Downloaded 55 times
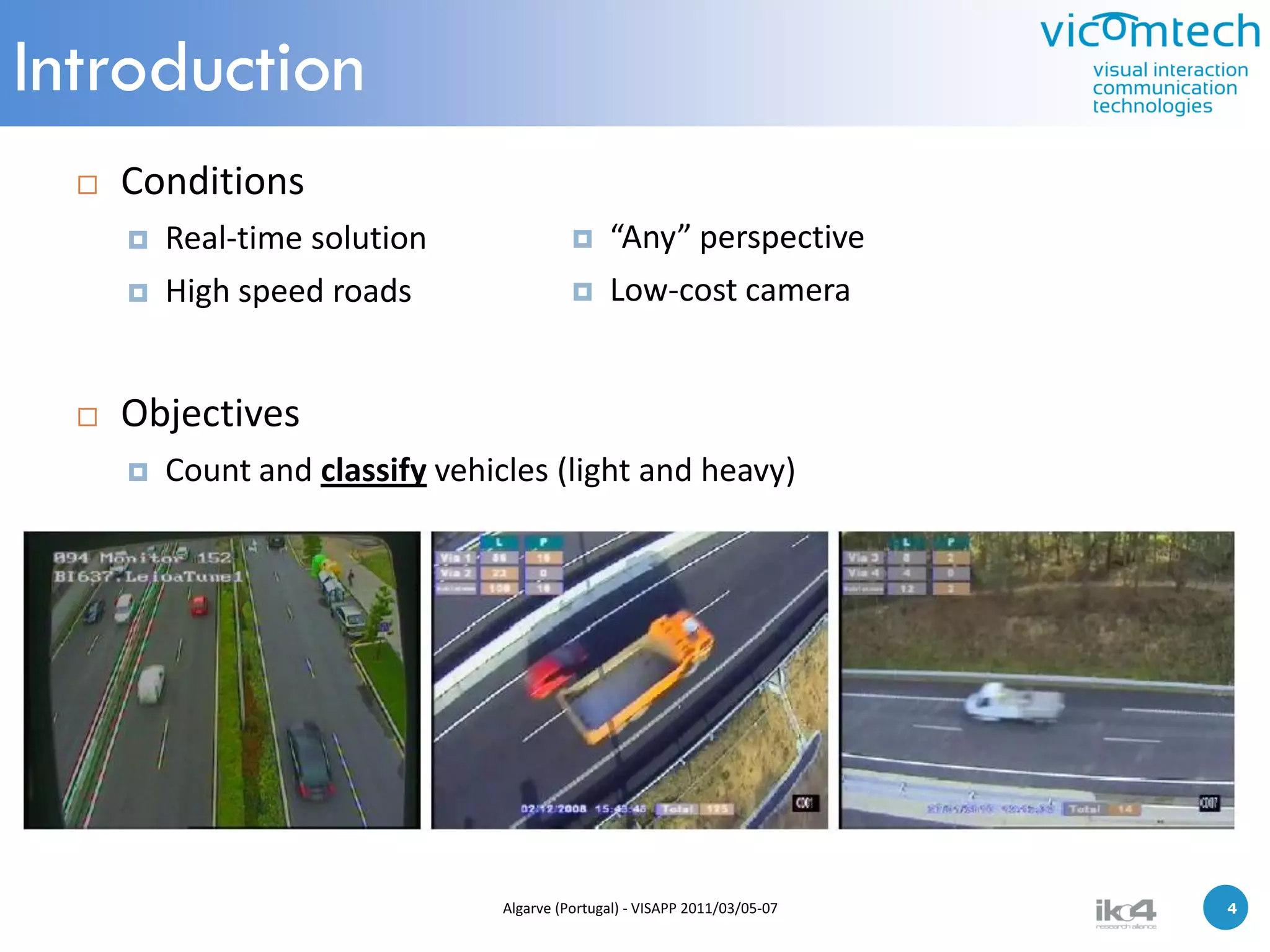
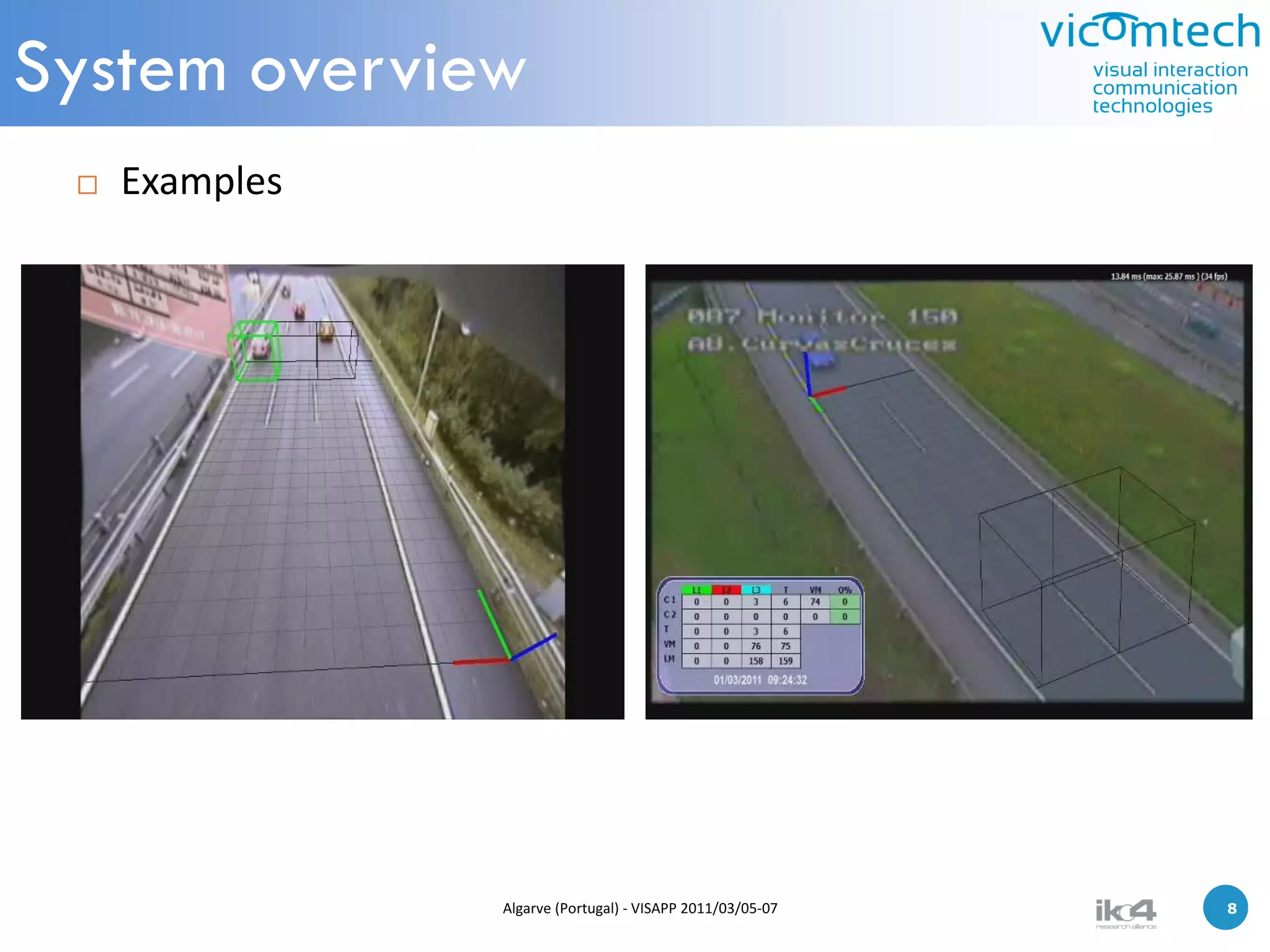
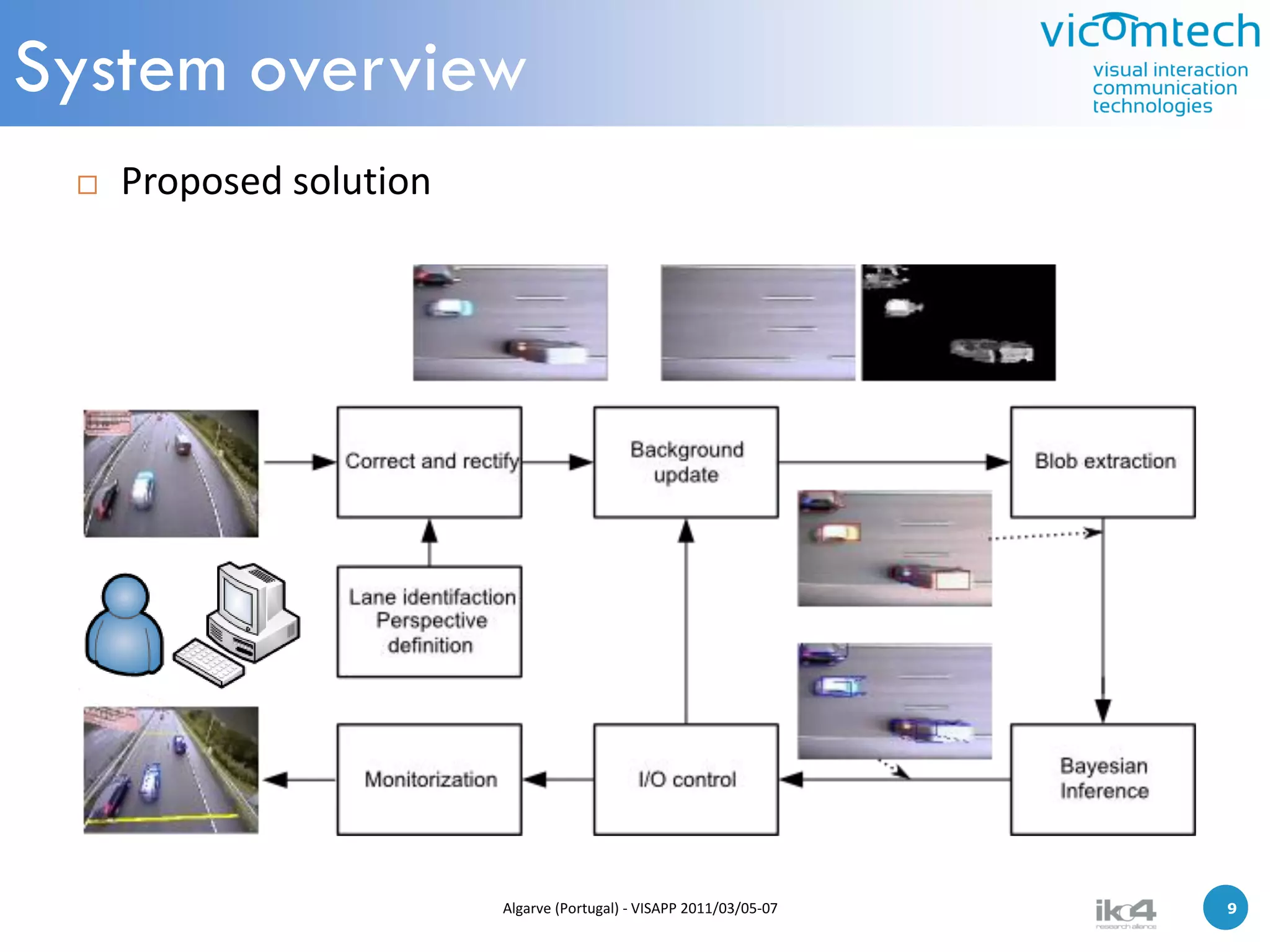
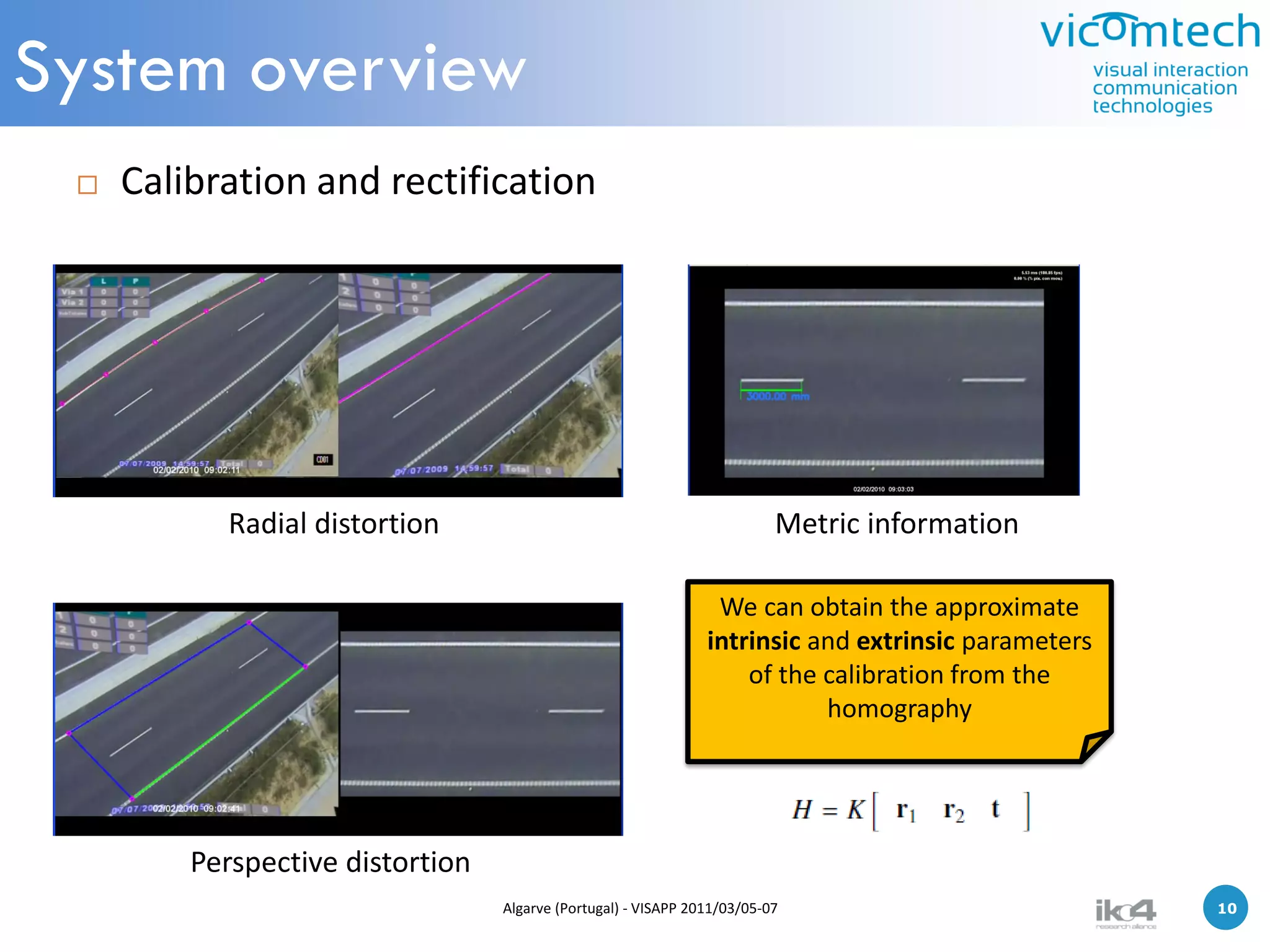
