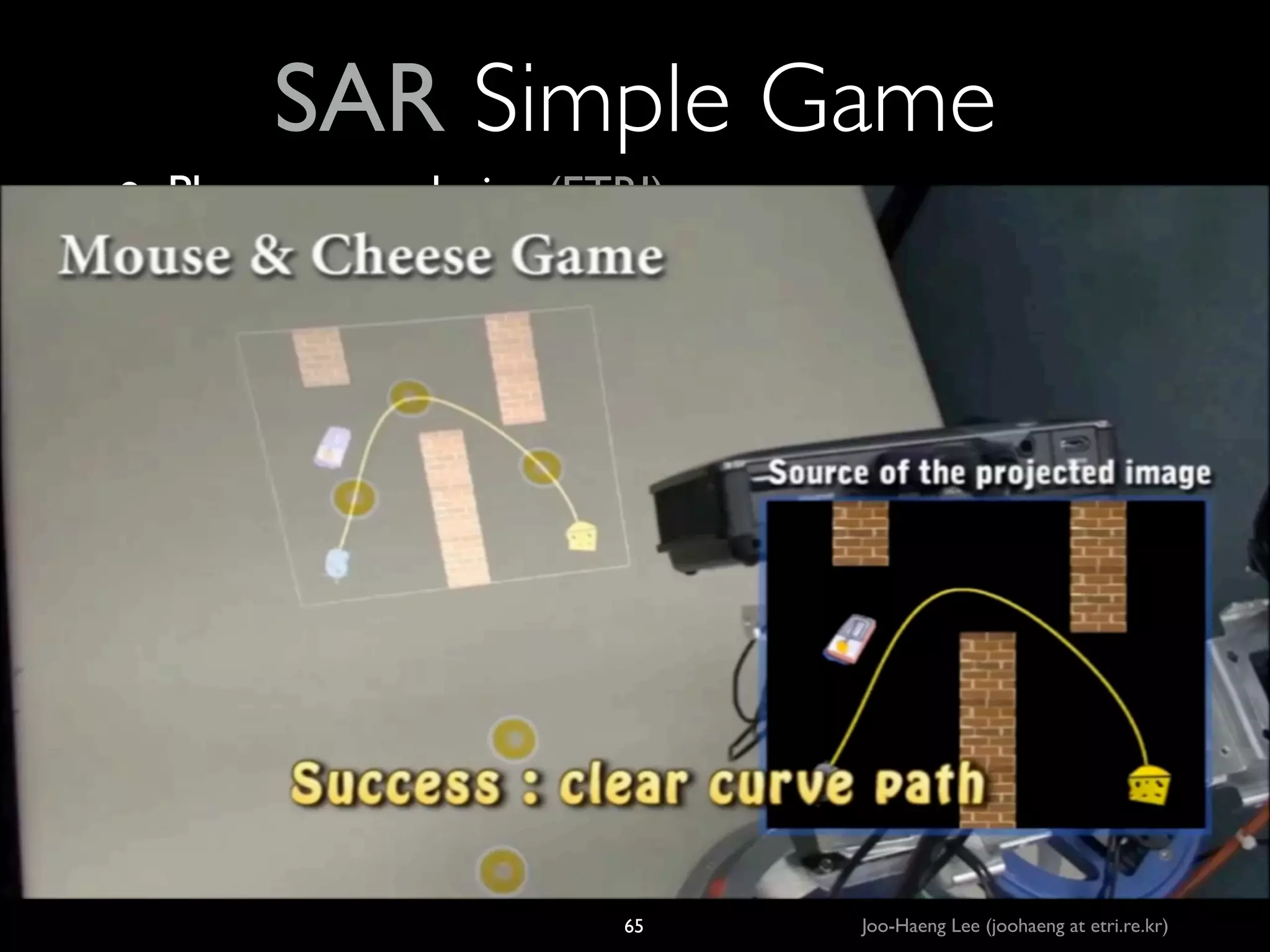

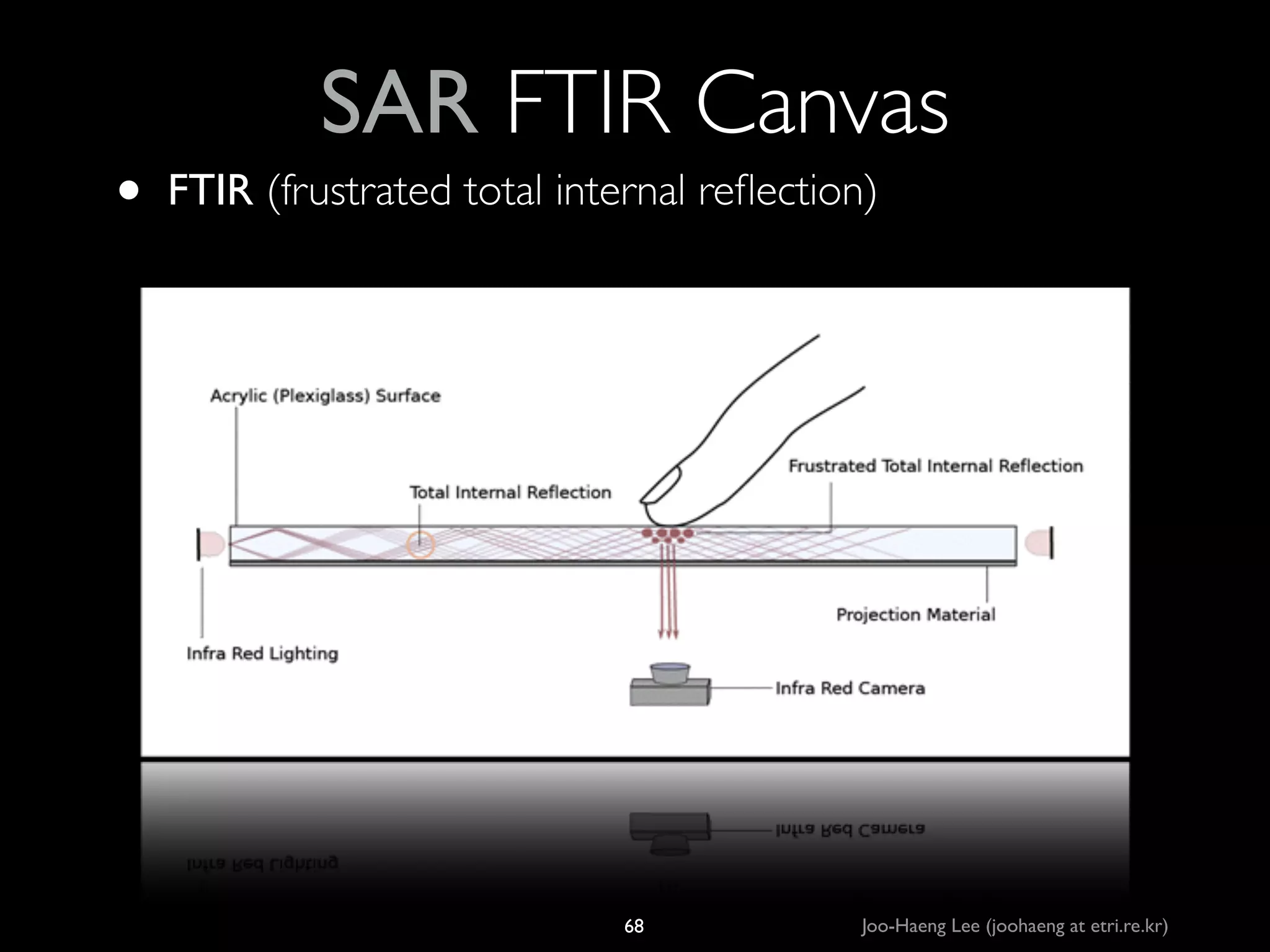


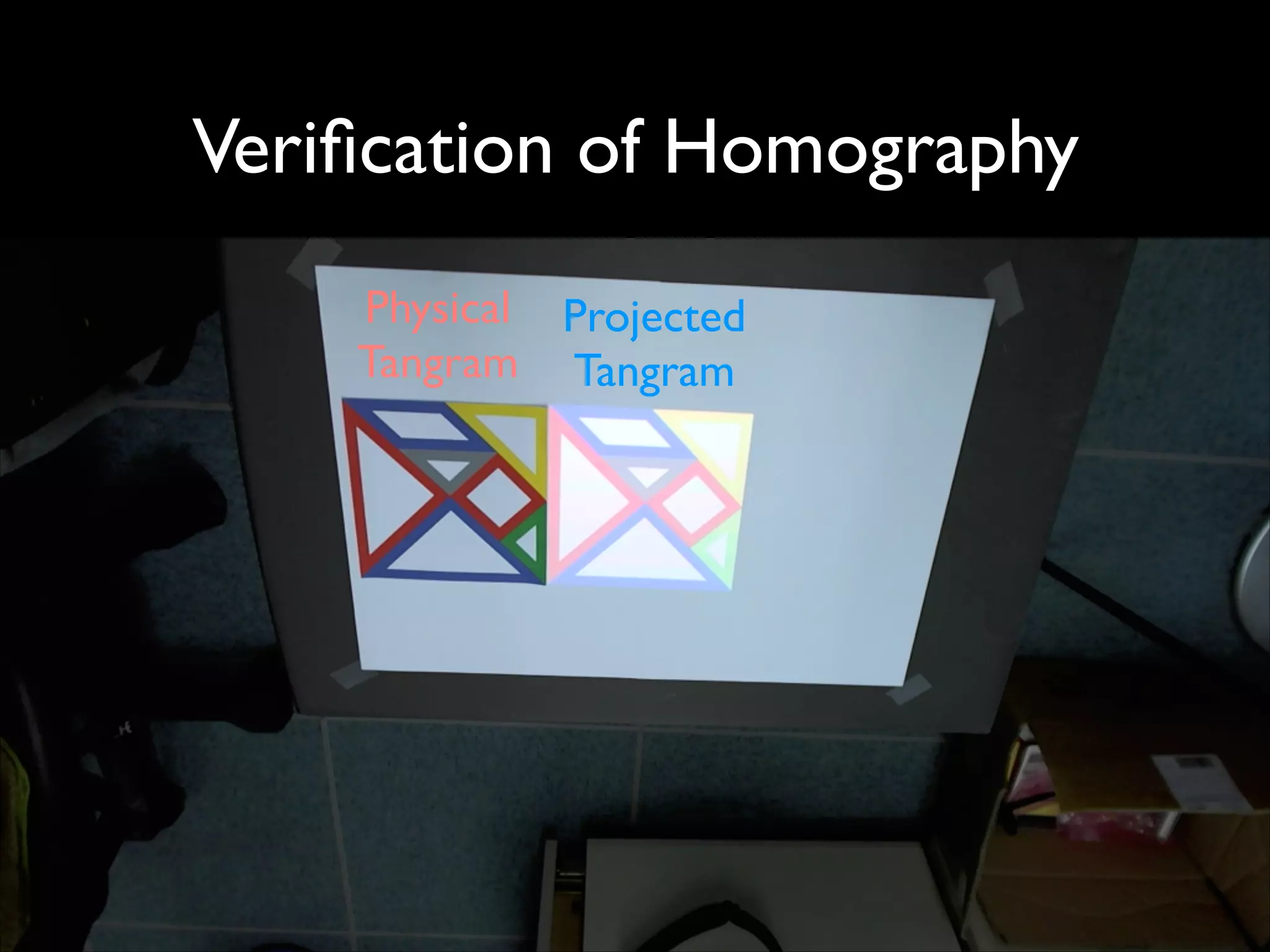
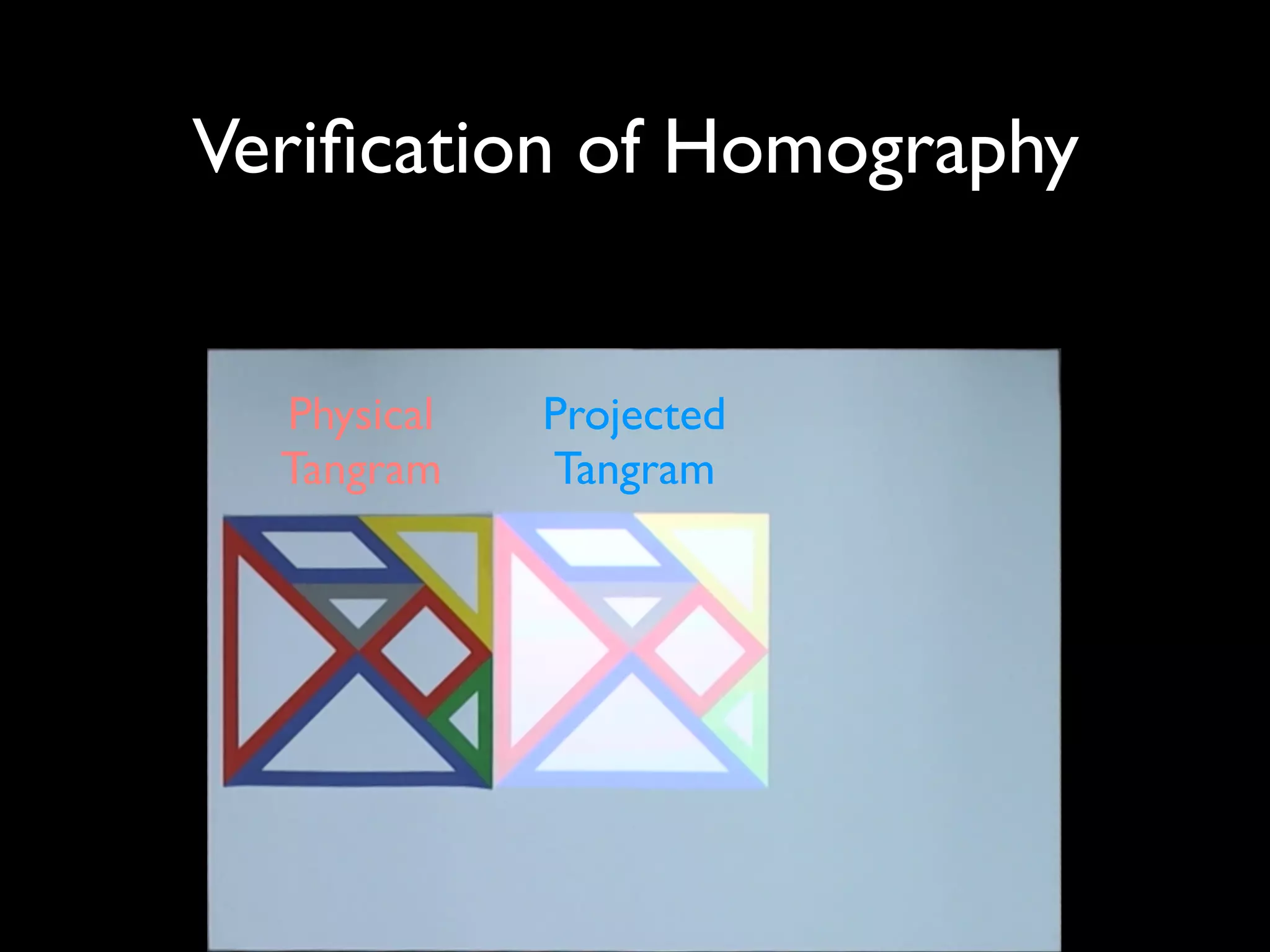
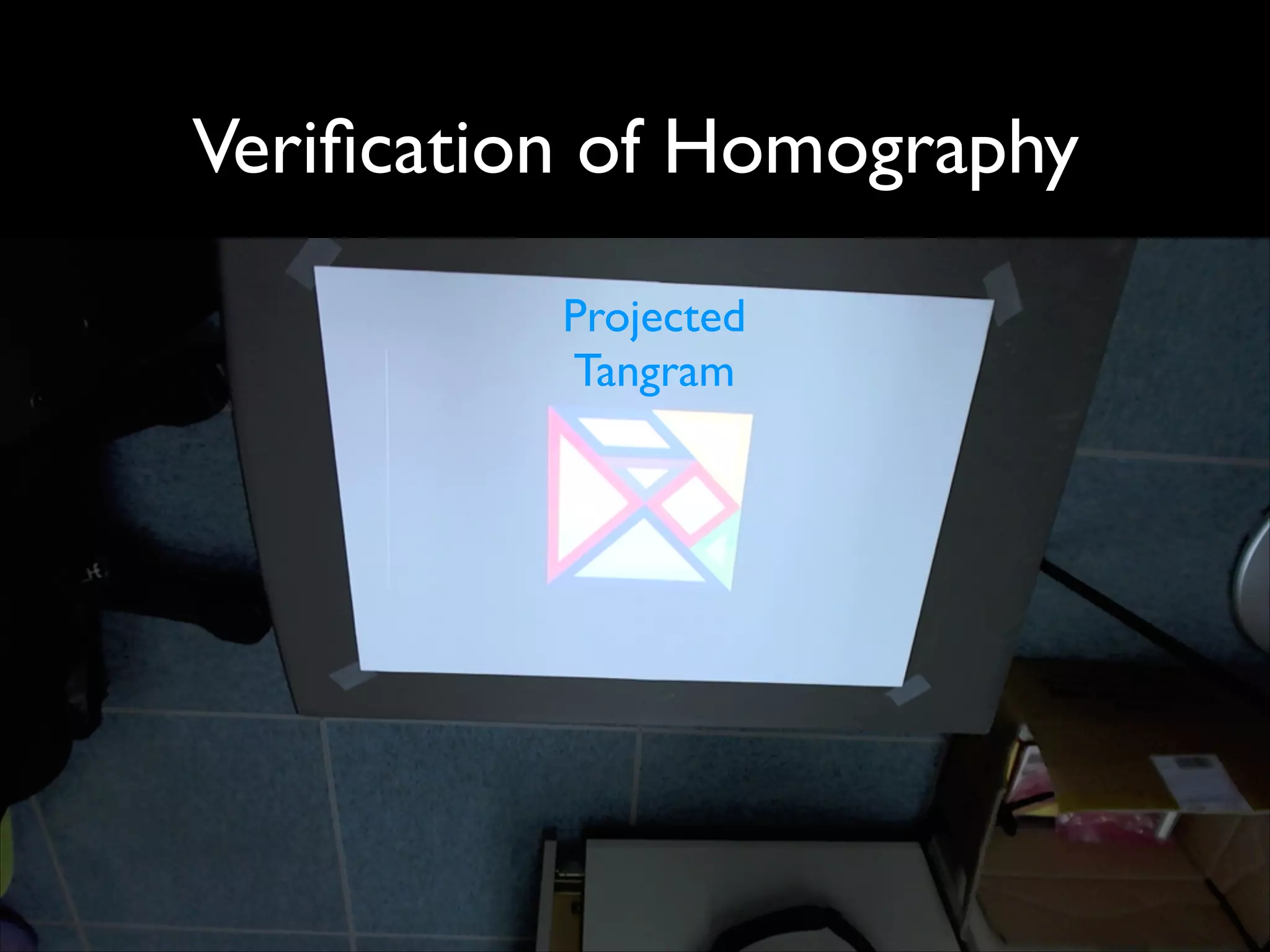
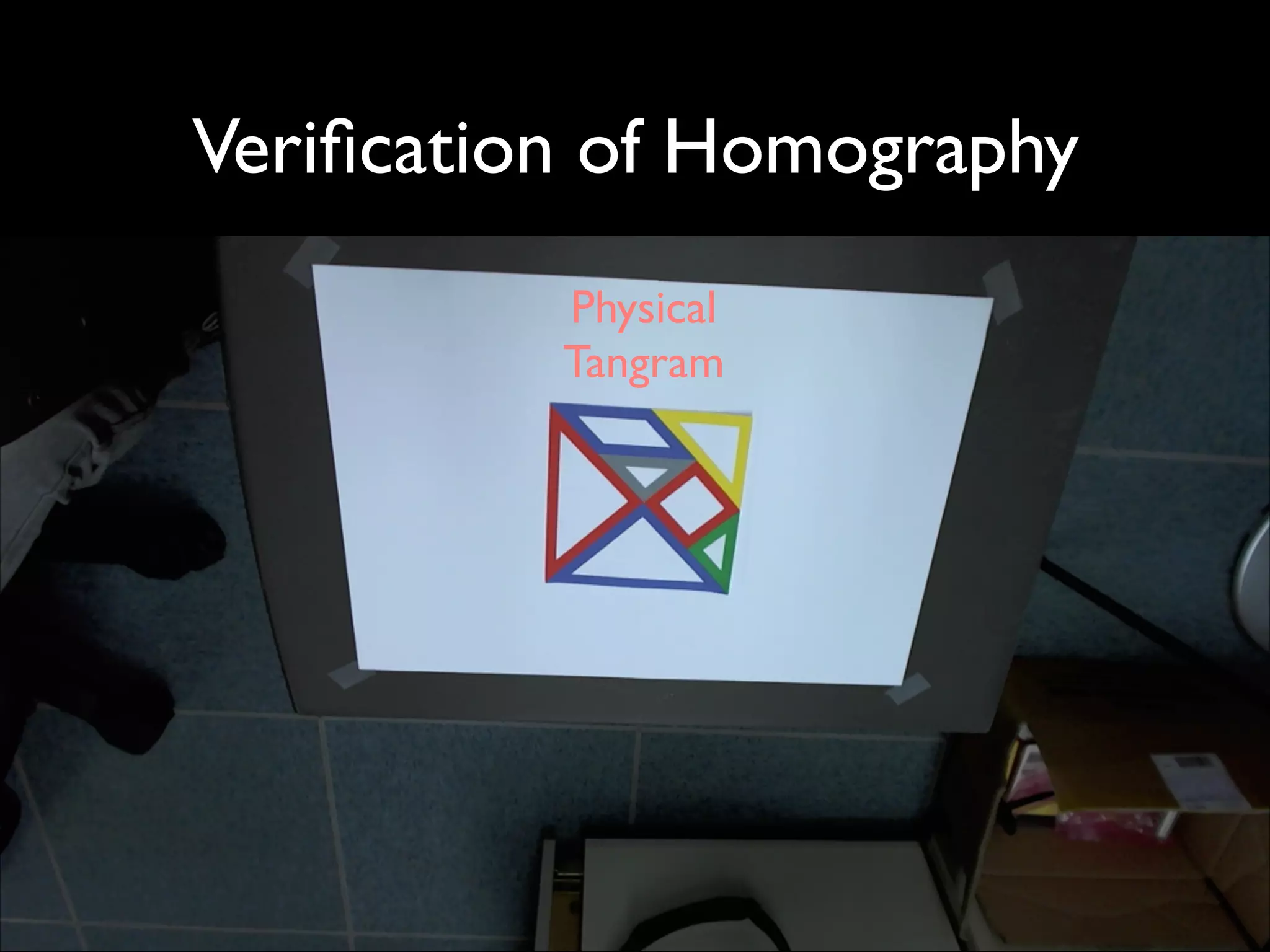
