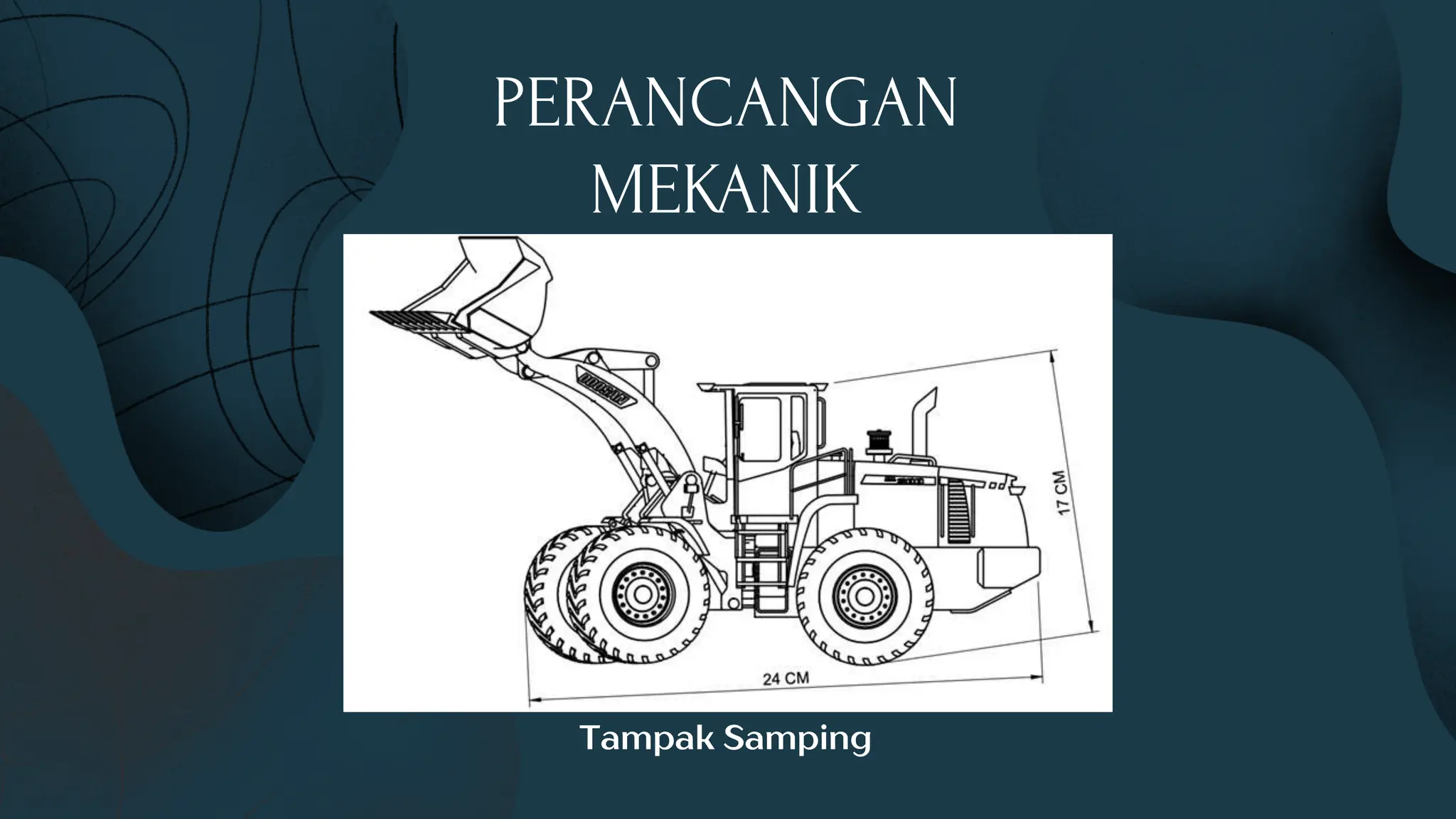
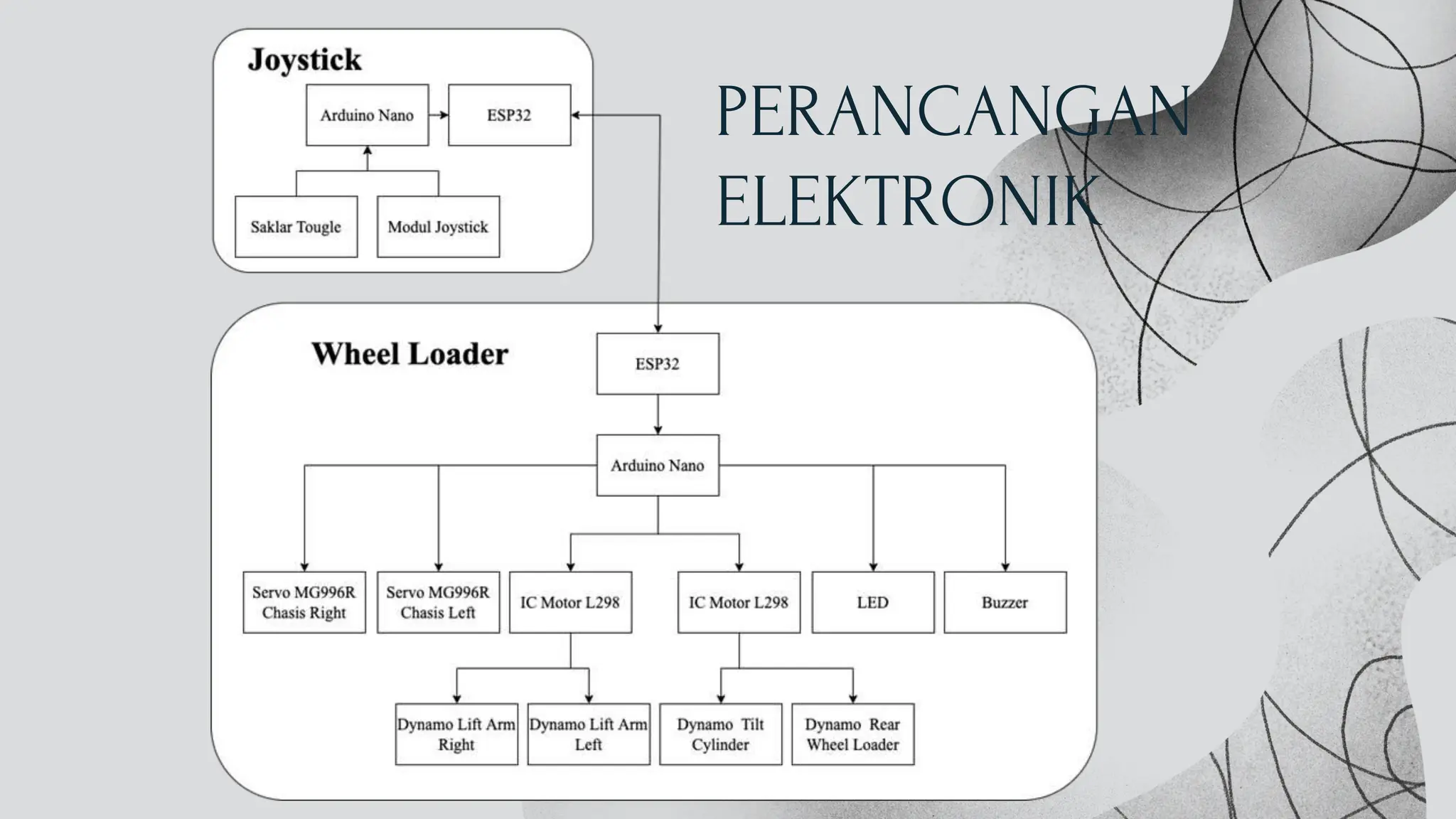
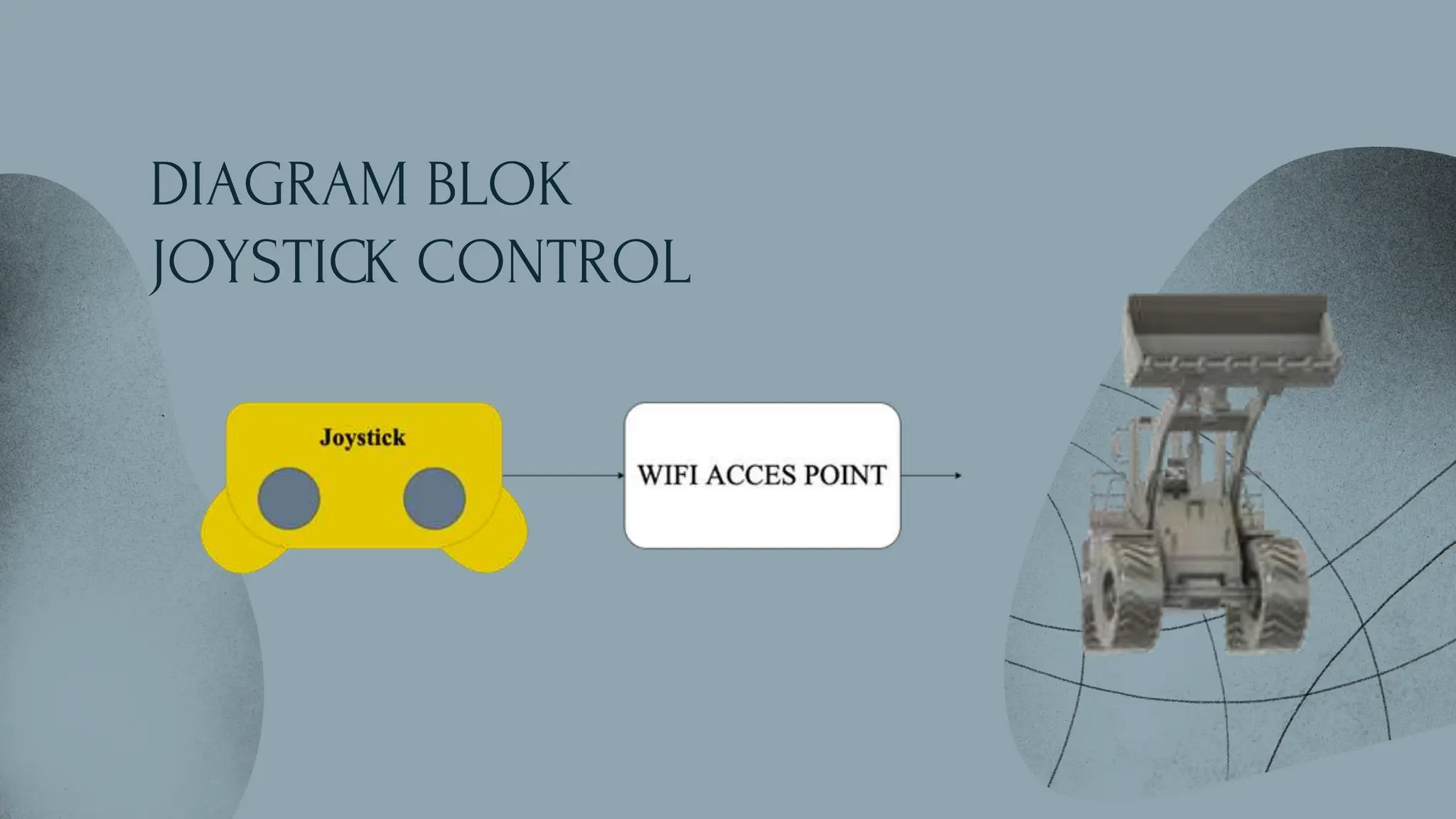