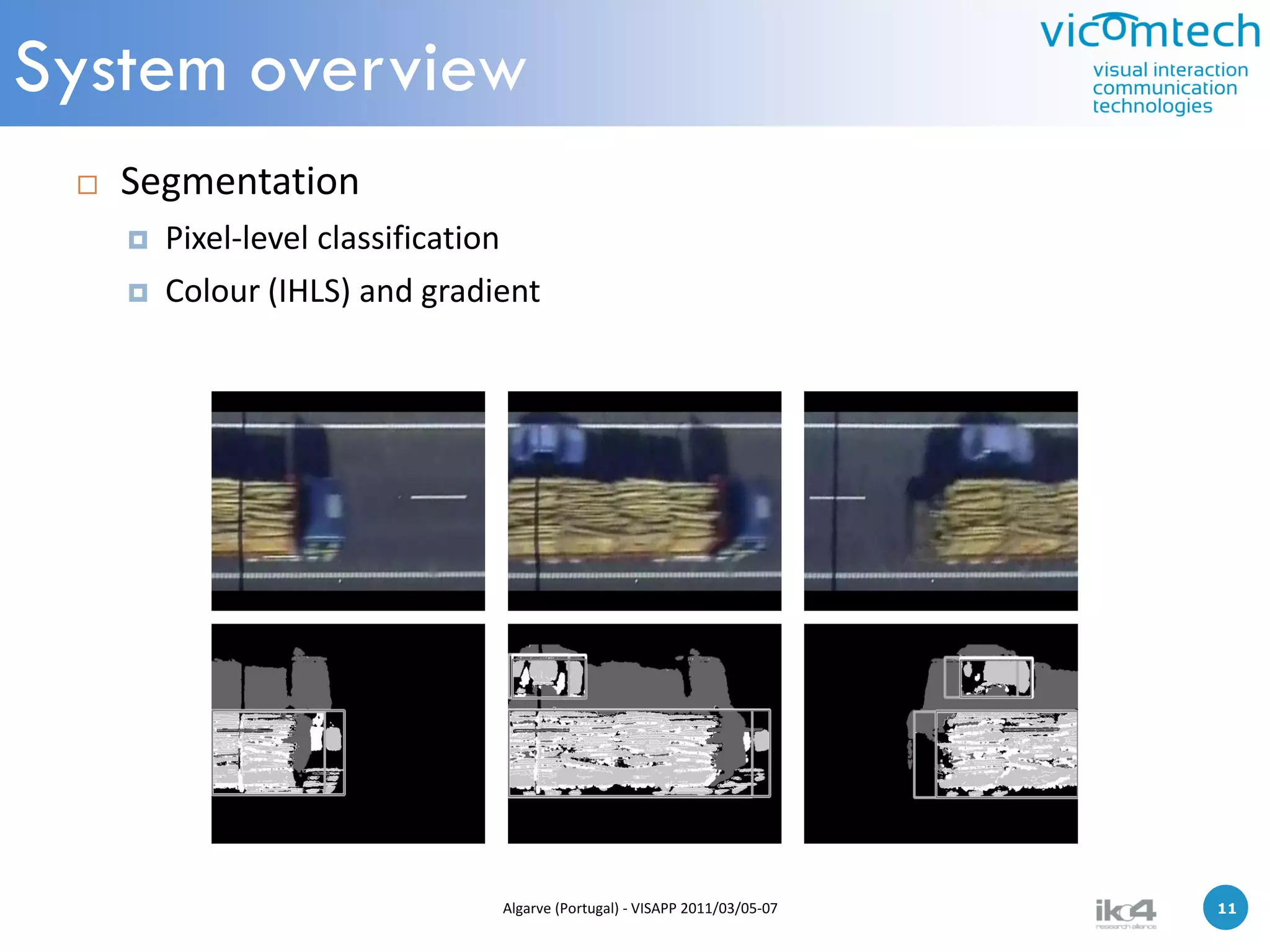
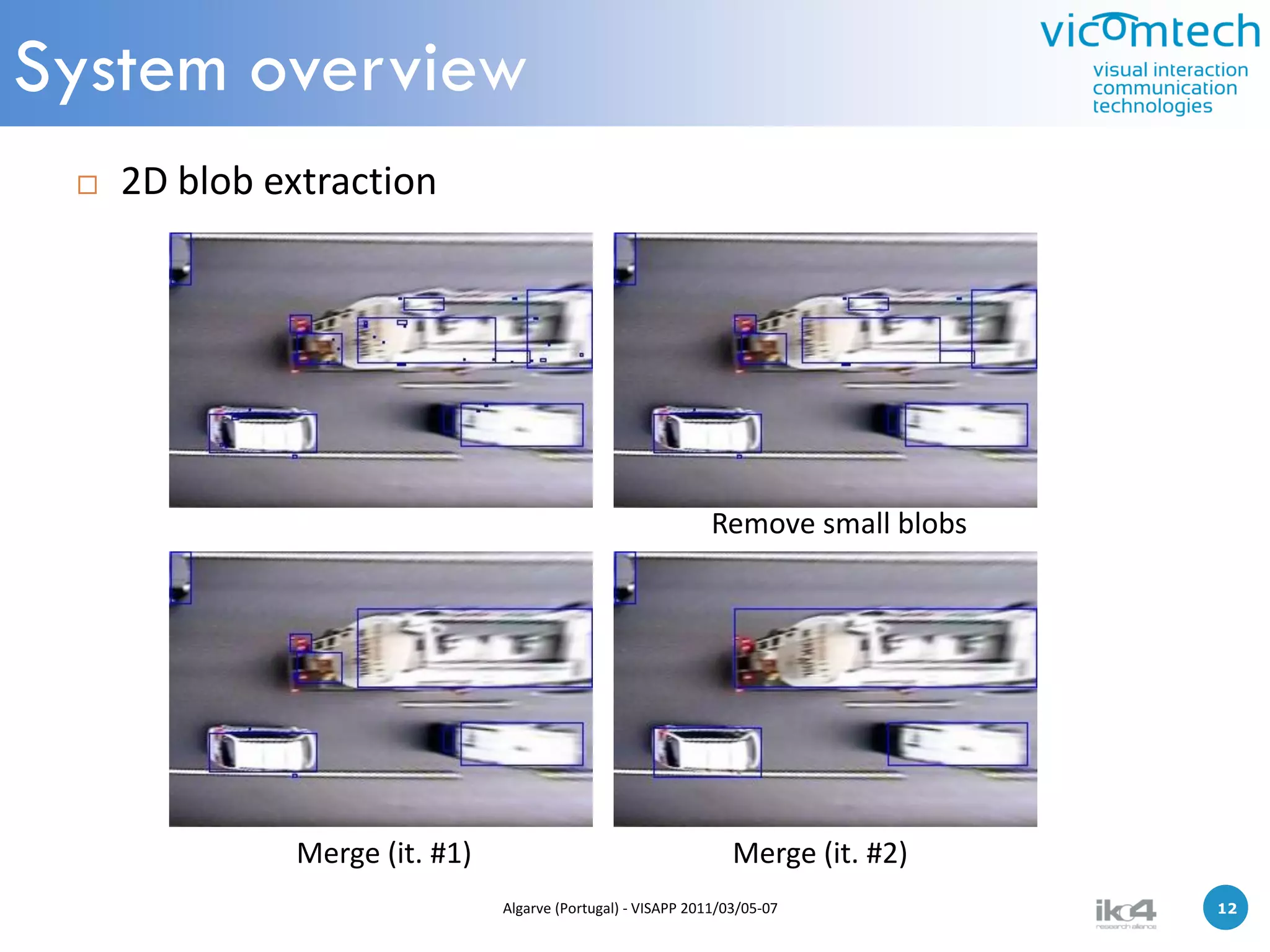
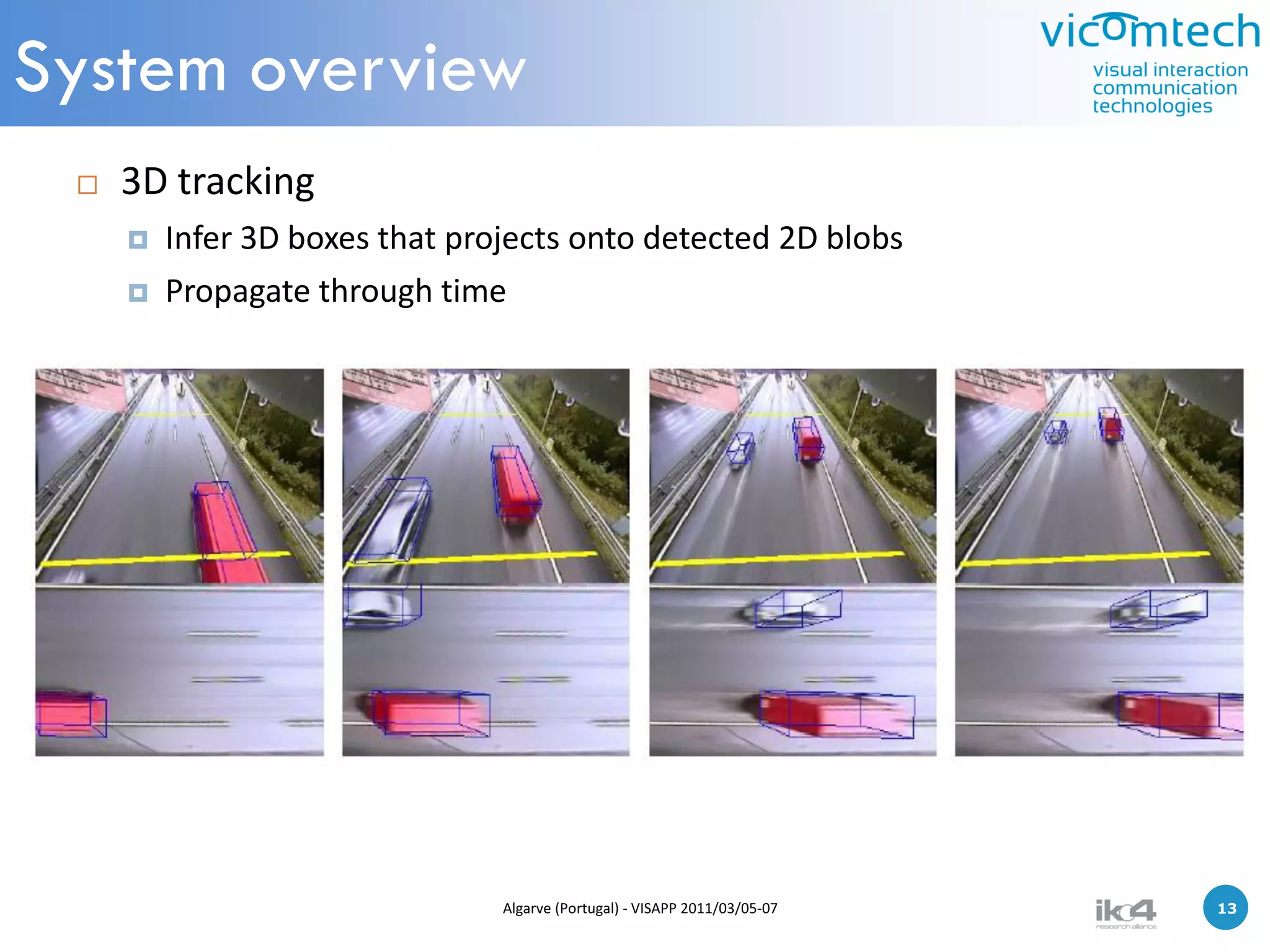
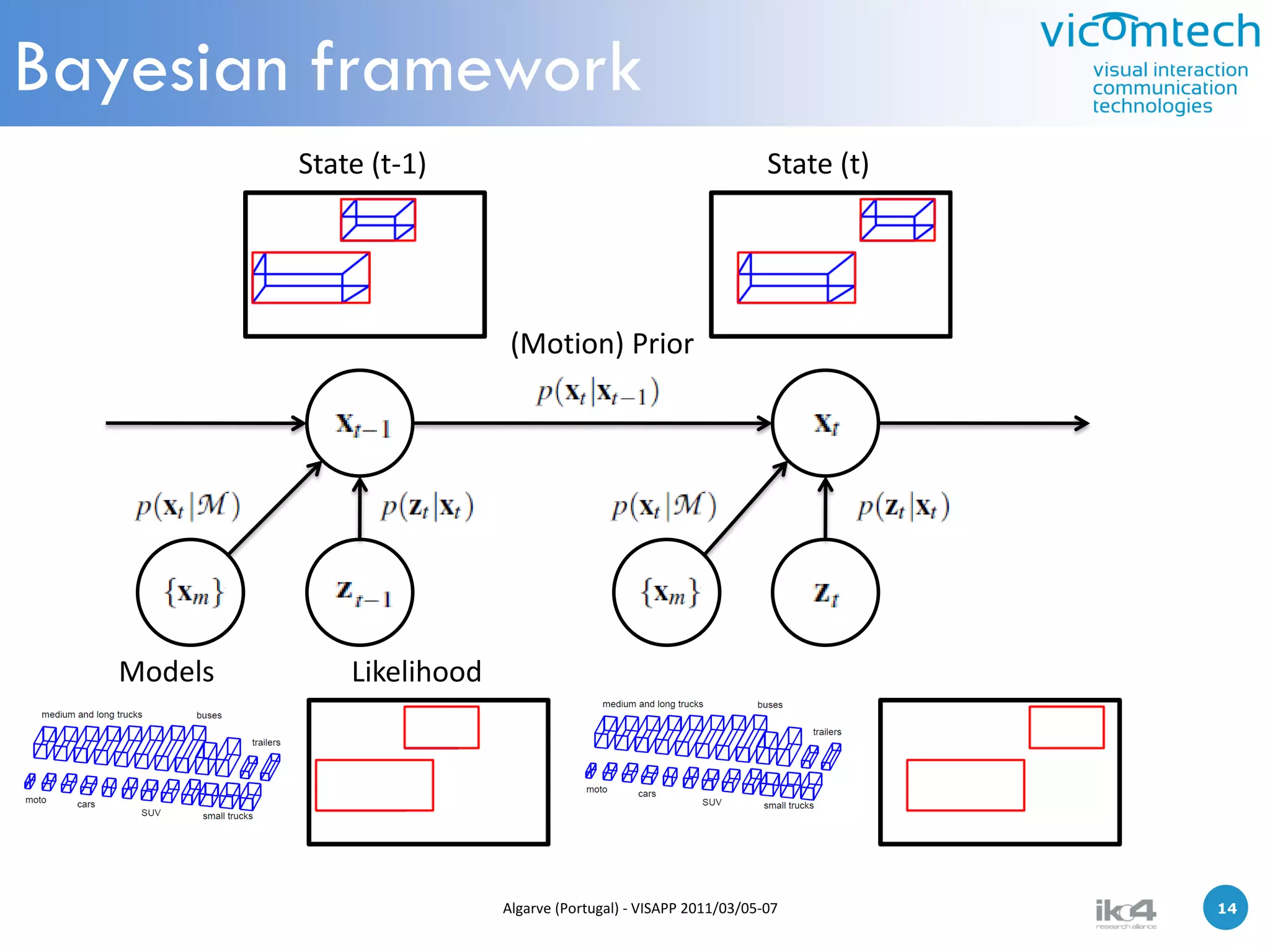