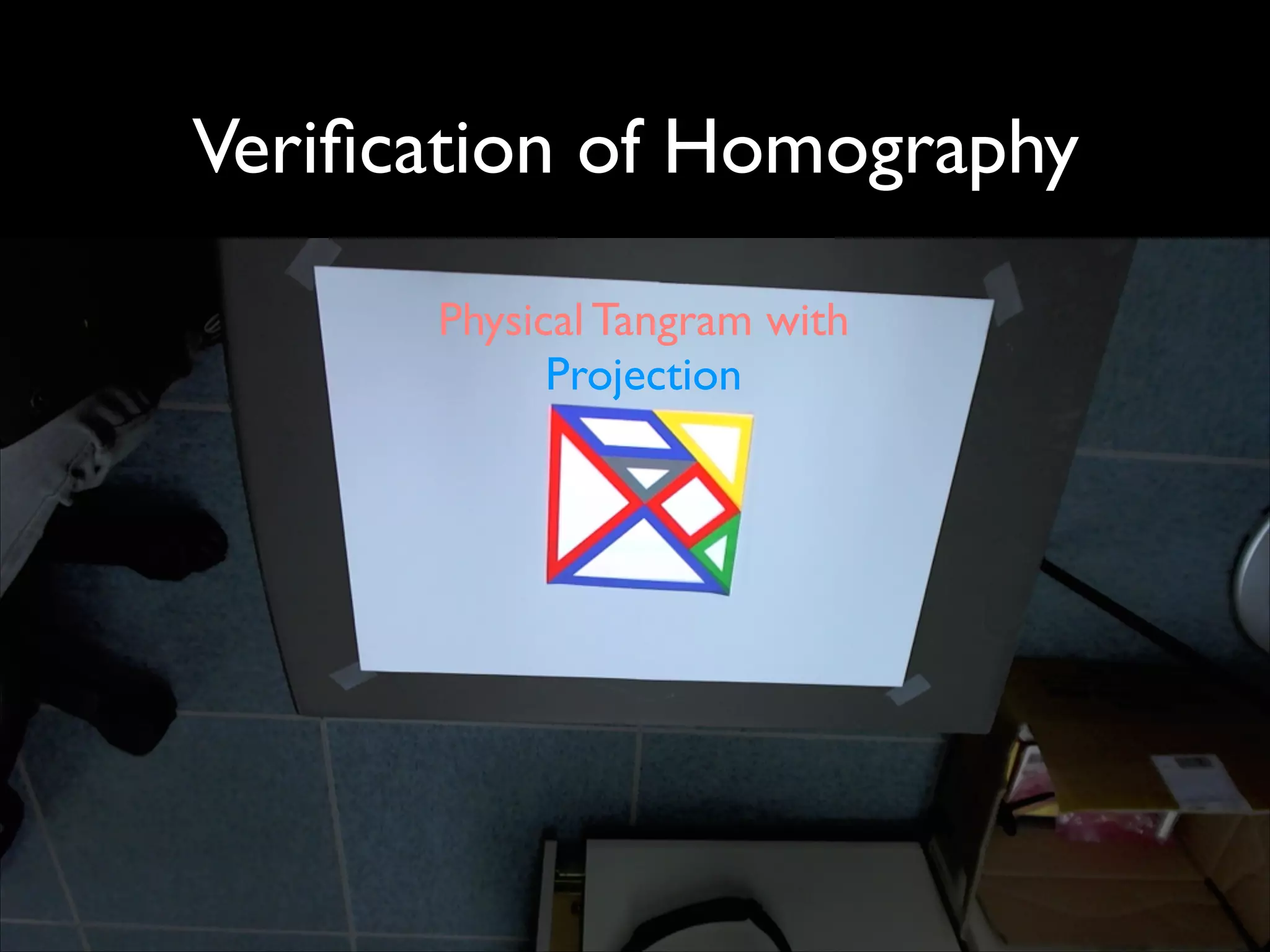
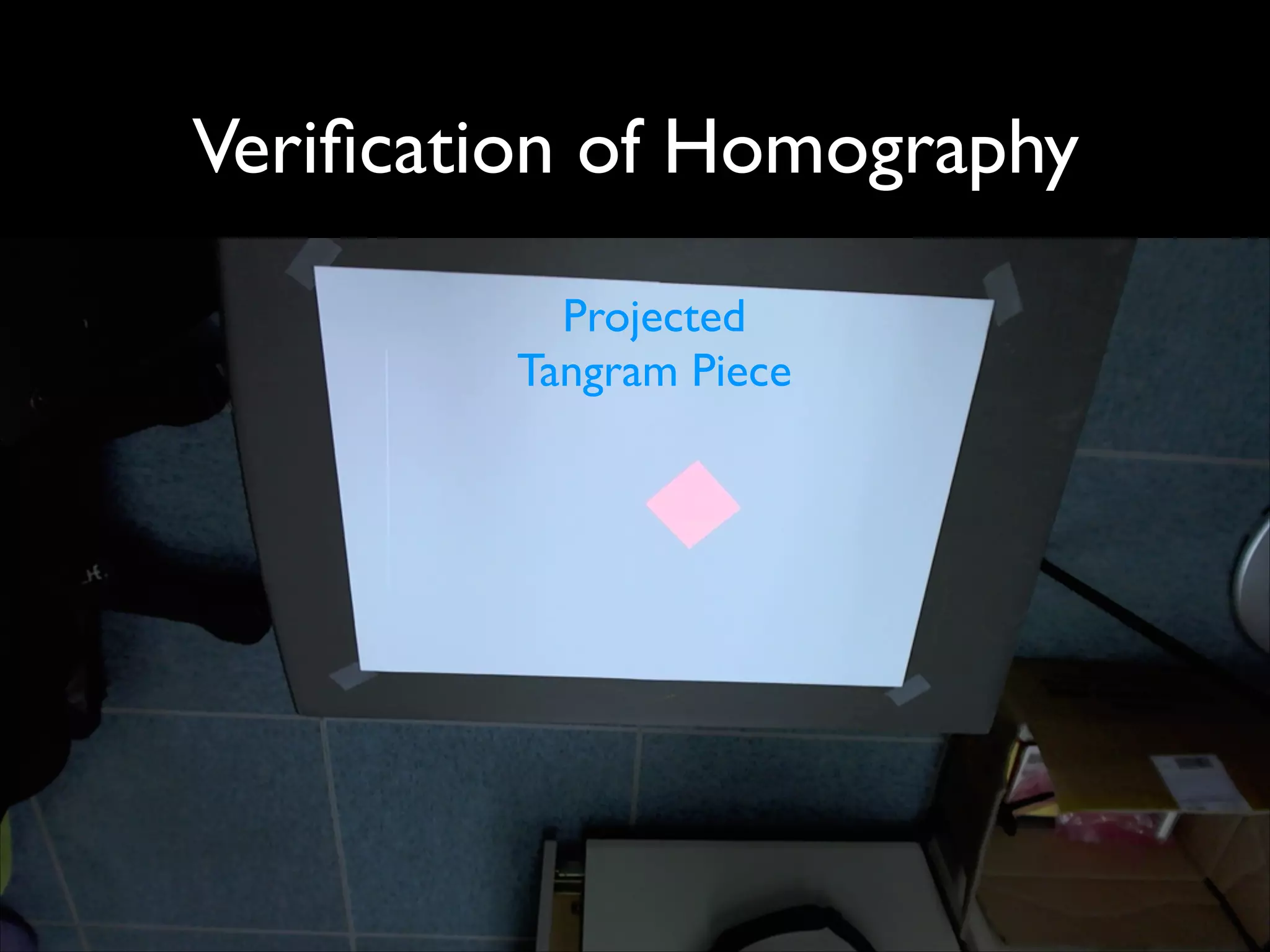
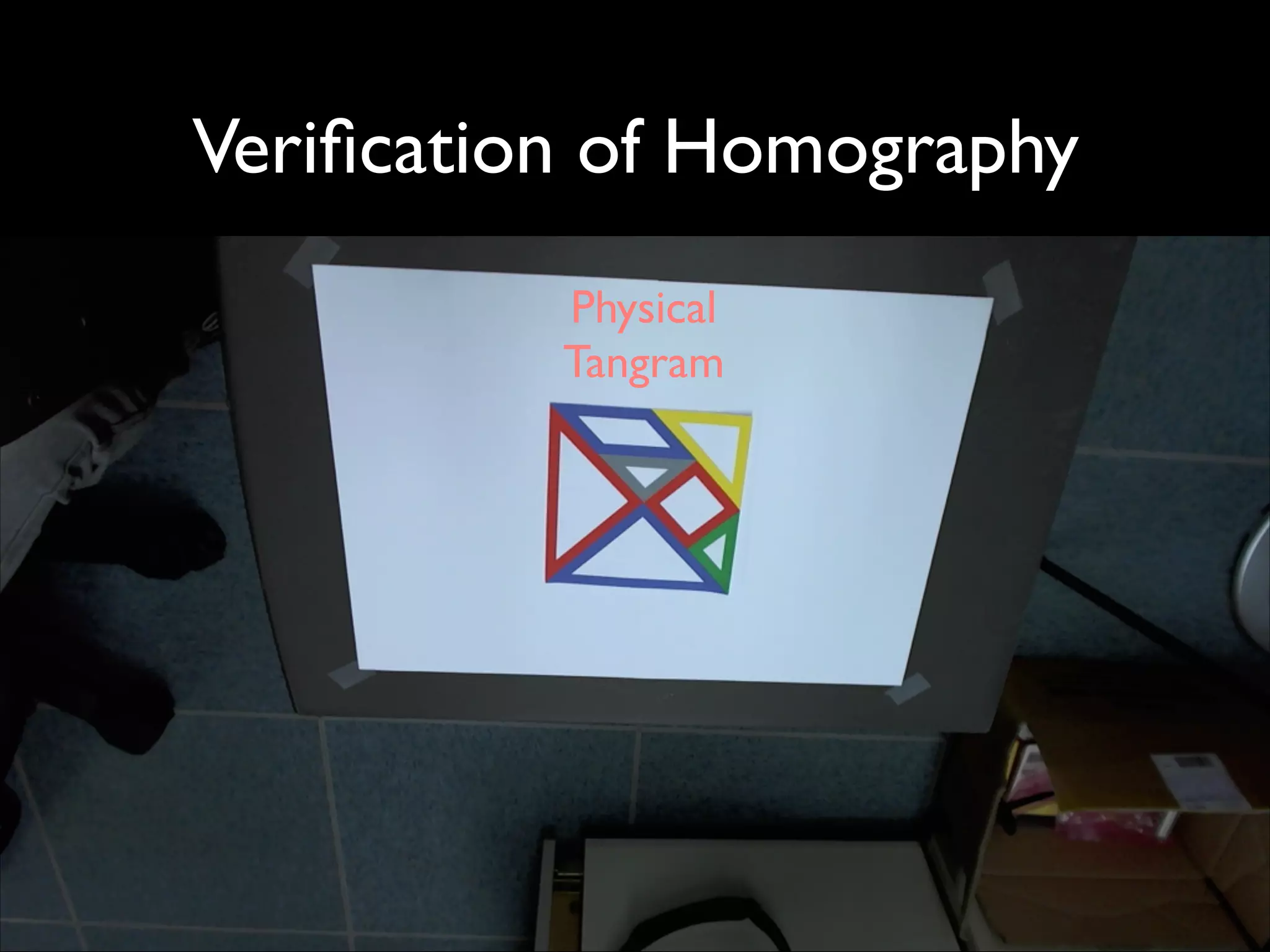
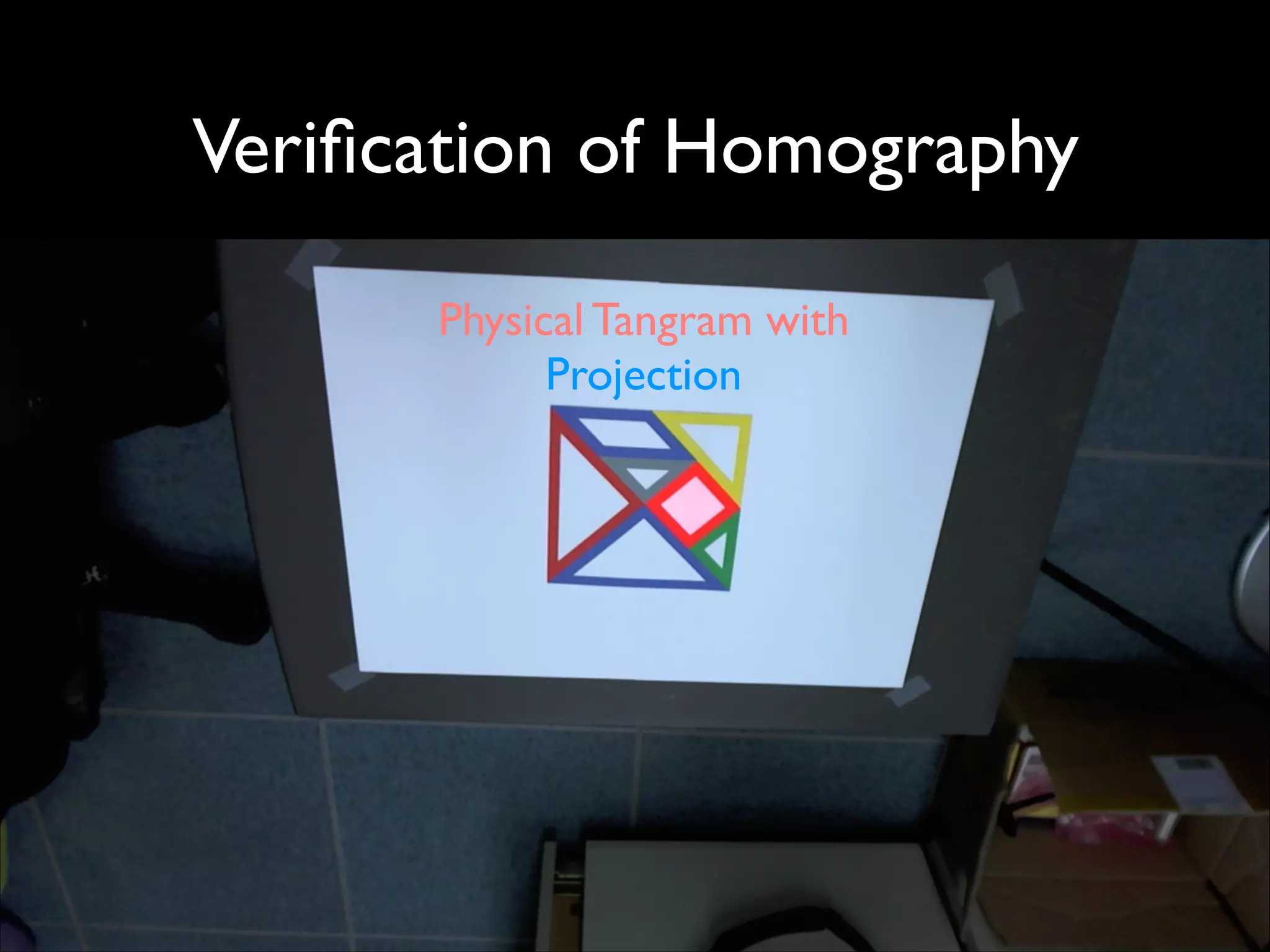
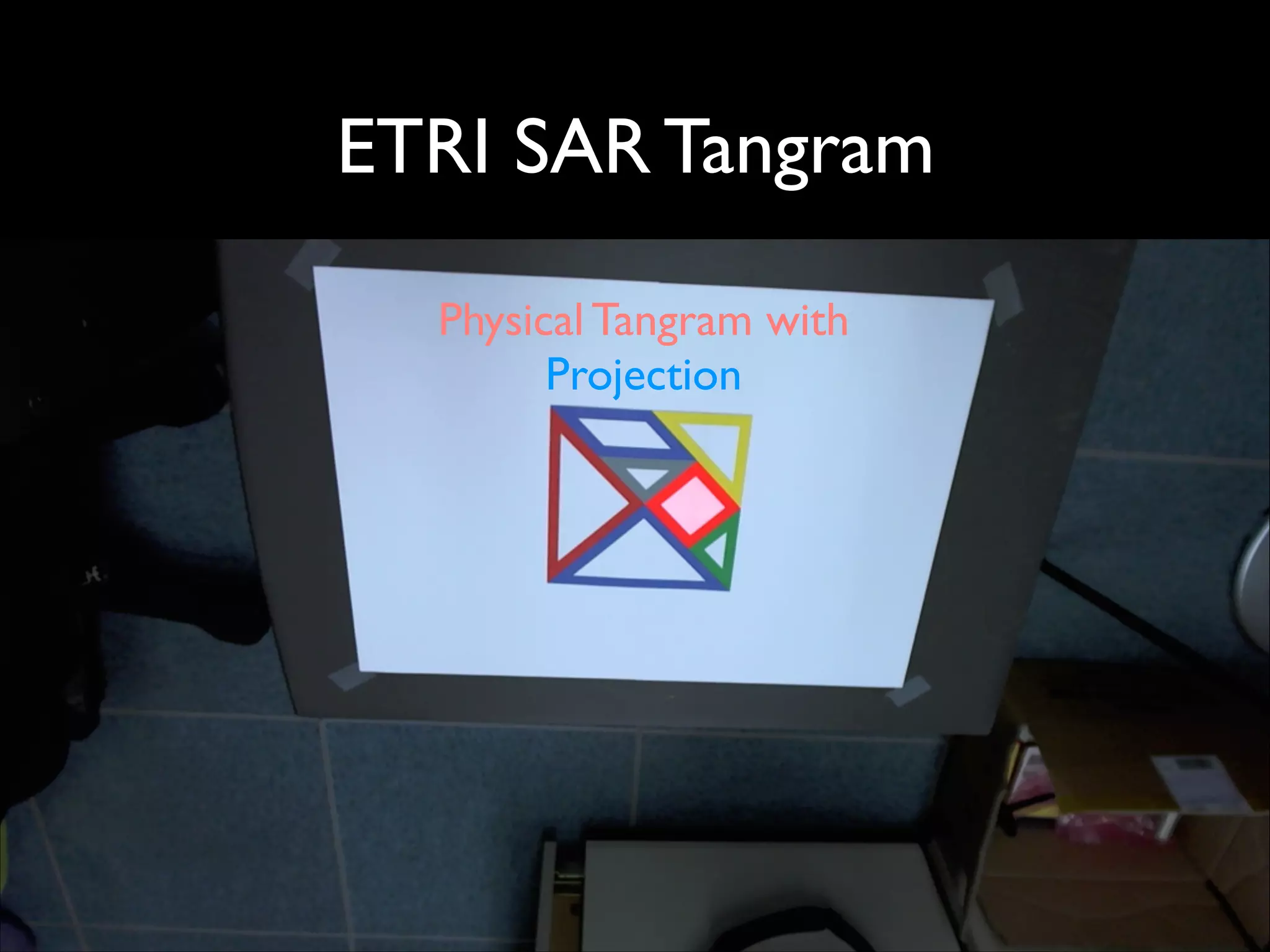