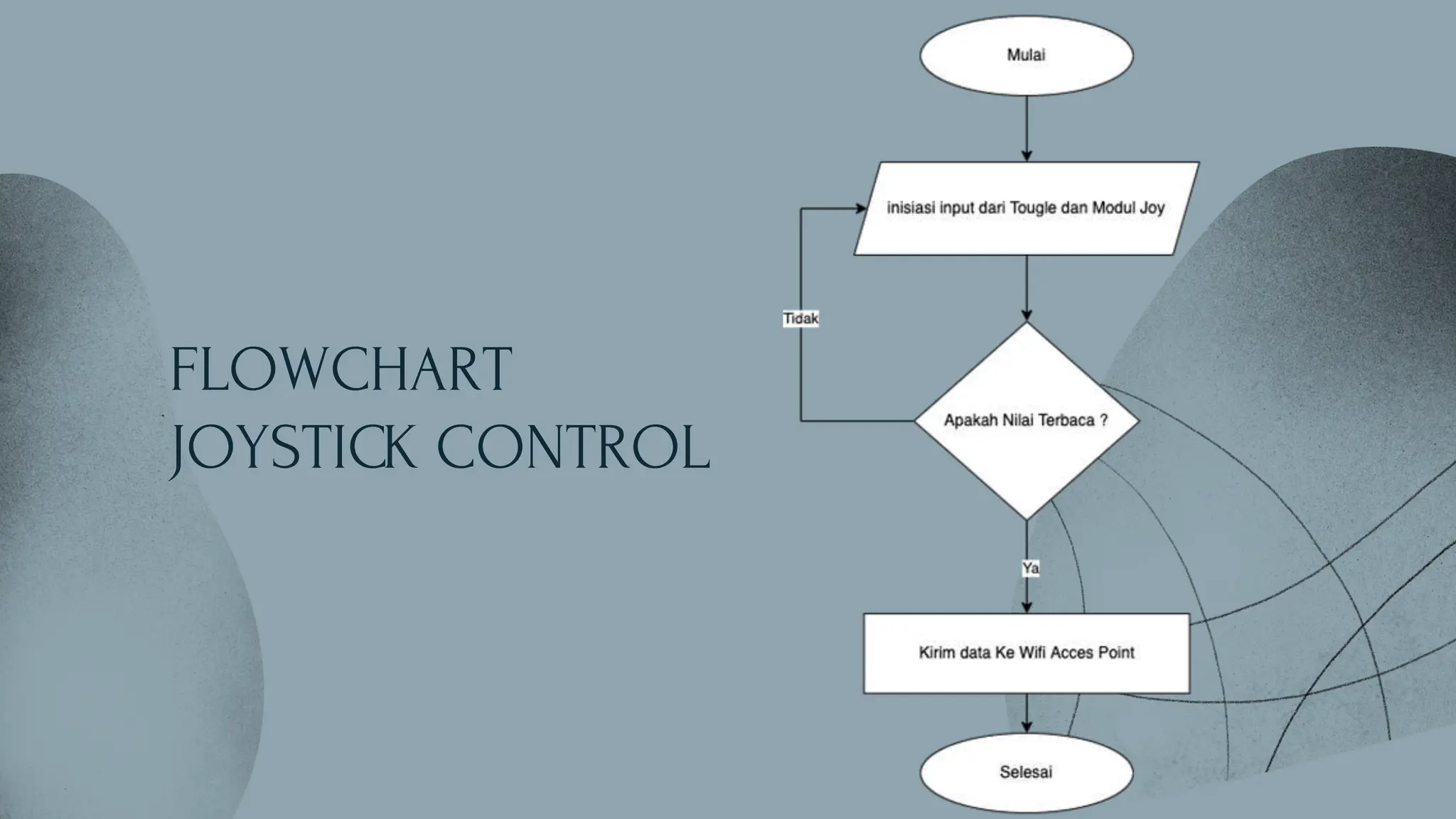
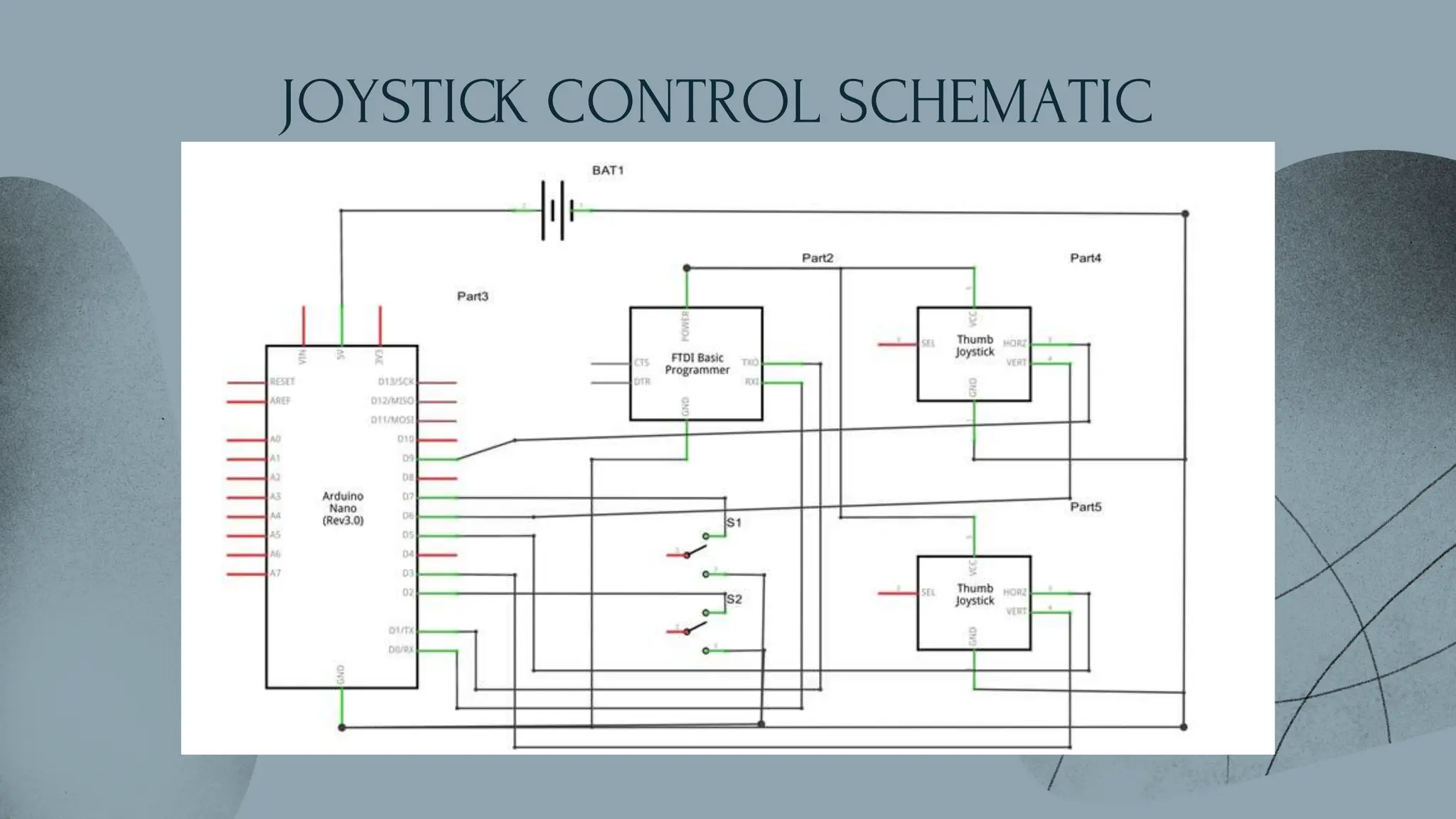