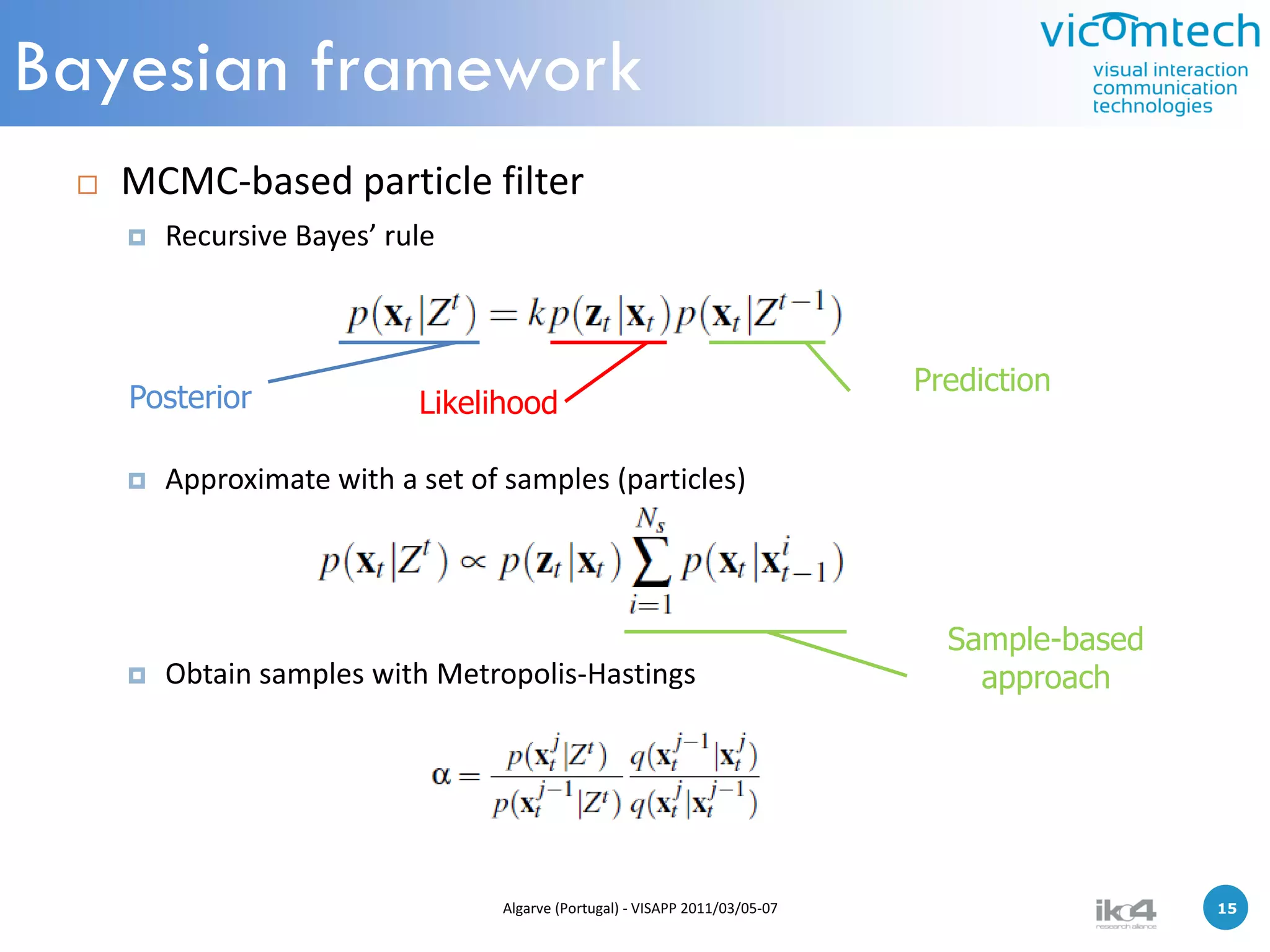
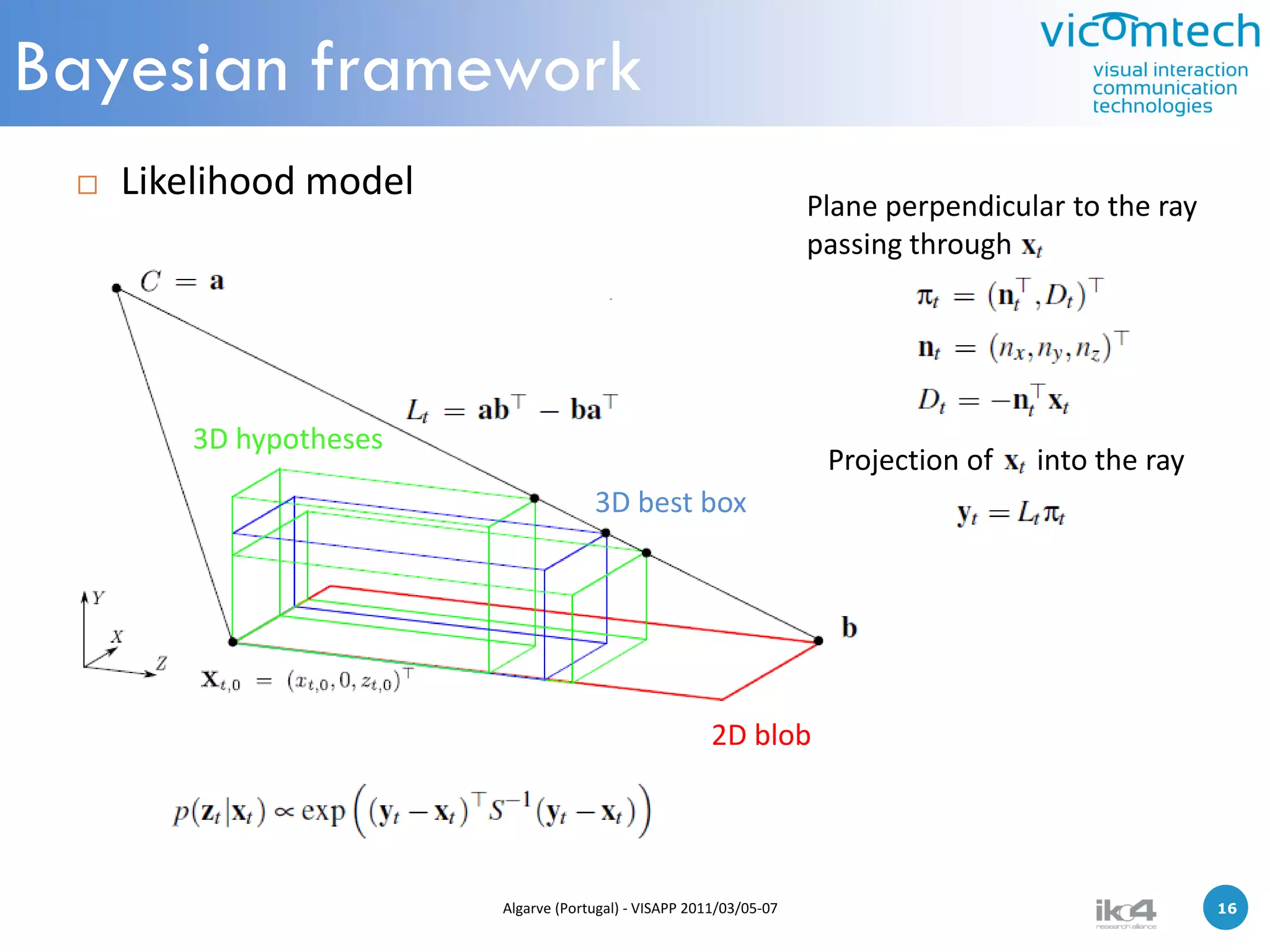
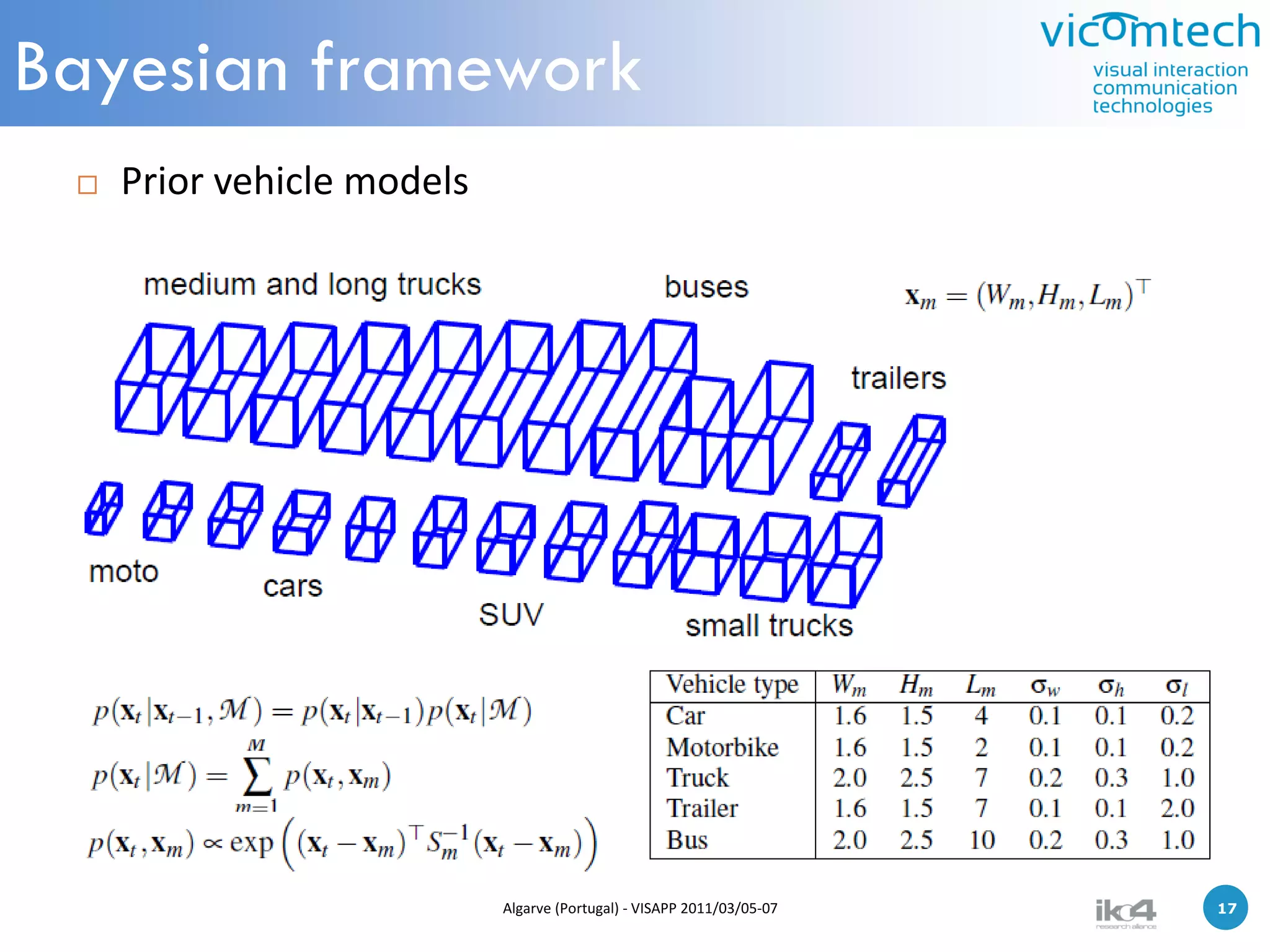
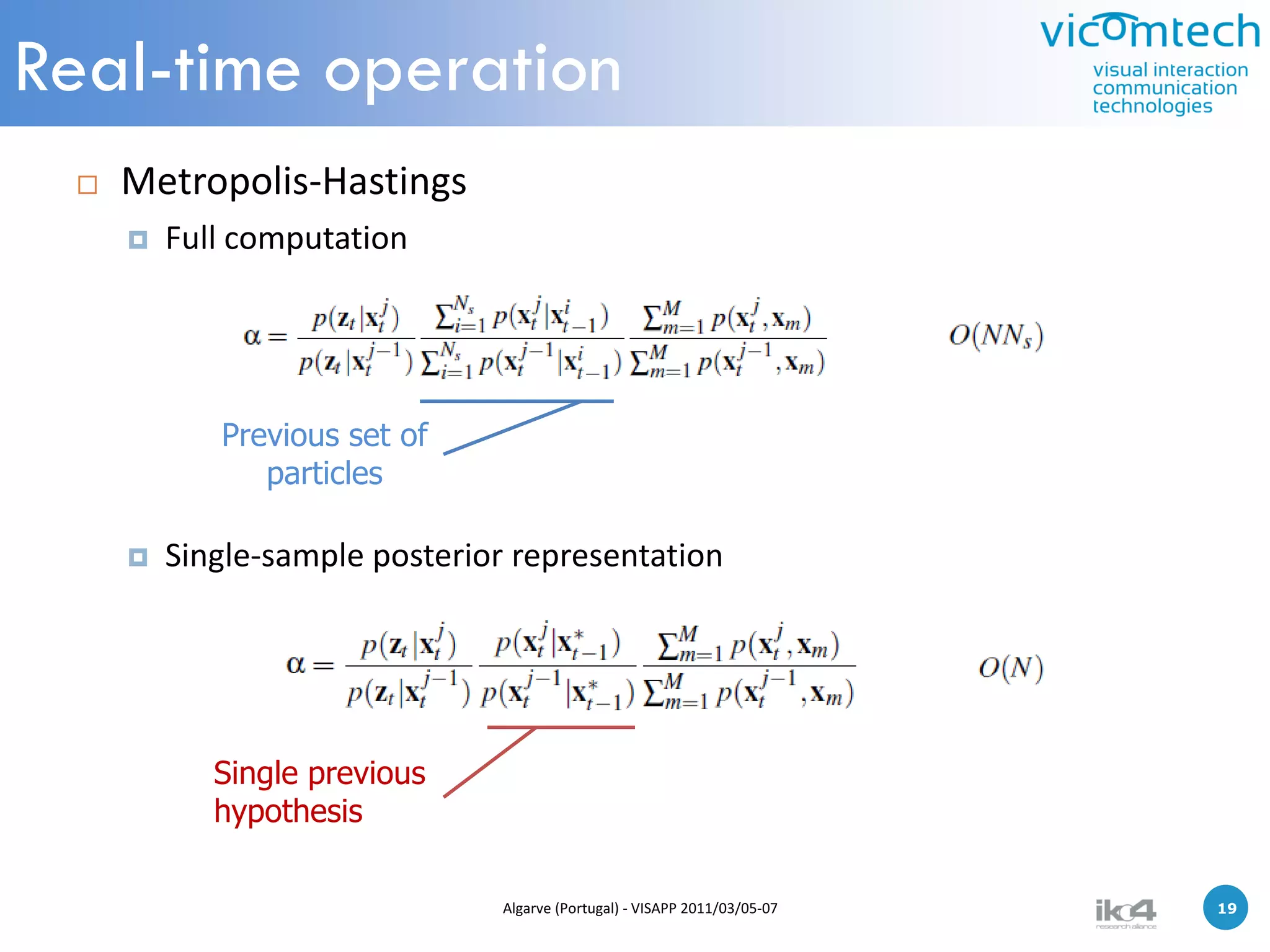