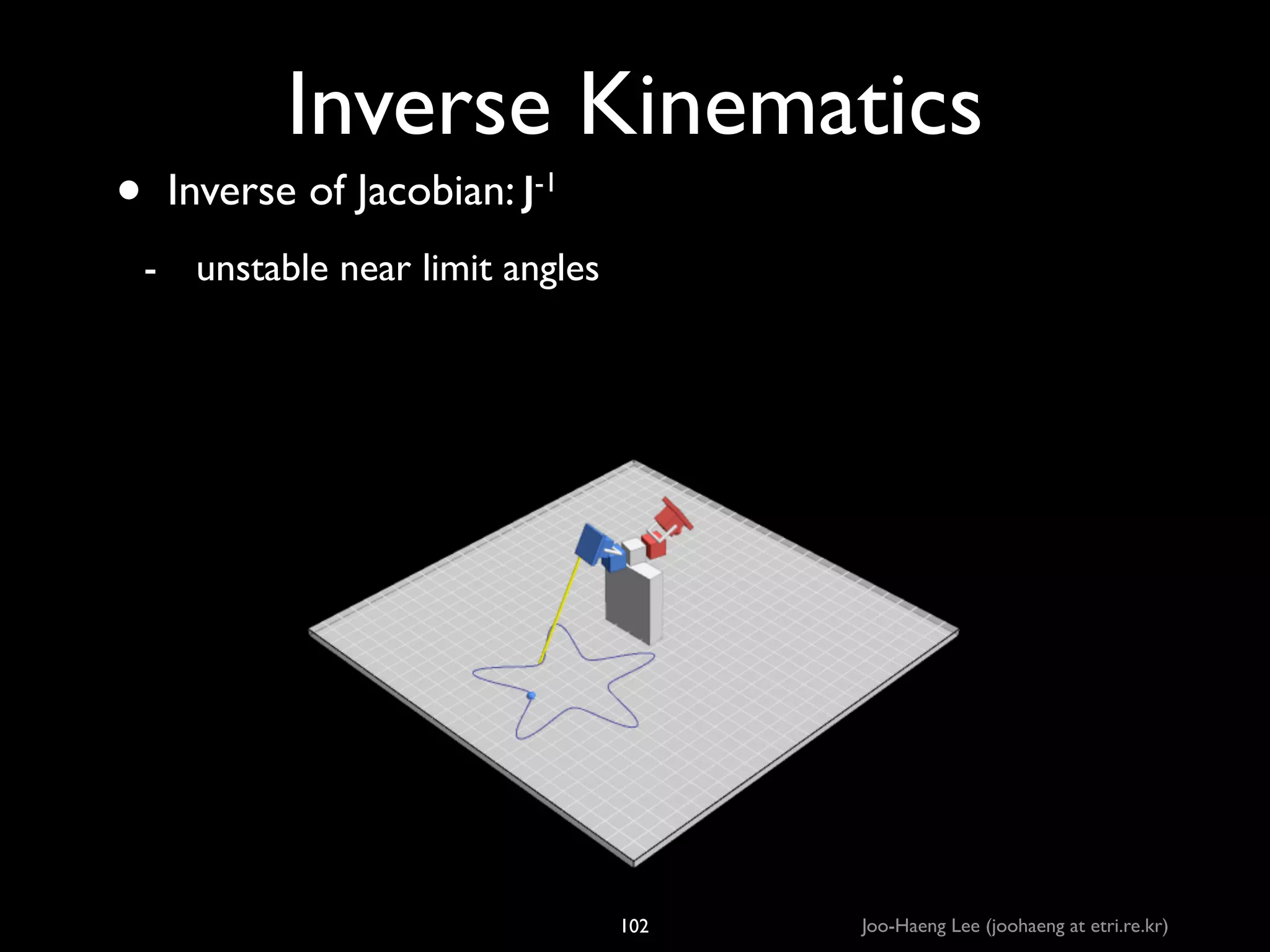
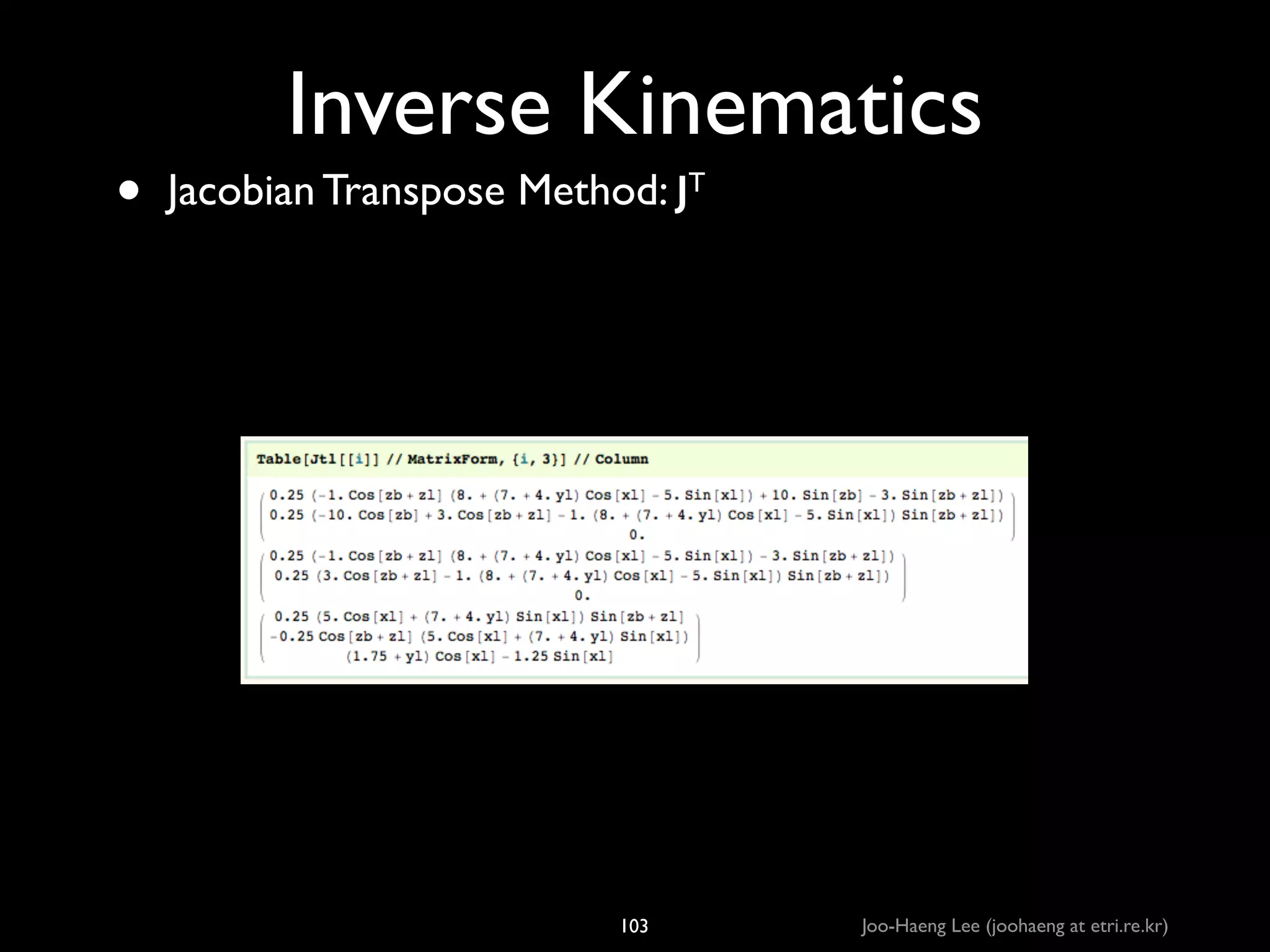
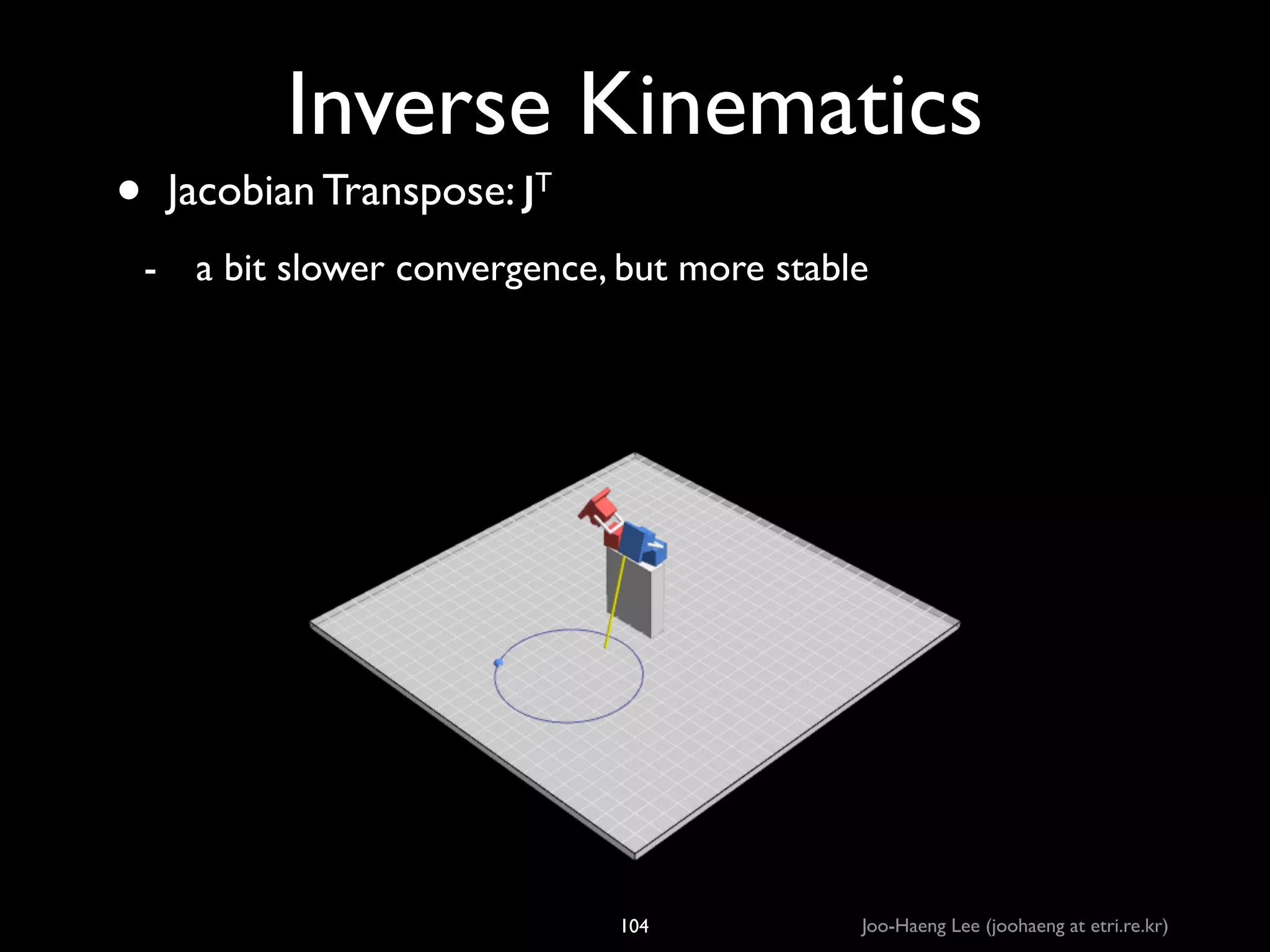
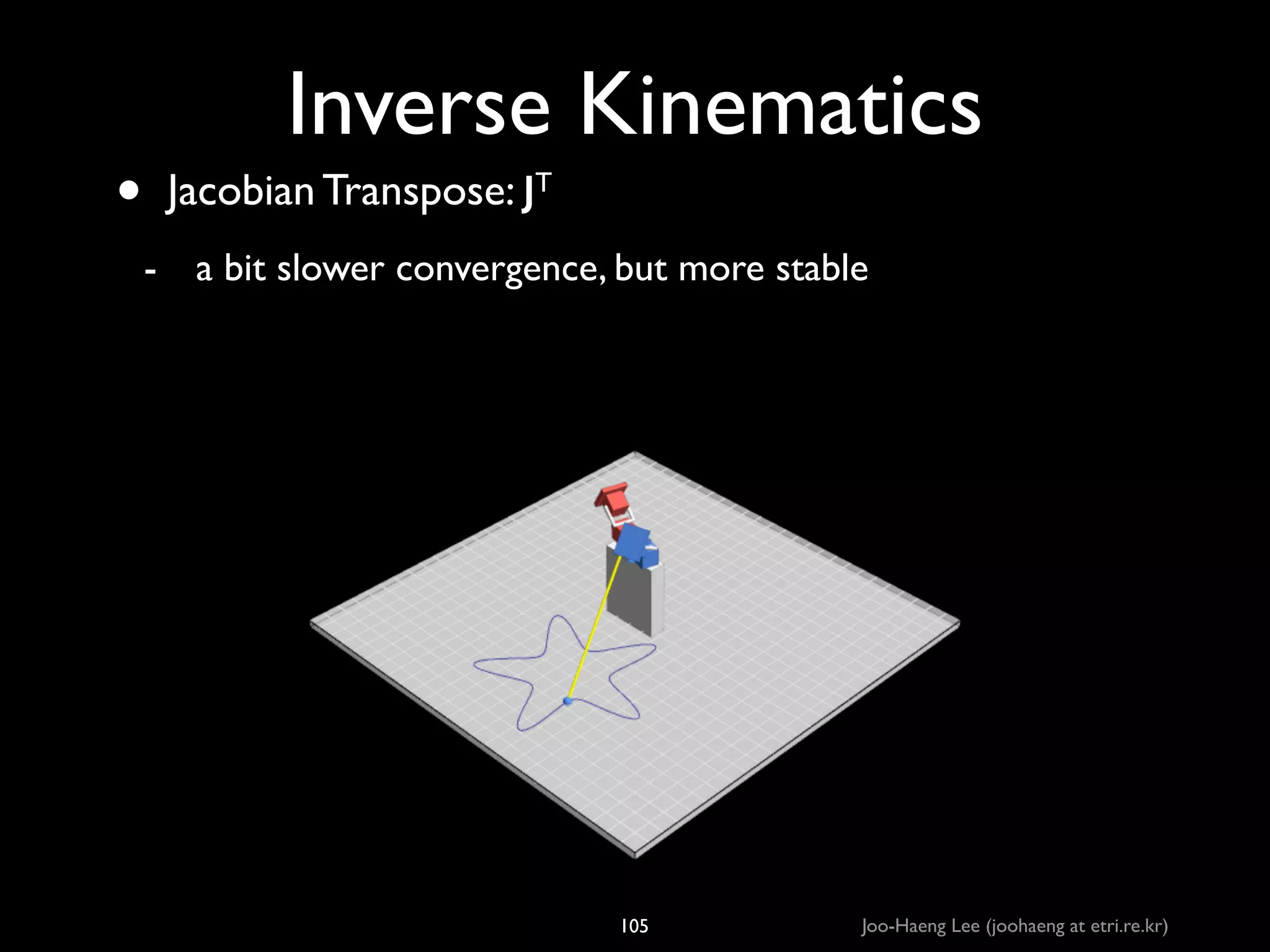
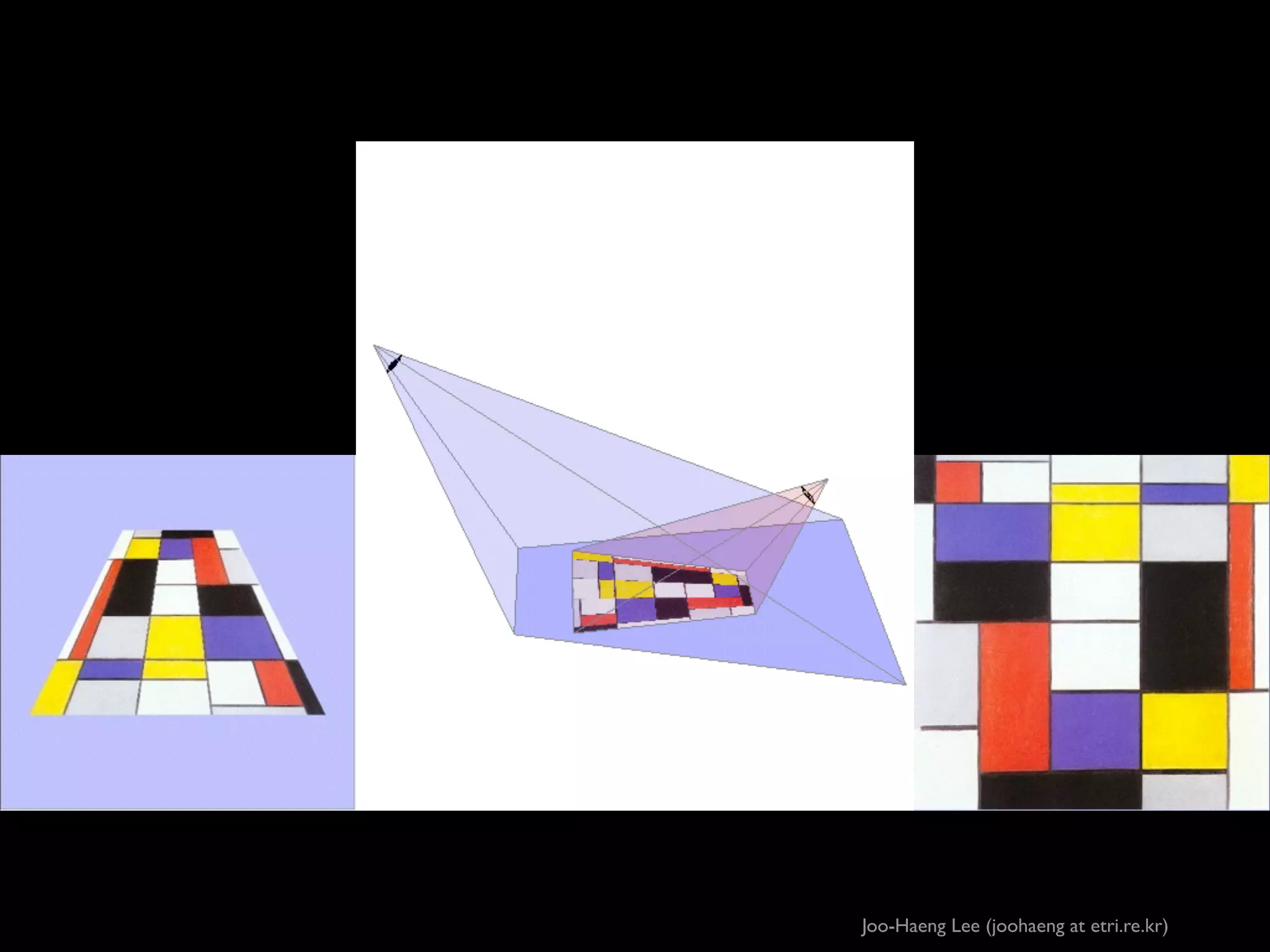
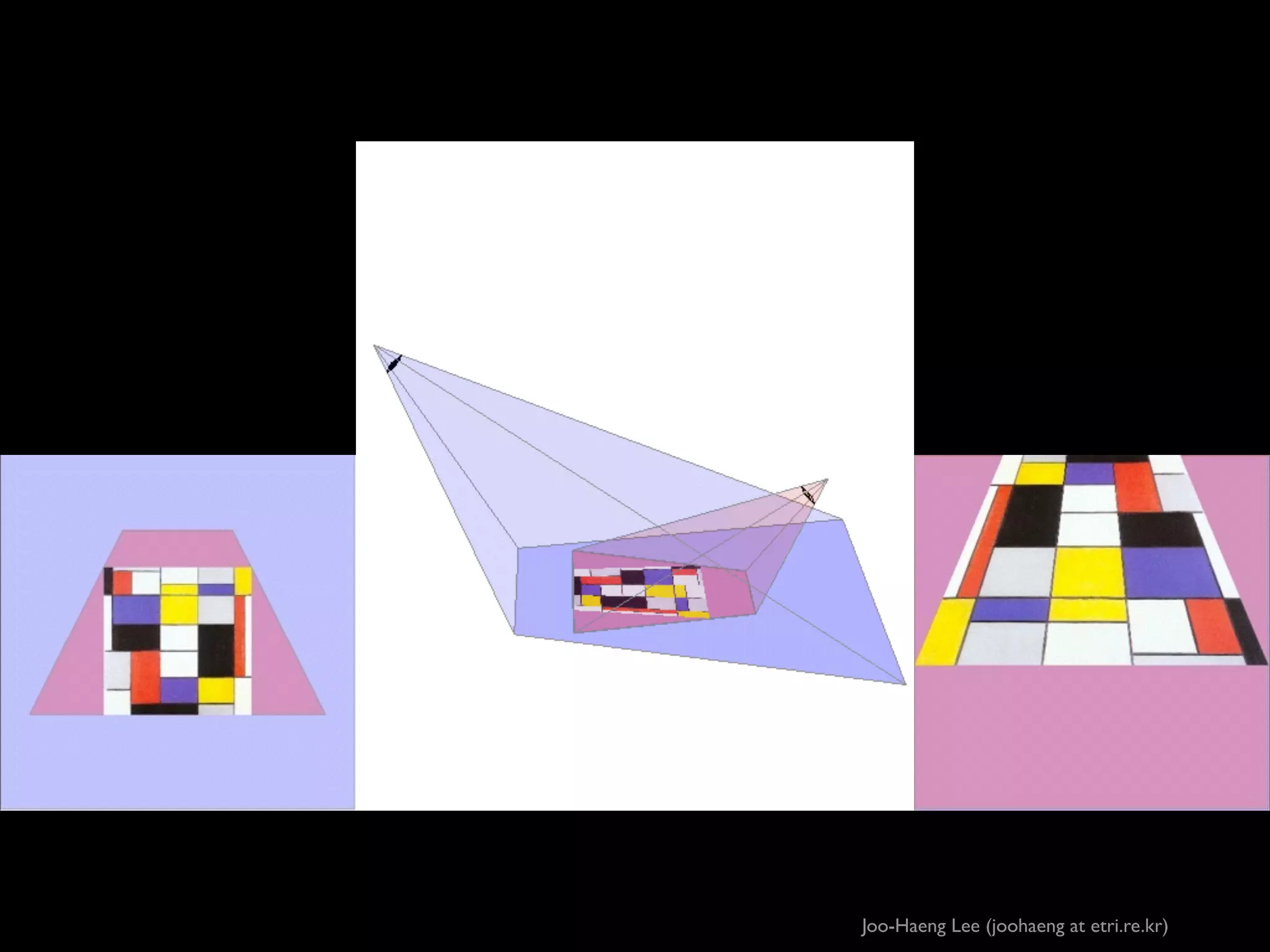