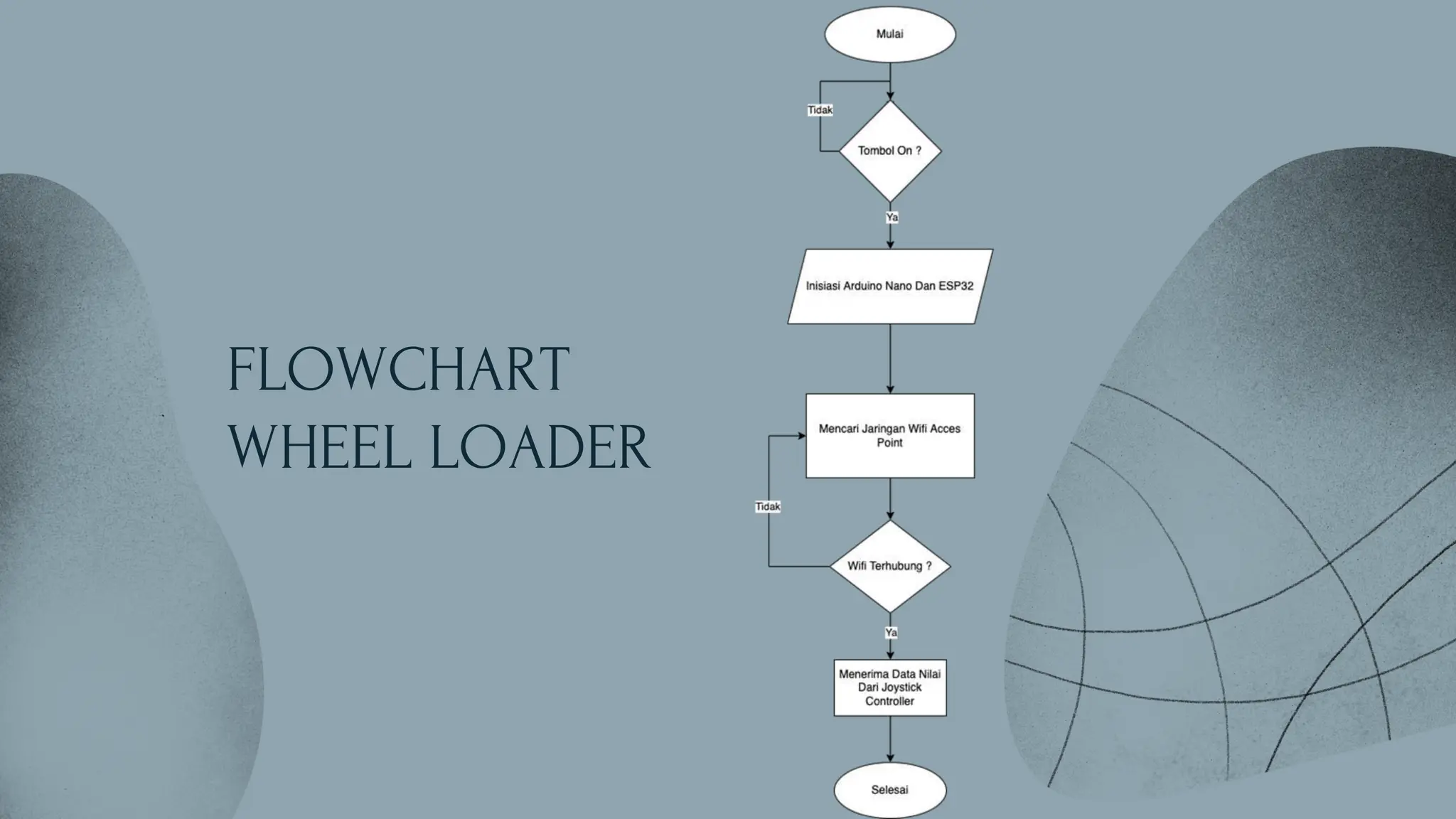
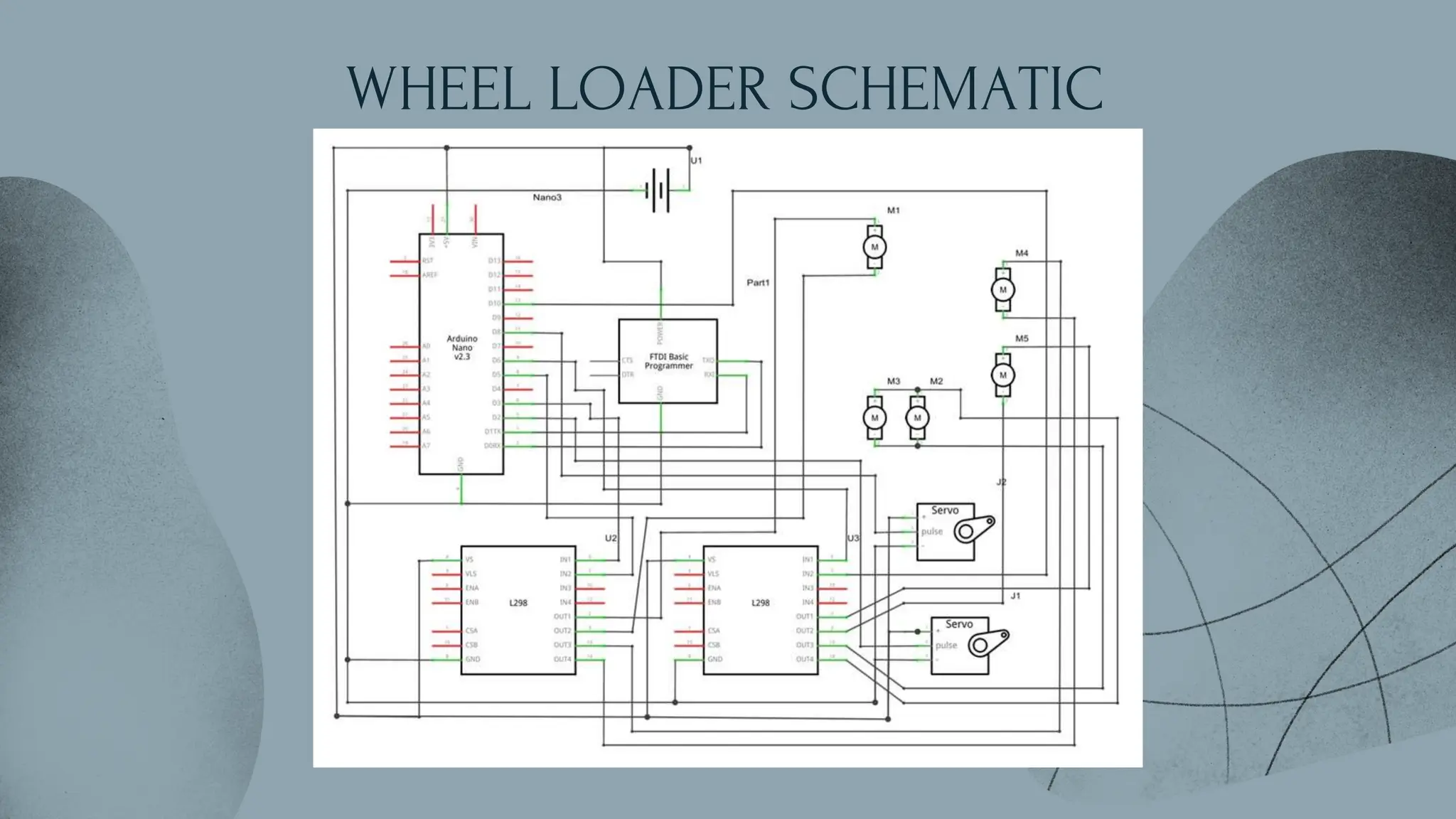
Dokumen ini mengusulkan perancangan sistem pengendalian wheel loader jarak jauh berbasis Arduino untuk mengurangi kecelakaan di perusahaan tambang yang masih menggunakan sistem manual. Proyek ini bertujuan untuk menciptakan prototipe yang menggunakan ESP32 sebagai pengontrol utama dan dilaksanakan di Politeknik Negeri Ujung Pandang dari Februari hingga Juni 2022. Metode yang digunakan meliputi perancangan mekanik dan elektronik untuk menciptakan sistem yang lebih aman.