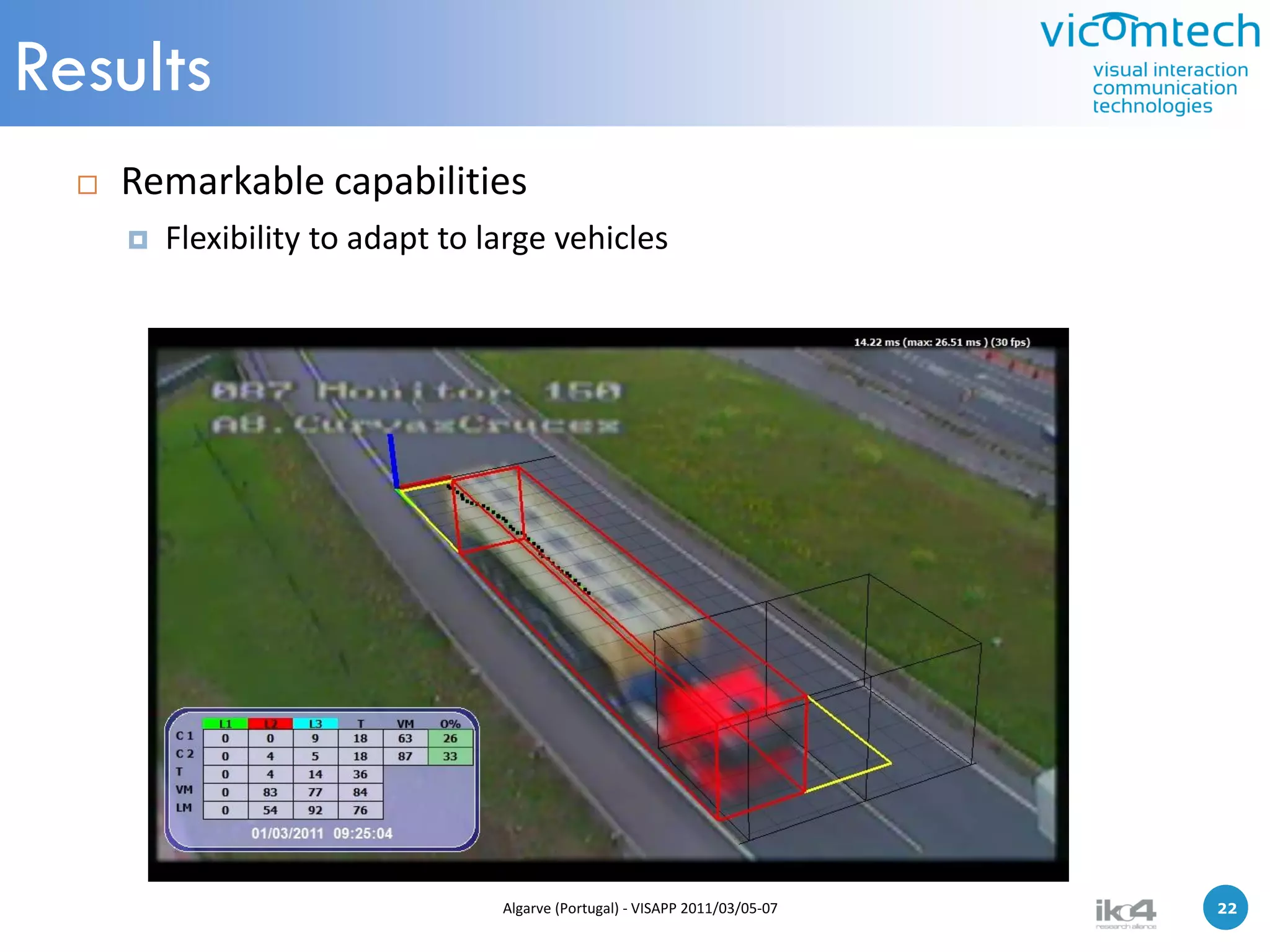
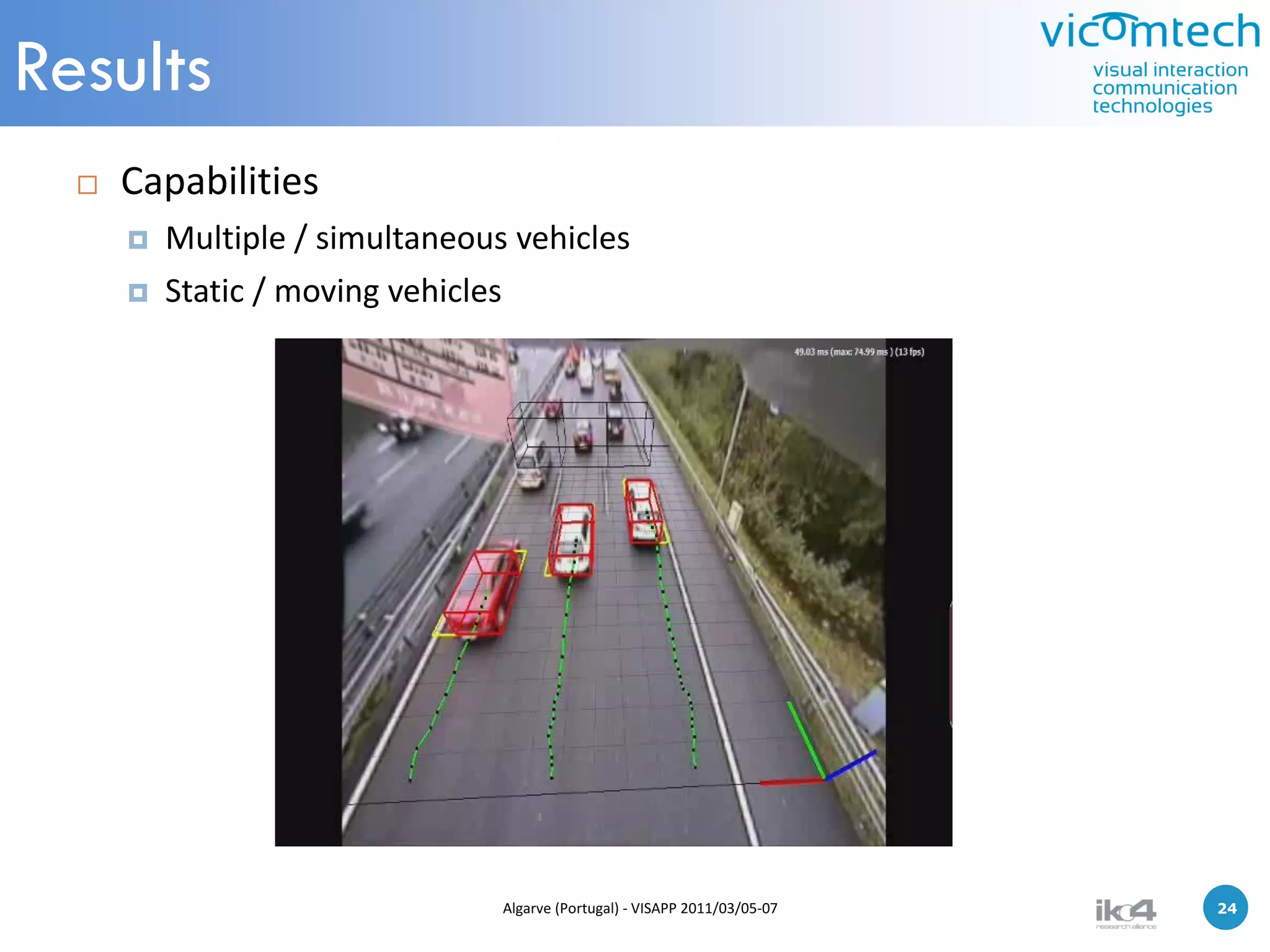
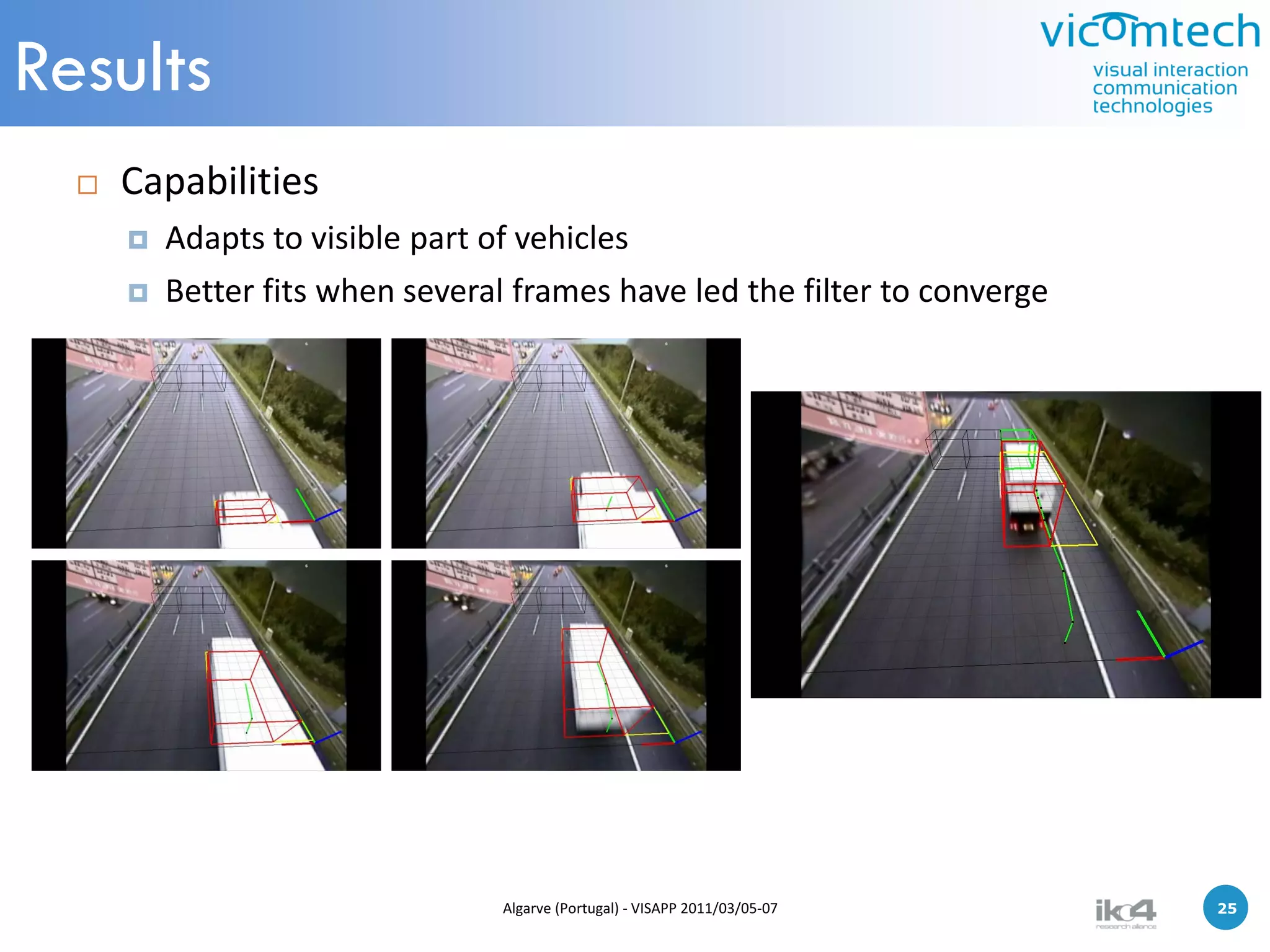

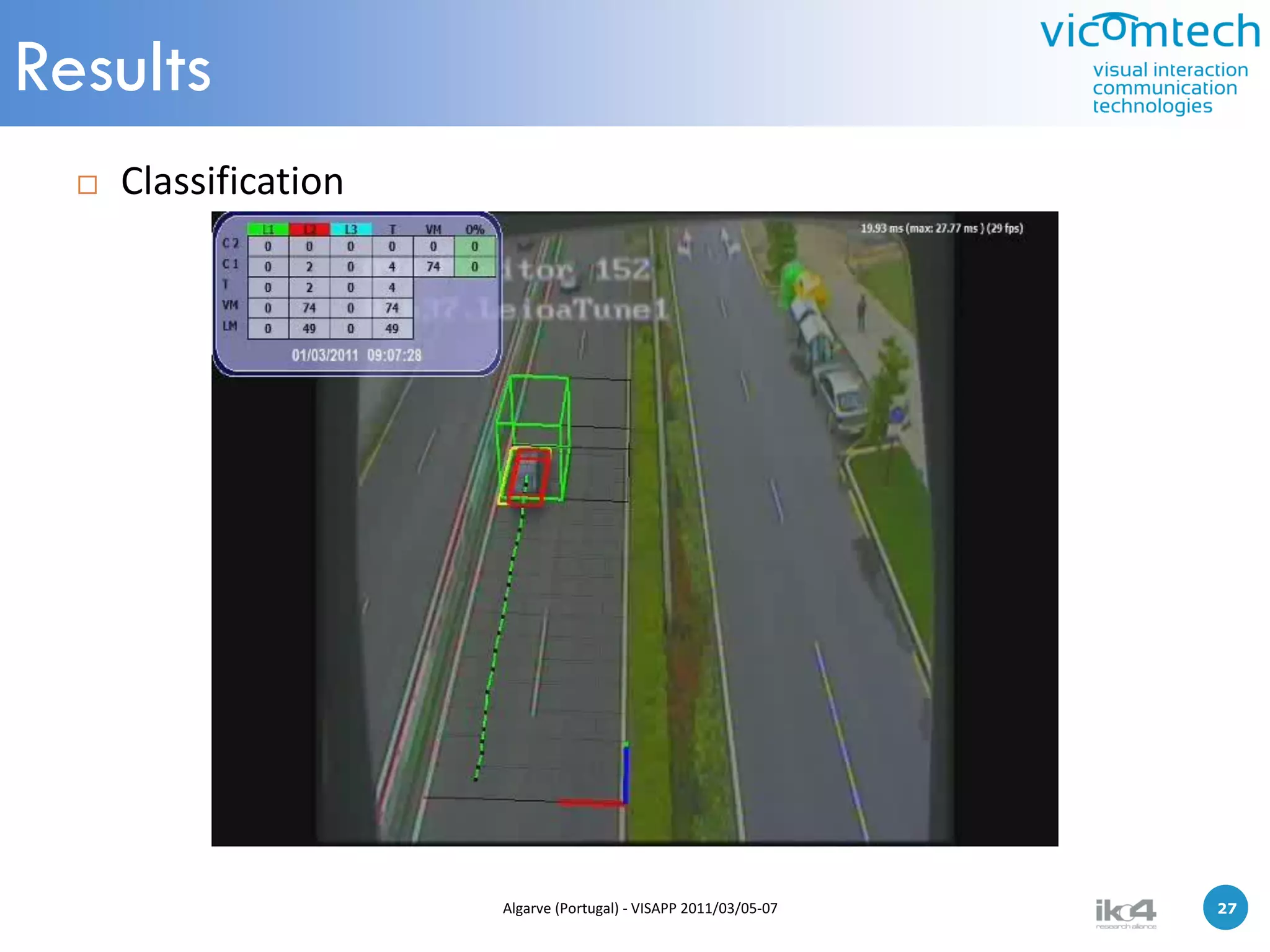