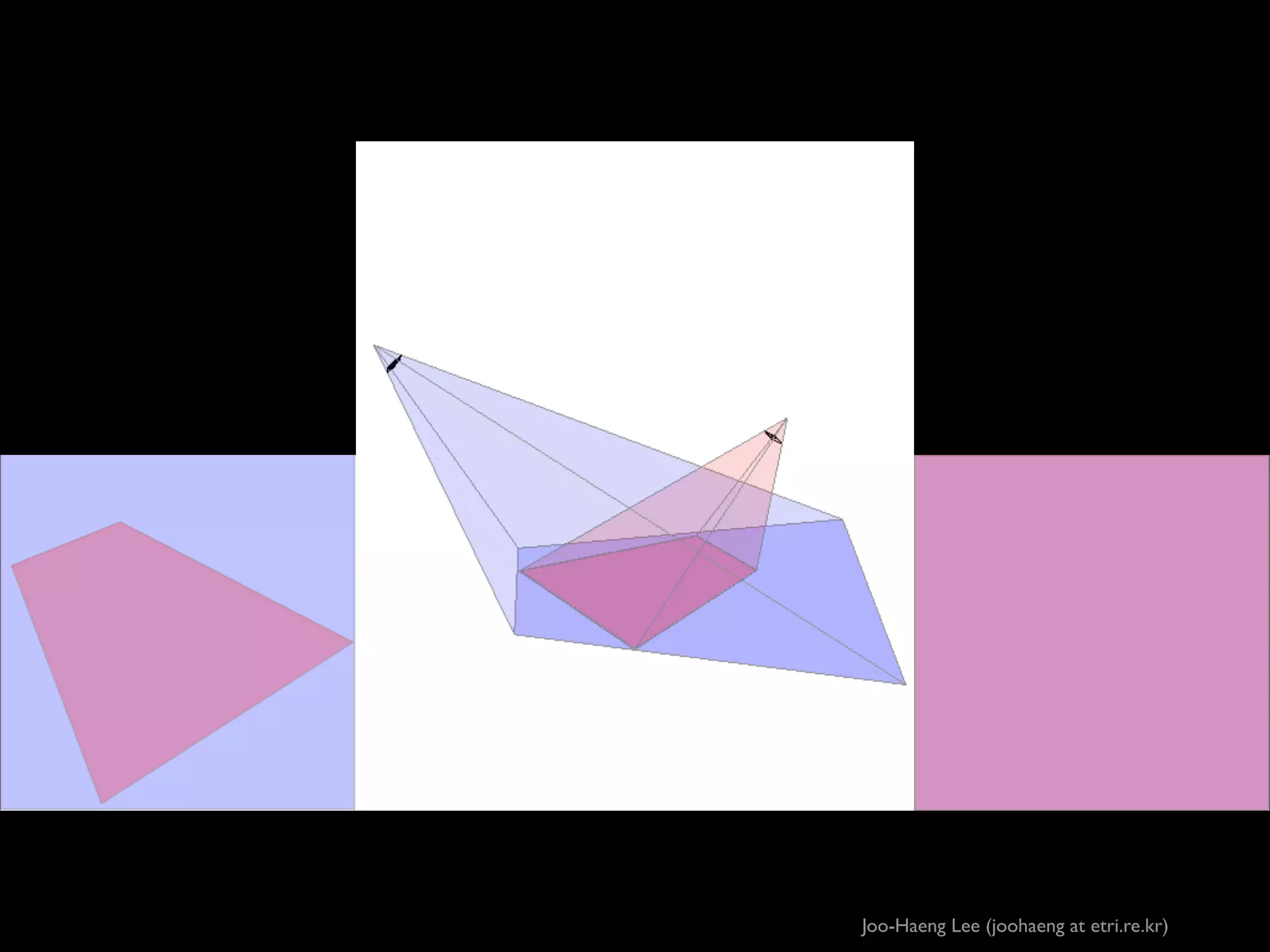
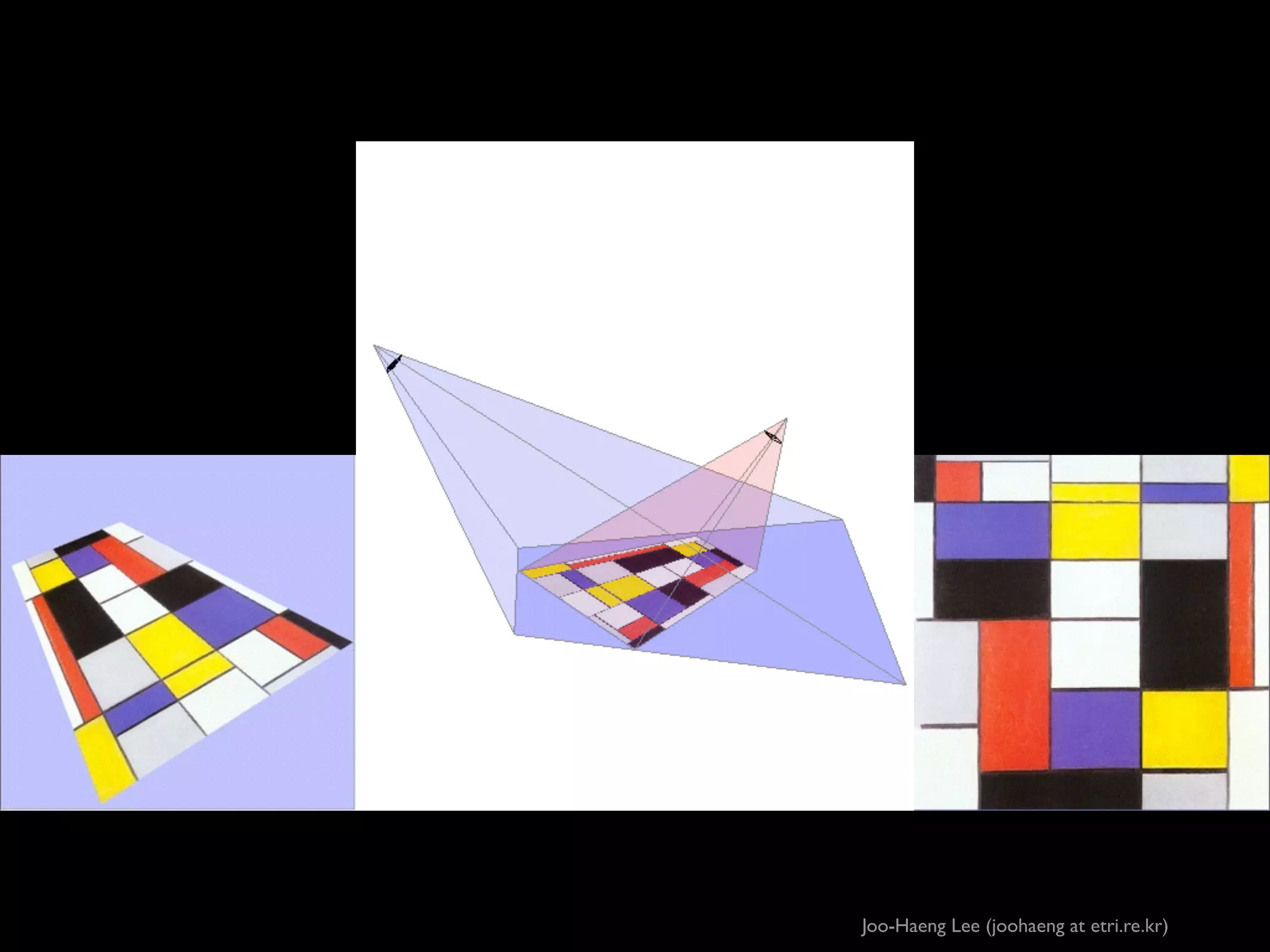
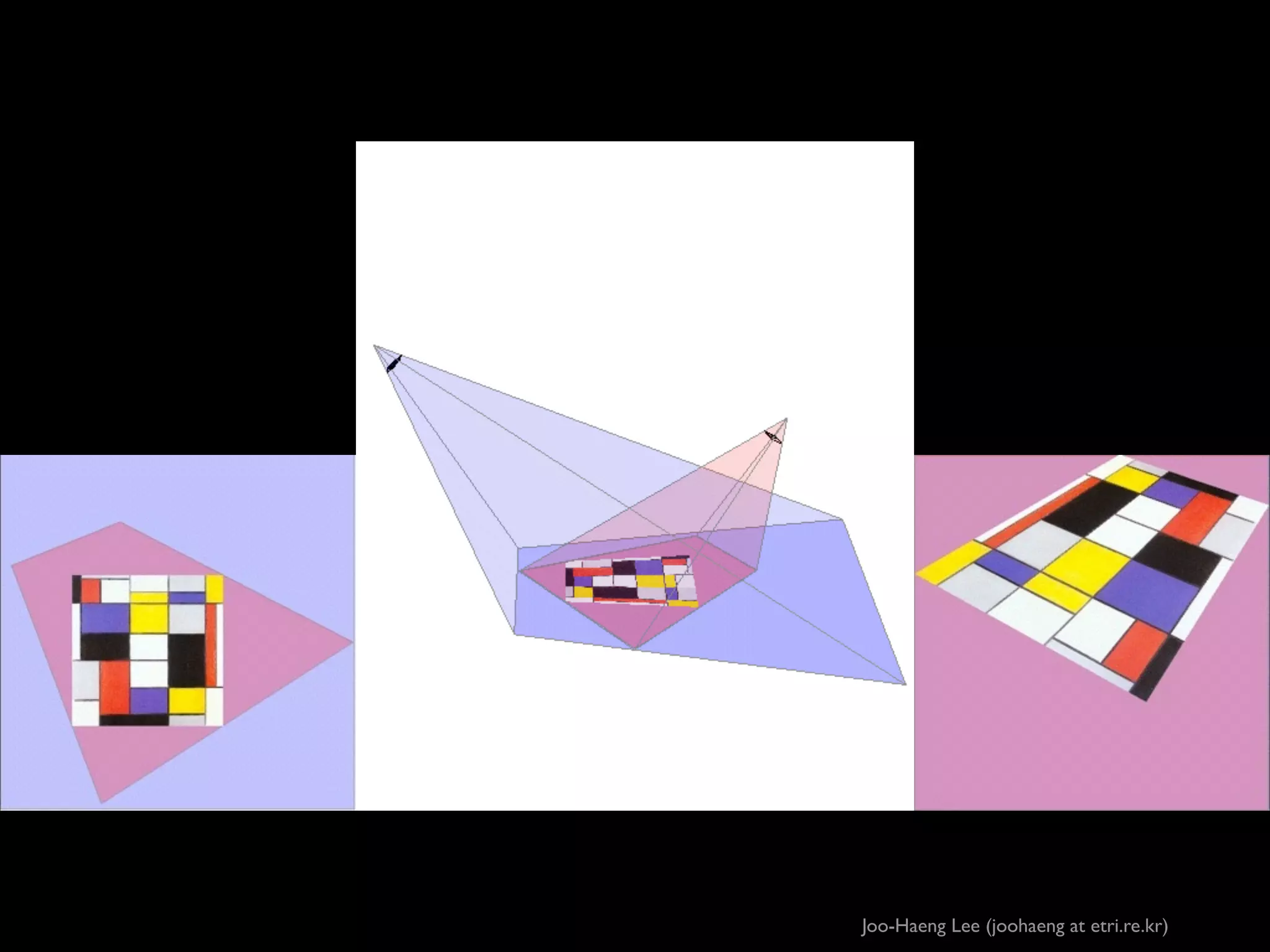
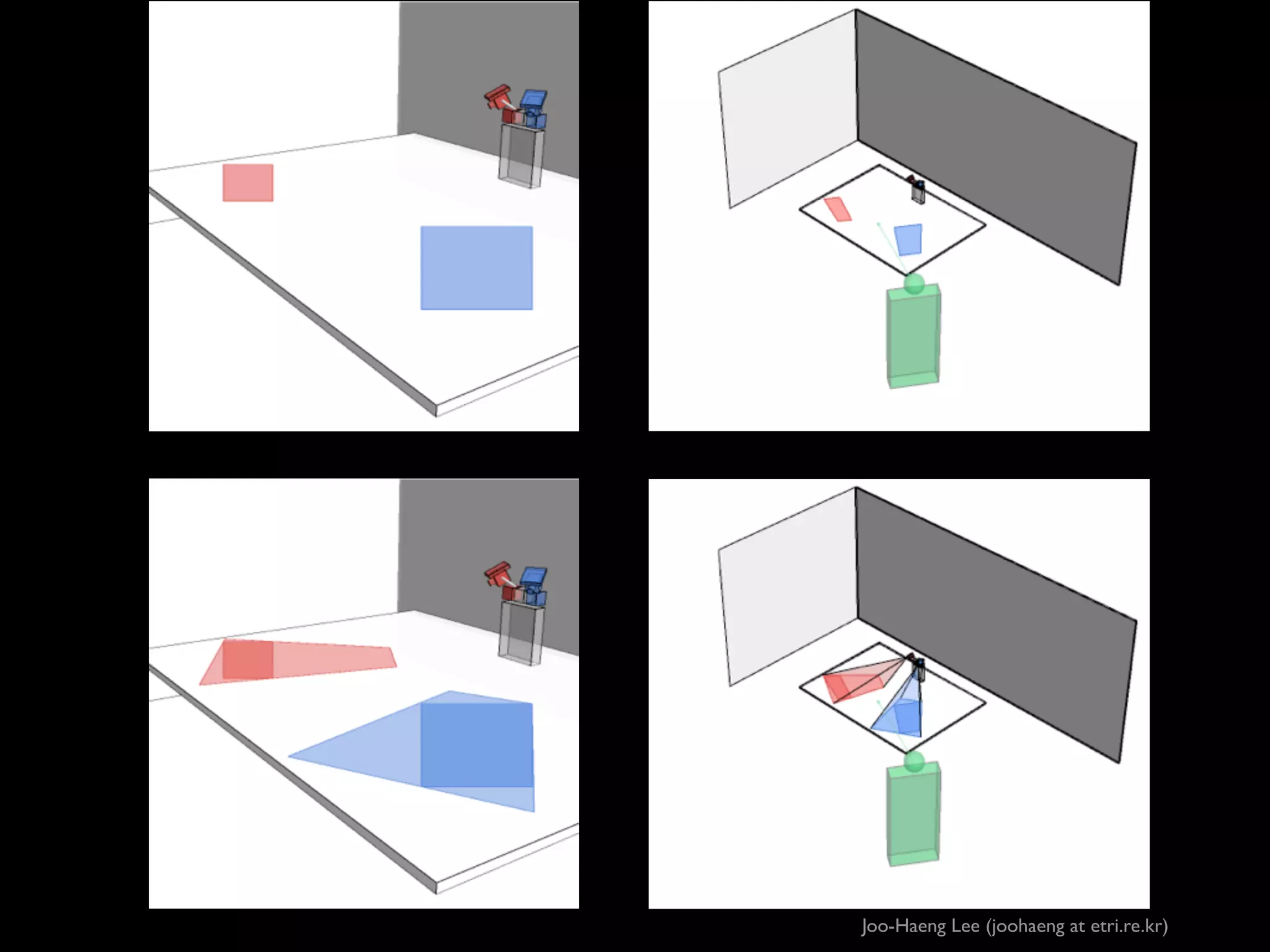
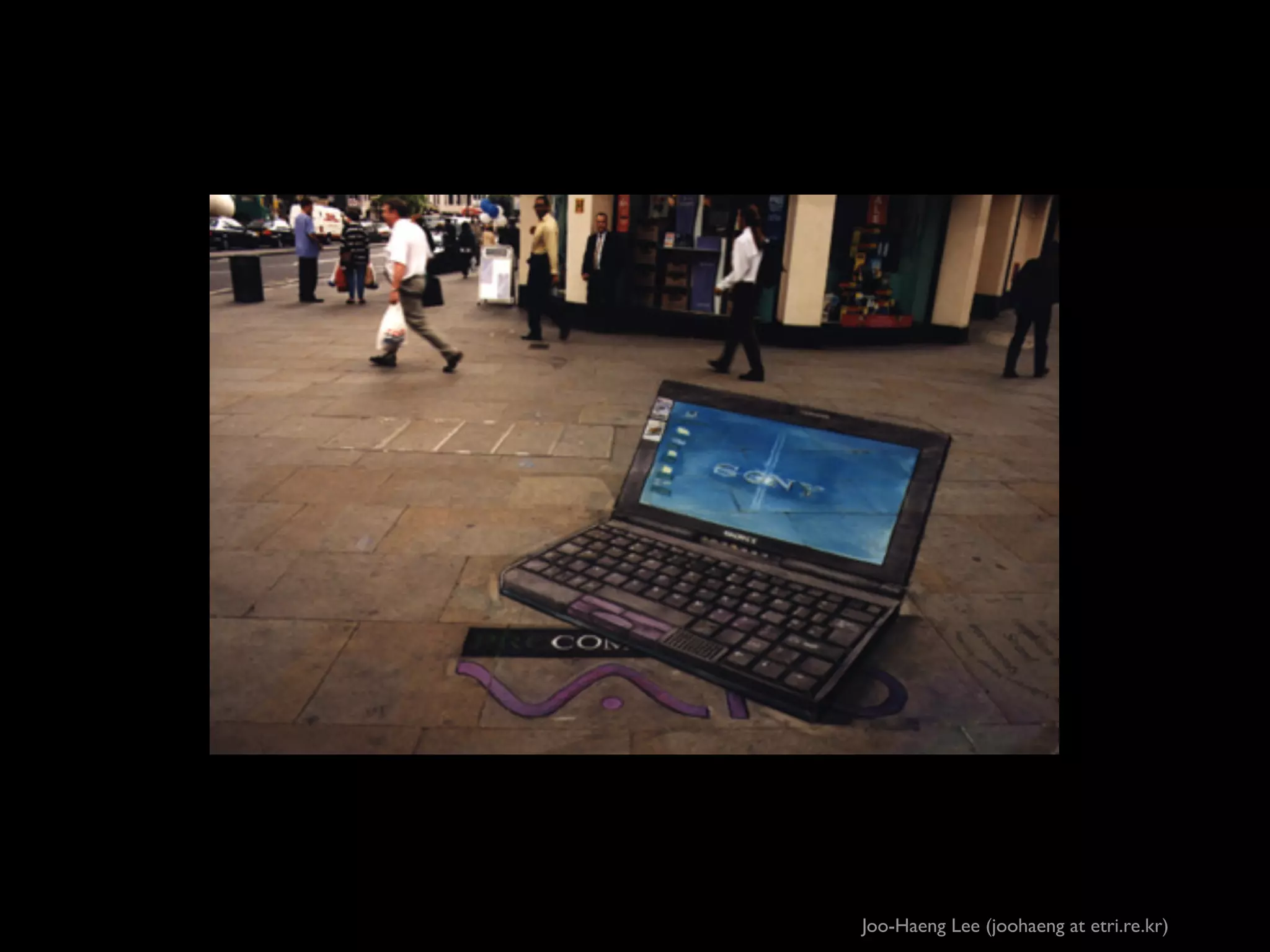

