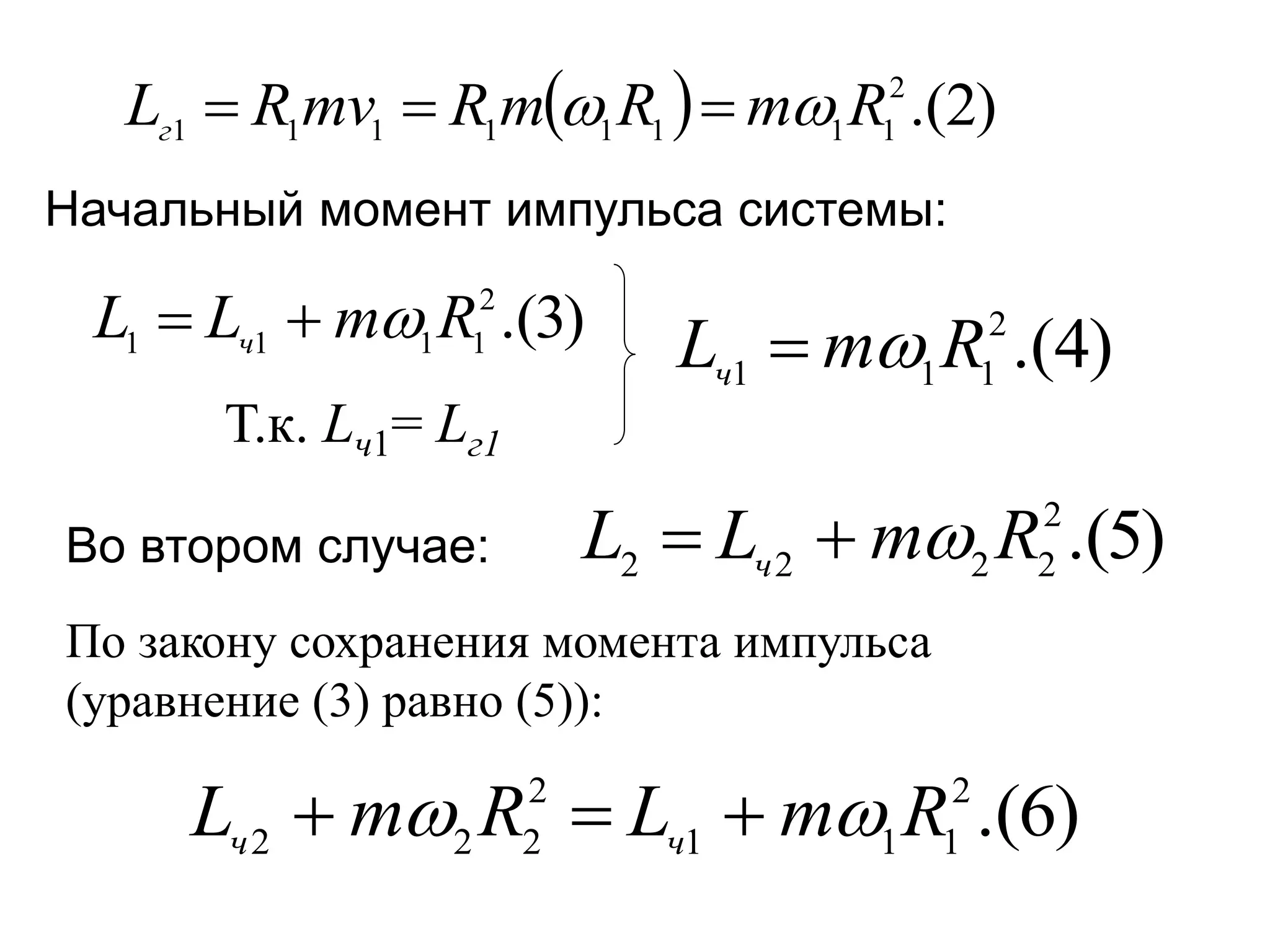
Документ описывает закон сохранения момента импульса, который применим к системам материальных точек, и основывается на принципе статического равновесия твердых тел. Условия равновесия требуют, чтобы векторные суммы всех сил и моментов были равны нулю. Также рассматриваются свойства гироскопов и их приложения, подчеркивая их значимость в навигации и технике.