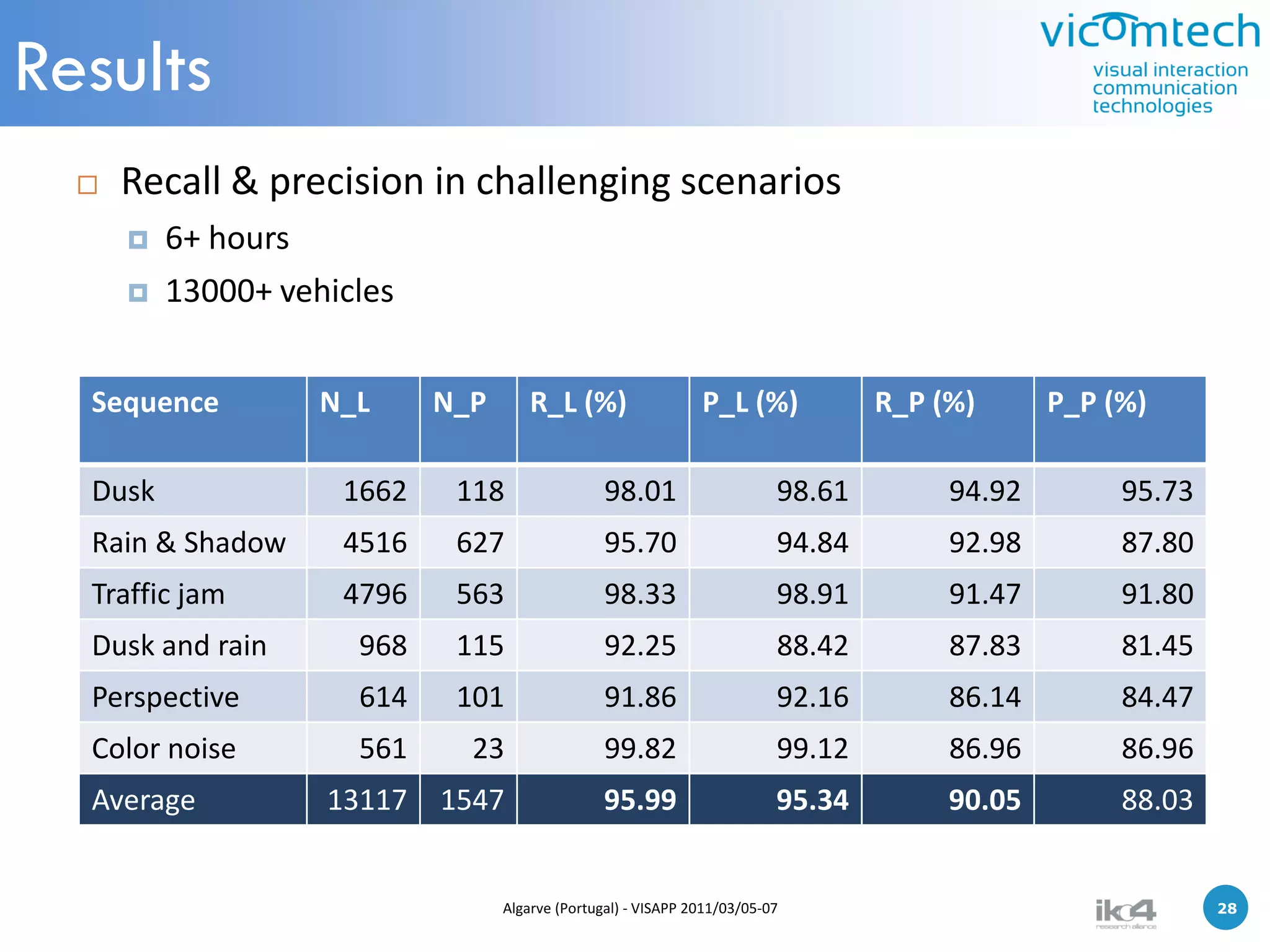
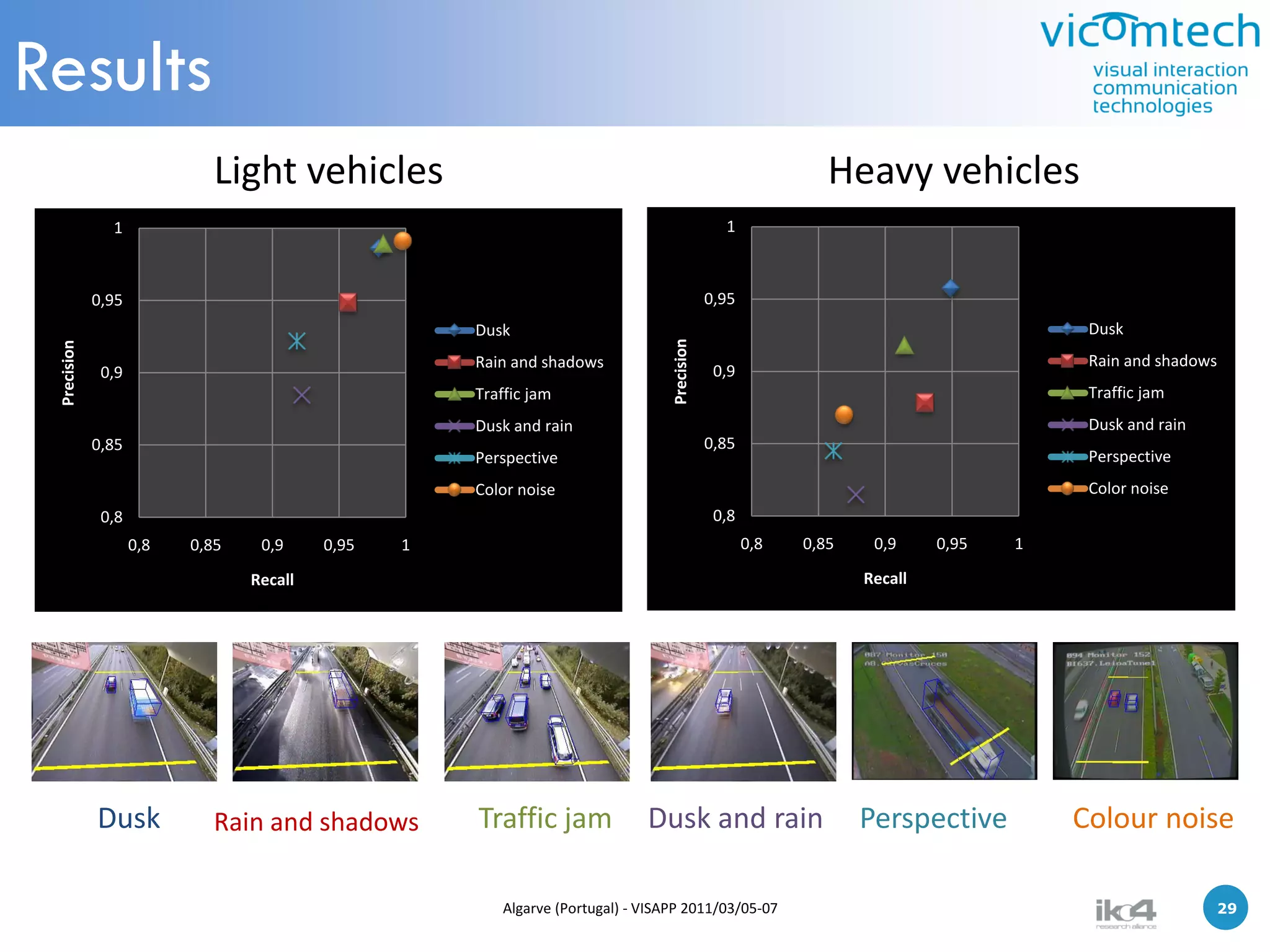
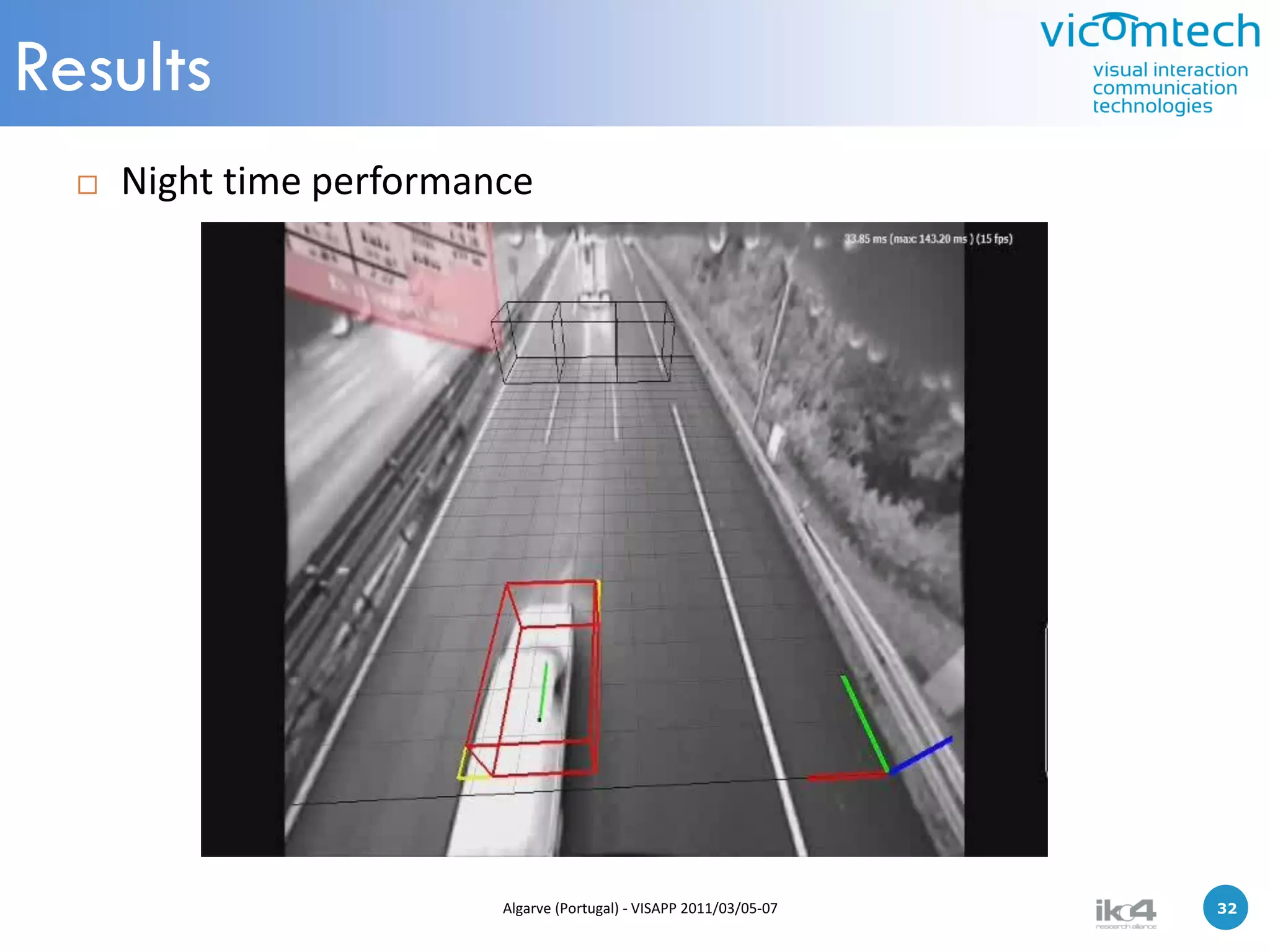

This document summarizes a research paper on real-time 3D modeling of vehicles from monocular camera images. The researchers developed a system that can count and classify vehicles in real-time using a single low-cost camera. It extracts 2D blobs from camera images, then tracks vehicles in 3D using a Bayesian framework and particle filter. The system was able to classify over 13,000 vehicles with over 90% accuracy in challenging scenarios like dusk, rain and traffic jams, demonstrating its flexibility and real-time capabilities.