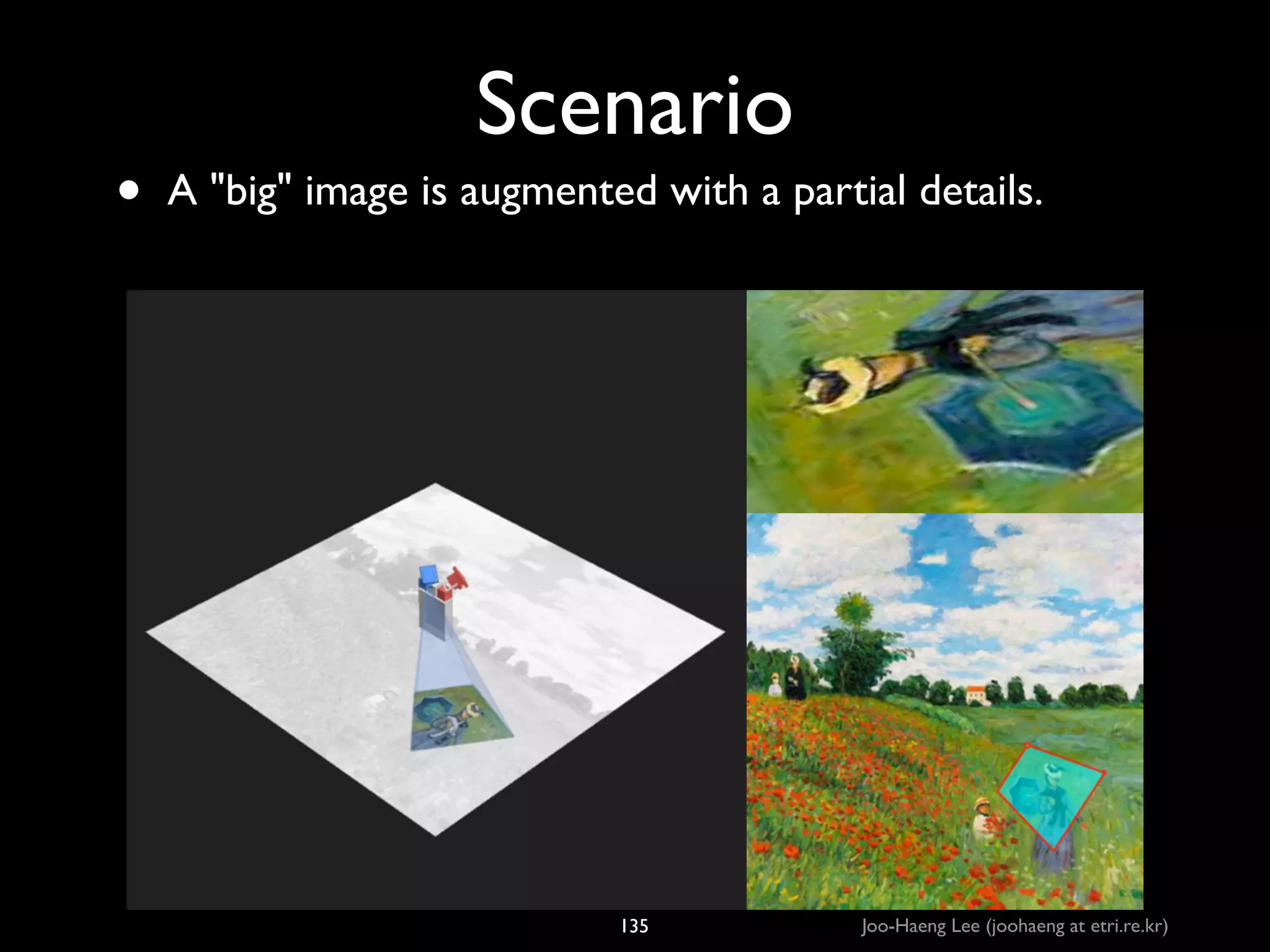

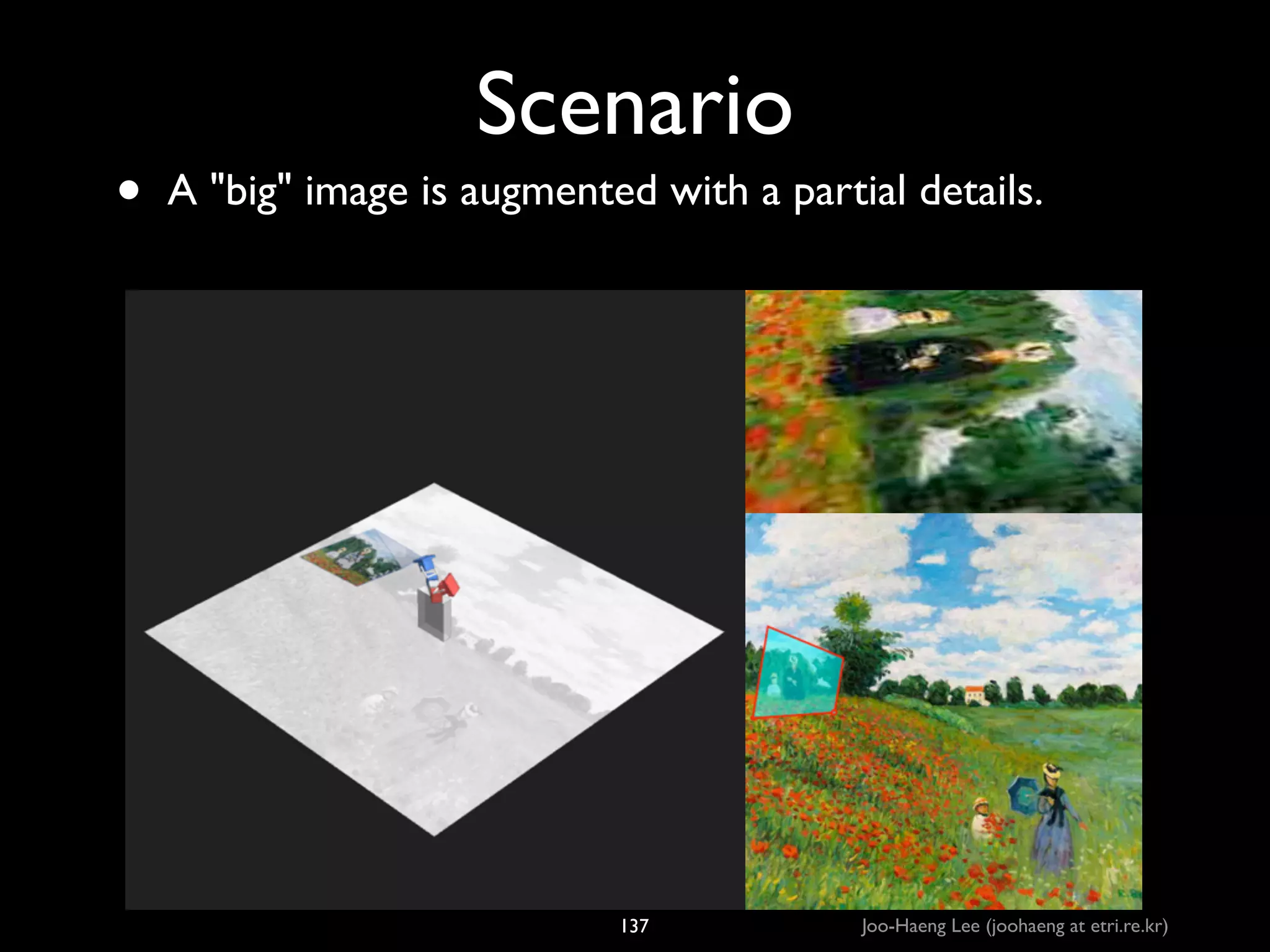
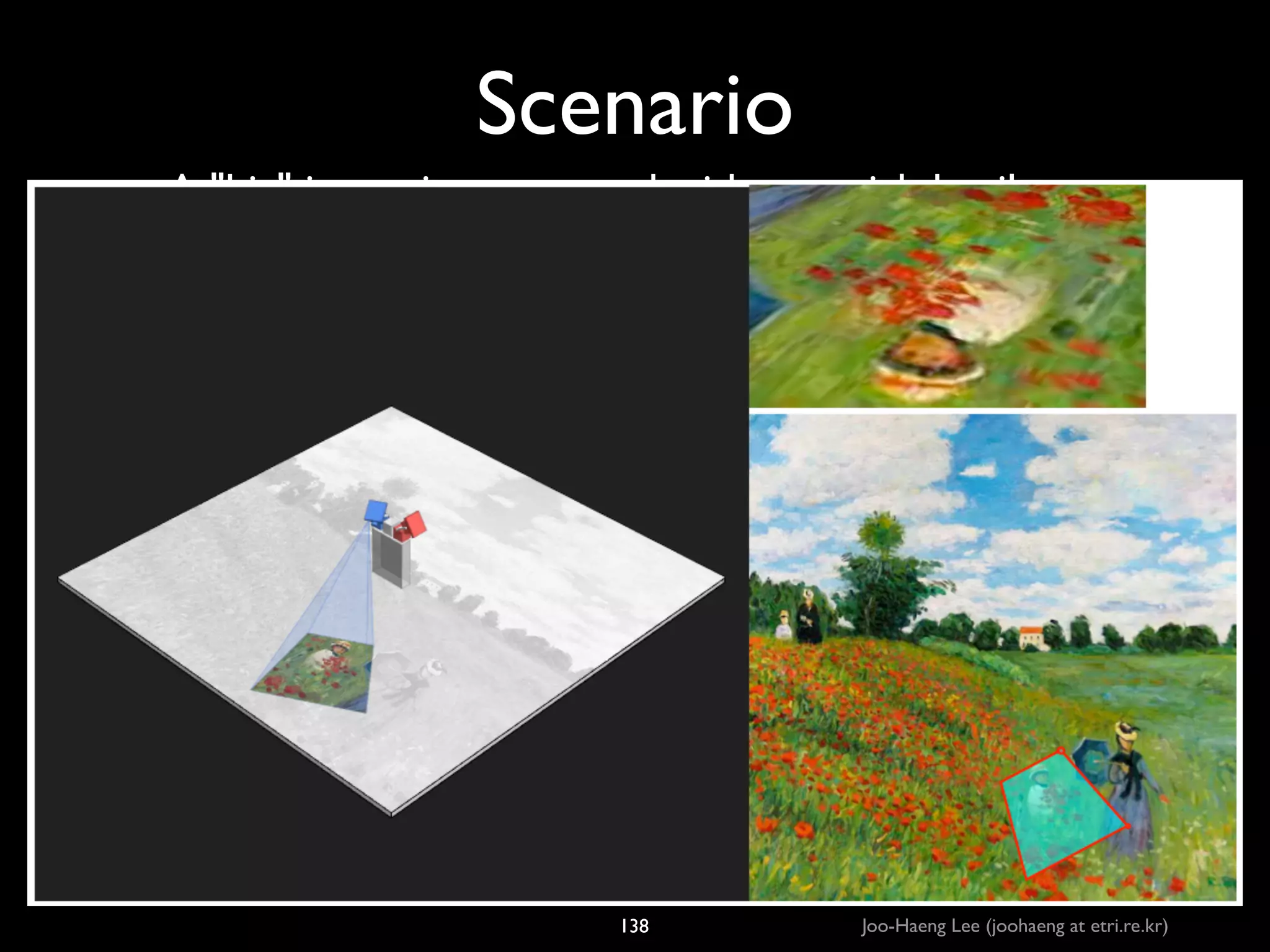
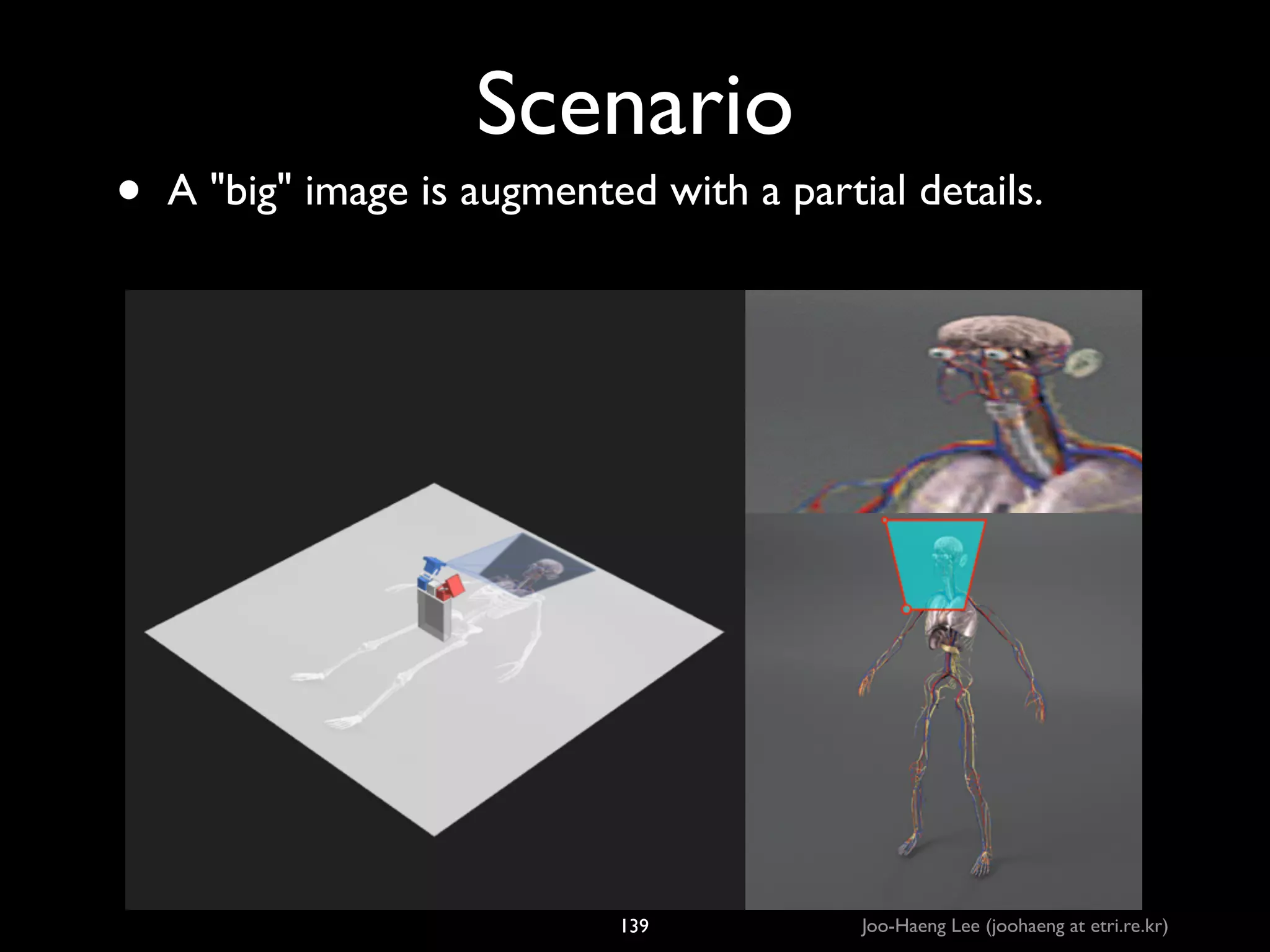
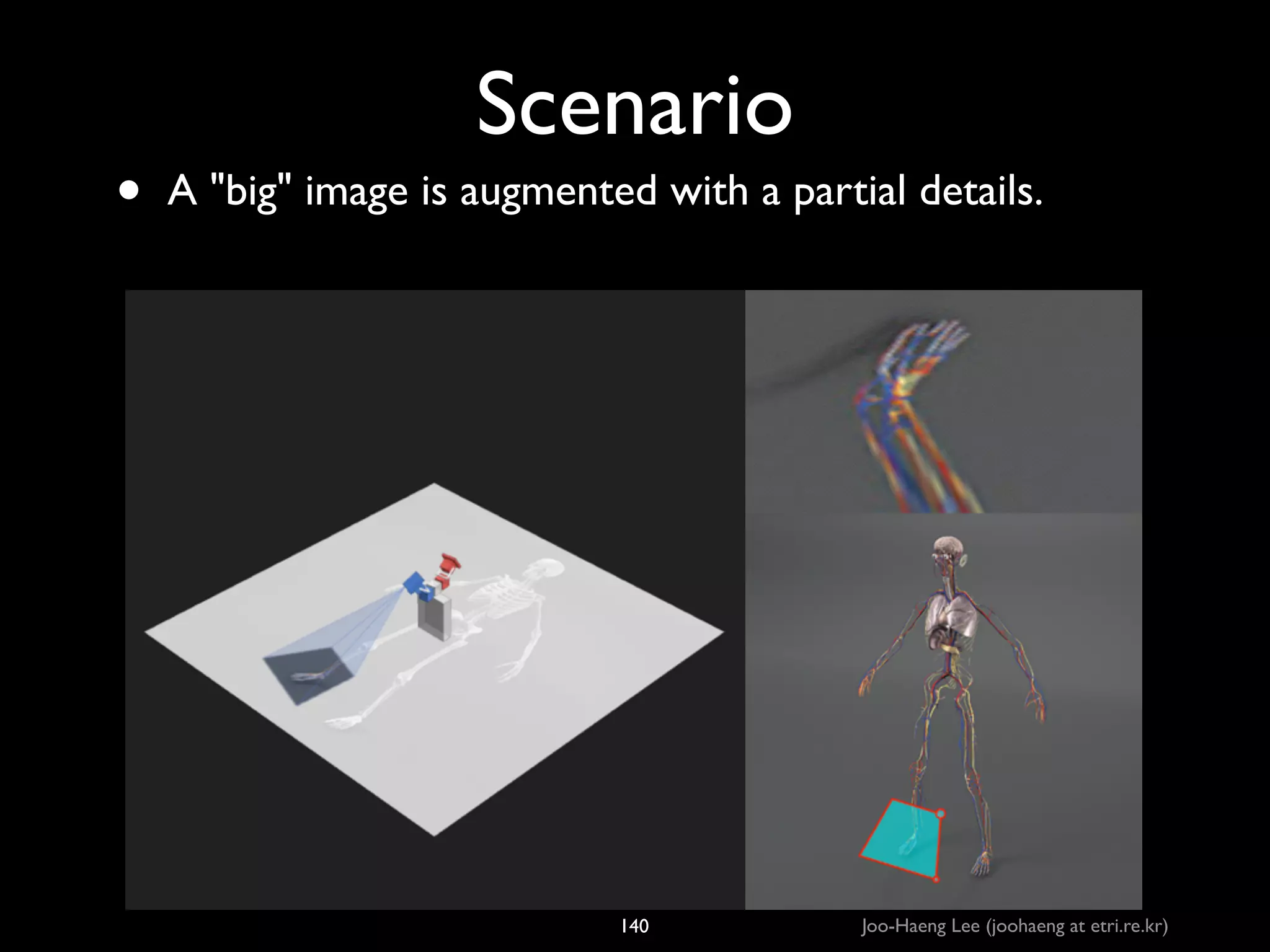
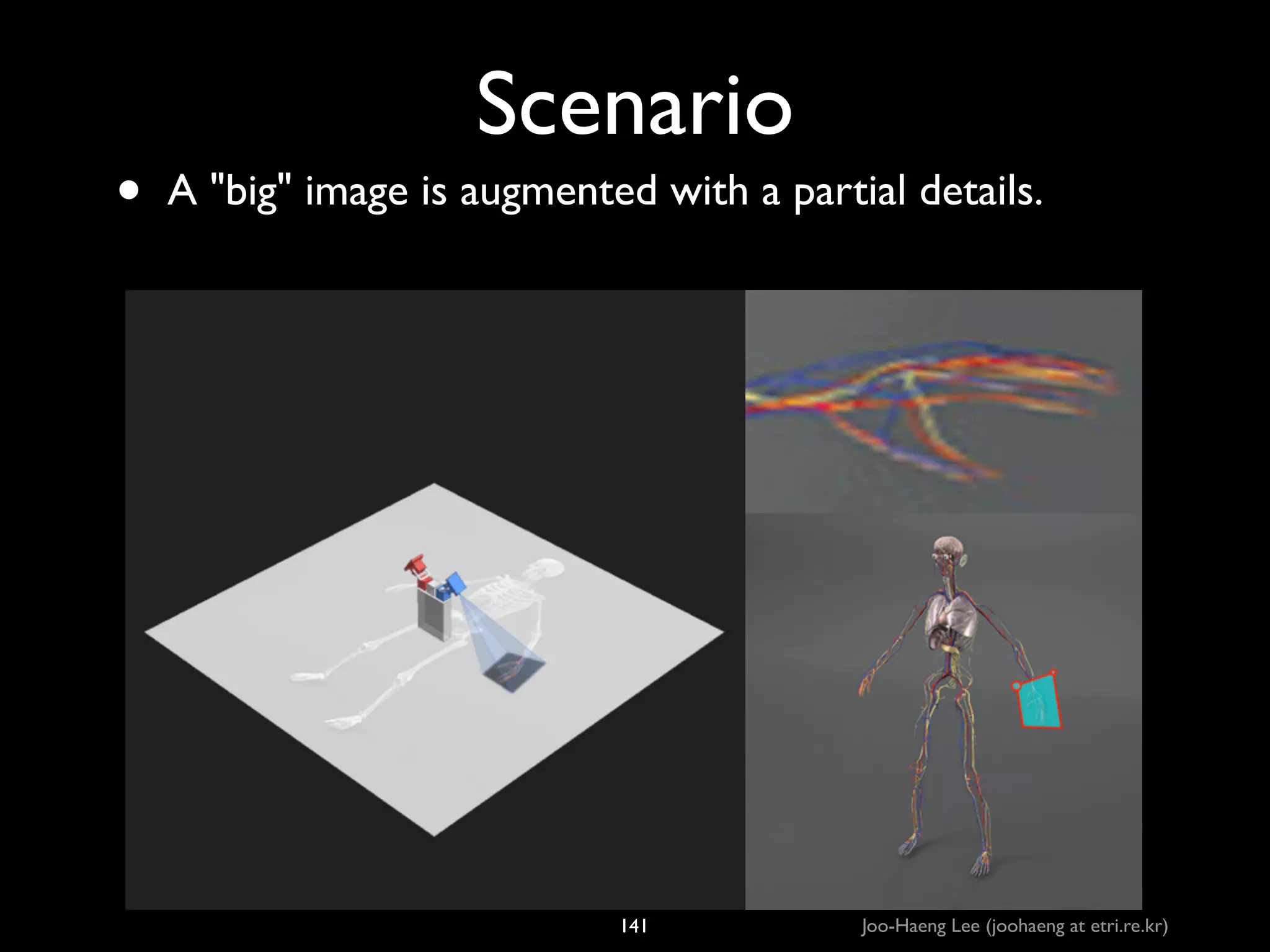
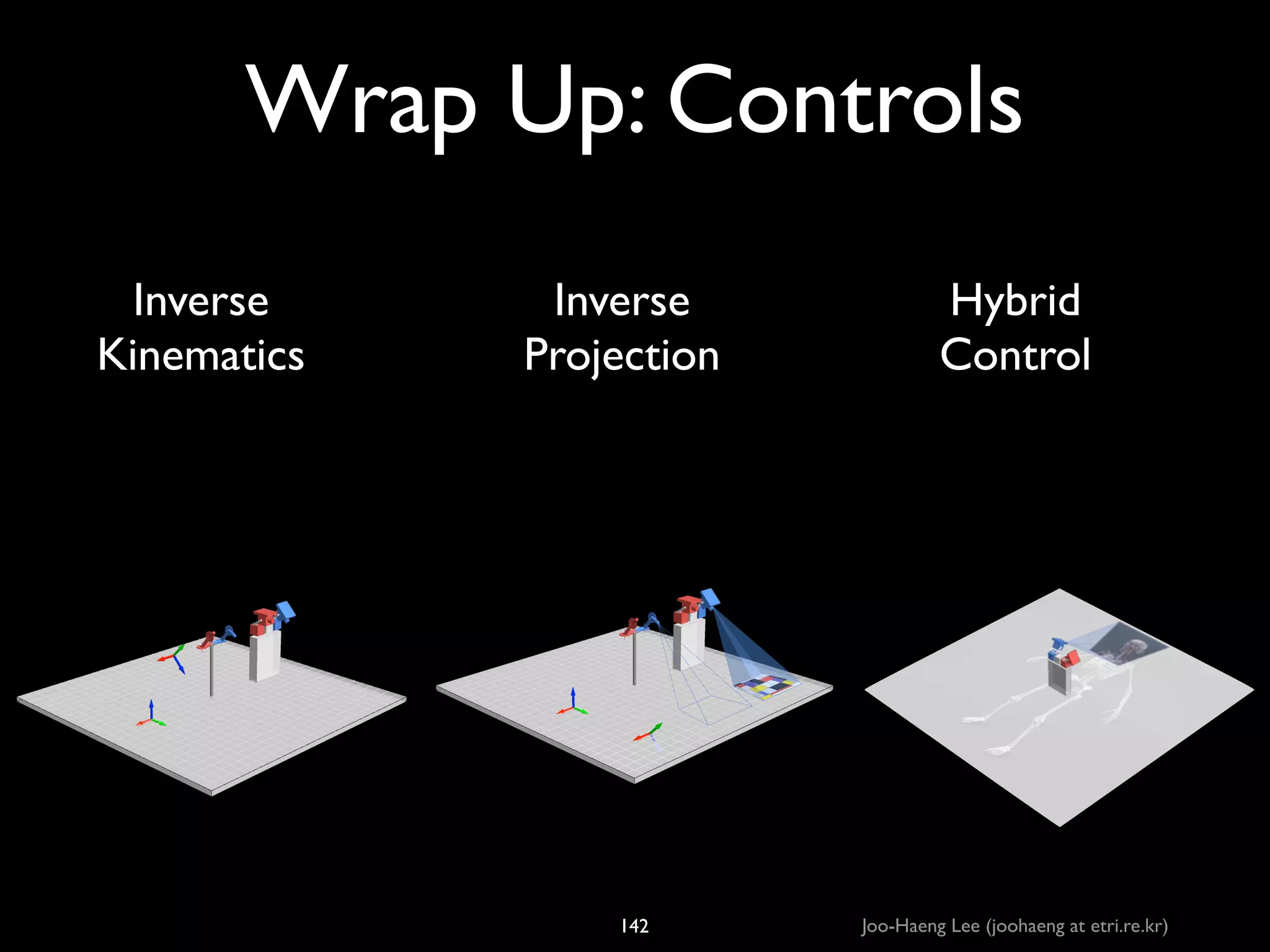


The document summarizes a presentation on user interaction techniques using projector-camera systems and their applications in spatial augmented reality (SAR) and integration with robotics. It begins with an overview of SAR and robotic SAR (RSAR), then provides examples of various SAR and RSAR systems from previous research. It also describes experiments conducted with the ETRI Future Robotic Computer, including RSAR tasks like path following, augmenting details, and interaction with an IR pen, as well as SAR applications like curve design, an FTIR canvas, and 3D tangram games.





























































